rssi定位算法及讀取RSSI值程序分享
在區域監測、人員跟蹤等無線傳感器網絡的應用領域,位置信息至關重要,事件發生的位置,人員位置均是傳感器網絡應用中的重要信息。隨著移動通信、無線傳感器網絡技術的發展,室內環境下基于位置的服務越來越受到人們的關注,室內人員定位成為一個非常活躍的研究領域。
定位算法從定位手段上分為兩大類: 基于測距算法(range-based )和無需測距算法range-free);根據部署場 合分為室內定位和室外定位,基于測距算法通過測量節點間的距離或角度,使用三邊測量、三角測量或最大似然估計定位法計算節點位置。無需測距定位算法則不需要跳離和角度信息,算法根據網絡連通性等信息來實現節點定位。基于測群的定位算法需要測量節點間的距離,RSSI 是測距的基本方去,但RSSI測距易受環境影響
RSSI 取值策略
無線傳感器網絡中的錨節點可以偵聽目標節點發出的多組Blast包,從面得到相應的RSSI值。RSSI取值有3種策略,分別是多數投票策略均值策略和中值策略。
多數投票策略是在測量的多個RSSI值中。隨機選擇一個。比較此RSSI值與剩余RS5值。得到與自已差距在允許范國內的RSSI值的個數,如果個數超過所有測量值數日的一半,則判定自己的測量值為可用的,否則為不可用。多數投票策略的精確率較高,但是計算量比較大,會消耗節點的大量資源,不適宜用在資源有限的無線傳感器網絡中。
均值策略是計算測得的所有RSSI值的平均值,以平均值作為測量結果,由于RSSI值受環境影響較大,測最值中可能存在錯誤值,這些錯誤值偏離正確值較大時會使均值可信度降低,這樣會導致錯誤的結果。
中值策略很大程度上避免了偏離正確值較大的錯誤值對測量精度的影響。中值策略采用測量值的中值作為測量結果,這樣即使有偏離正確值較大的錯誤值時,它仍然能得到較為正確的測最結果。
這3種策略都不需要增加額外的通信量。表1比較了3種策略的檢測精度、結果錯誤的概事及時間復雜度。
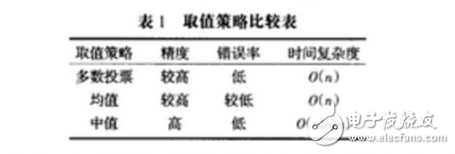
從表1中可以看出,中值策略精度高,計算量較小,是一種適用于無線傳感器網絡的較好方法,用這種策略取錨點測量的RSSI值較為準確。
室內人員定位算法
室內環境信號衰減模型
RSSI 值受周圍環境的影響較大,具有時變特性,會偏離式(1)所示的模型,根據接收信號強度估計出的距離d 有較大誤差,;通過大量數據分析,采用了一個噪聲模型,即環境衰減因素模型,從而有效地補償環境影響帶來的誤差,如式( 2 )。
RSSI=-(A +10nlgd)-EA F (2)
上式中EAFY(dBm )為環境影響因素,它的值取決于室內環境,是靠大量的數據累積的經驗值。EAF(dBm)是一個隨機變量,但為了增強實用性,將其固定為一個值。通過大量比較在驗證環境下測得的RSSI 值與理想狀態下的RSSI 值。得到試驗環境EAF(dBm )的大概值為11.9dBm,A 取值45.n 取值3.5。A.n 及EAF(dBm)的值確定后,重新對RSSI 值進行采樣,并用最小二乘法對采樣值進行擬合。結果如圖3 所示。
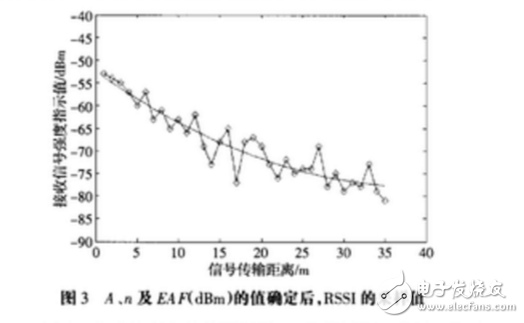
由圖3 曲線的變化趨勢可以看出,盡管模型中參數的取值受到環境因素的影晌,但接收信號強度與信號傳輸距離存在一定的變化關系。到達節點的信號強度與信號傳輸距離墾現出較為明顯地衰減變化趨勢,但并非一條平滑的曲線。這表明利用RSSI 進行定位,存在著一定程度的誤差;當傳輸距離較近時,功率衰減較快,而傳輸距離越遠,衰減越慢;當傳輸距離接近20m 時,信號功率對傳輸距離的變化表現不再明顯。因此,基于RSSI 的定位技術,當傳輸距離越近。定位越準確,傳輸距離越遠,定位誤差越大。
