如何通過CAN的HUB來實現(xiàn)3個CAN節(jié)點的環(huán)形網絡通信
CAN通信一般是總線式的,與RS-485網絡一樣。總線式的網絡通信有缺點:只能夠一條直線或曲線,不能夠開叉,不能夠環(huán)形閉合。開叉布線的問題可以通過加HUB來解決。本文介紹的是如何通過CAN的HUB來實現(xiàn)3個CAN節(jié)點的環(huán)形網絡通信。
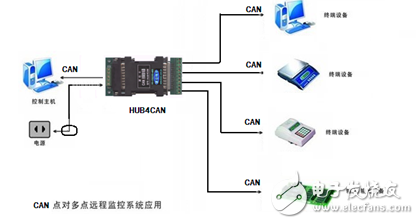
先介紹一下實現(xiàn)CAN的擴展功能的HUB(集線器):HUB4CAN。這是一個把一路CAN擴展出4路CAN的集線器,光電隔離,支持所有CAN協(xié)議而無需設置。一頭為一路CAN和供電端子,另外一頭為擴展出的4路CAN。這個用法與我們常用的USB HUB類似。
在以下情況下,有3個CAN的控制器(或稱為CAN節(jié)點),要求每兩個CAN控制器之間都能夠相互通信。這在傳統(tǒng)的總線式CAN網絡是無法實現(xiàn)的。現(xiàn)在將每個CAN控制器接一個HUB4CAN,注意產品的方向,一邊是1路CAN而另外一邊是4路CAN。我們只用到4路擴展CAN口的其中任意2路。

由于整個環(huán)形網絡中只有3個CAN控制器,每2個CAN控制器之間都可以直接通信而無需通過另外一個控制器。比如 控制器3與控制器2之間通過上面的直線連接就相通了,而無需通過控制器1。同樣控制器3與控制器1之間通過左邊的弧線來直接連接、而控制器1與控制器2之間通過右邊的弧線來直接連接。
用HUB實現(xiàn)的4個節(jié)點的CAN環(huán)網如下圖。至于超過4個節(jié)點的CAN環(huán)形網絡通信,我們將在今后的文章中繼續(xù)介紹。

非常好我支持^.^
(3) 100%
不好我反對
(0) 0%
相關閱讀:
- [電子說] CANOPEN總線編碼器在車輛技術中的應用 2023-10-24
- [電子說] STM32速成筆記(14)—CAN通信 2023-10-24
- [電子說] 低功耗藍牙(BLE)技術簡介和工作方式 2023-10-23
- [電子說] 速銳得解碼匹配特斯拉電動汽車安全性能檢測車架號及BMS電池數據 2023-10-23
- [工業(yè)控制] CANOPEN伺服電機的回零控制方法分享 2023-10-23
- [電子說] 總線伺服電機的回零控制方法 2023-10-23
- [電子說] CAN H對地短路故障分析 2023-10-22
- [電子說] 機器人技術中常用的路徑規(guī)劃算法的開源庫 2023-10-21
( 發(fā)表人:黃昊宇 )