需要指出的是,標定的A.n.EAF(dBm)的值是驗證環境對應的參數,如果環境改變的話,A.n.EAF(dBm)的值都需要重新標定,才可精確測量RSSI 值。
算法性能評估
為了驗證改進算法的性能,進行了一系列實驗。圖9為實驗環境示意圖。實驗以TI 的無線傳感器網絡節點CC2430DB為硬件平臺,采用了11個錨節點,1個目標節點。錨節點放置在地板上,其位置如圖9所示。經測試,得到兩種不同定位算法的定位結果,如表3所示。
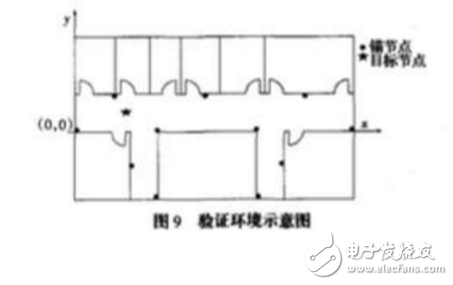

由表3 可以看出,改進后的定位算法定位誤差在3m 范圍內,而未改進算法定位誤差為5m。
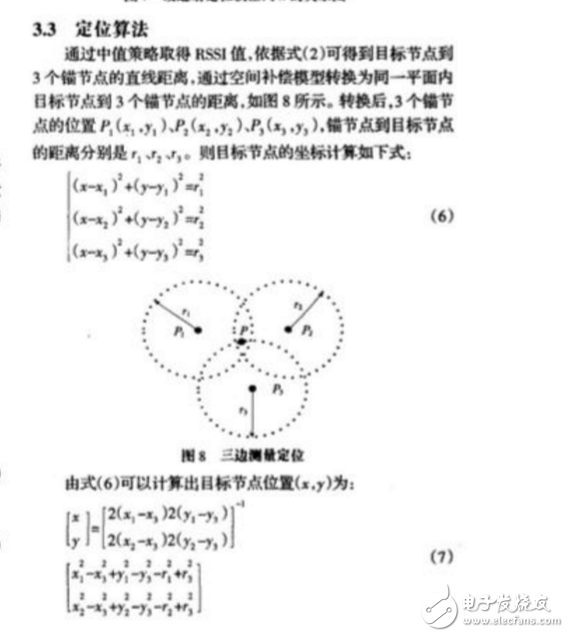
基于rssi的三點定位算法,是已知三個點的坐標和未知點到這三個點的rssi的信號值,求解未知點的坐標。
首先是將rssi信號轉換為距離:
d=10^((ABS(RSSI)-A)/(10*n))
其中d為距離,單位是m。
RSSI為rssi信號強度,為負數。
A為距離探測設備1m時的rssi值的絕對值,最佳范圍在45-49之間。
n為環境衰減因子,需要測試矯正,最佳范圍在3.25-4.5之間。
在獲取未知點到三個點的距離后,剩下的就是求解未知點的坐標。我們都知道兩個圓會相交于一個或者兩個點(如果相交),那么三個圓如果相交的話,必然會交于一個點(三個探測設備在一條直線上的情況下有可能相交于兩個點,這里不考慮),所以我們要求解的未知點便是以三個已知點為圓心,以他們與未知點之間的距離為半徑畫出的三個圓的交點。那么這個問題就轉化為了求三個已知圓的交點,然后如果根據圓的方程:
(x1 – x)^2 + (y1-y)^2 = r1^2
(x2 – x)^2 + (y2-y)^2= r2^2
(x3 – x)^2 + (y3-y)^2= r3^2
求解的話,是非常難求出未知點的坐標的。
這里介紹另一種程序容易實現的計算方法:
一、判斷任意兩個圓是否相切(內切或外切),這里可以設定一個誤差允許值d,也就是
(x1 – x2)^2 + (y1-y2)^2= (r1+r2+d)^2
滿足上述公式時就認為兩個圓相切,其中d為誤差值,可以是正數或者負數。如果兩個圓相切的話,那么交點就比較好求解了:
x = x1+ (x2 - x1)*(r1/(r1 + r2));
y = y1 + (y2- y1)*(r1/(r1 + r2));
求解到x和y的坐標后,只需要用第三個圓進行驗證,即求出這個點到第三個圓的圓心的距離,再和第三個圓的半徑做比較,如果在誤差允許范圍內,那么就可以認為求得的x,y是三個圓的交點,也就是未知點的坐標。
非常好我支持^.^
(393) 63.6%
不好我反對
(225) 36.4%
相關閱讀:
- [電子說] 【大大芯方案】高精度實時定位,大聯大推出基于NXP UWB 3D定位算法與上位機方 2023-10-12
- [電子說] 無線射頻單片機CW32W031讀取RSSI功能介紹 2023-09-20
- [電子說] 基于UWB的非暴露空間位置服務探究 2023-08-29
- [電子說] E-RSSI技術助力更精確的短距離測距應用 2023-07-10
- [電子說] ZSB101A藍牙單點定位方案助力數字鑰匙應用 2023-06-19
- [電子說] UWB定位算法介紹 2023-06-19
- [電子說] 基于平面投影的單目視覺AGV定位算法 2023-06-15
- [電子說] 基于自動駕駛車輛新型的視覺語義定位算法 2023-05-22
( 發表人:李倩 )