?模塊初始參數設置 - 基于藍牙芯片技術的無線通信模塊設計
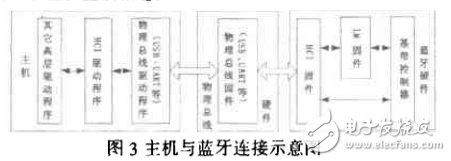
如圖 3 所示是主機和藍牙硬件連接示意圖。主機控制器接口(HCI)提供了一種訪問藍 牙硬件能力的通用接口,HCI 層通過訪問基帶命令、鏈路管理器命令、硬件狀態寄存器、控 制寄存器以及事件寄存器實現對藍牙硬件的HCI 命令。在主機系統的HCI 驅動程序和藍牙 的硬件HCI 固件之間存在的幾個中間層次,又稱為主機控制器傳輸層,提供傳輸數據的能力。該層的目標是透明化,主機控制器驅動程序不關心它是在UART 上還是USB 上,UART 和USB 對主機控制器驅動程序發送到主機控制器的數據不能進行處理,這樣主機控制器接 口和主機控制器可以進行升級,升級不會對傳輸層有任何影響。
3.2 模塊初始參數設置
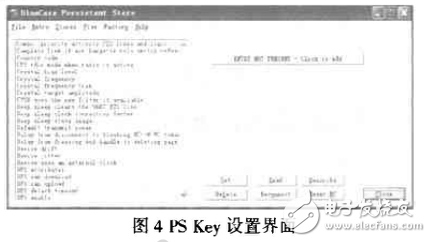
??????? 藍牙模塊加載了各種協議層后并不能工作,還需要根據不同的硬件設計對模塊初始參數 進行設置。基于bluecore2 藍牙芯片的初始參數設置又稱為PSK 設置,可以通過BLUELAB 集成開發環境或者PS Key 設置軟件來實現,如圖4所以為ps key 設置界面。
4藍牙模塊應用實例
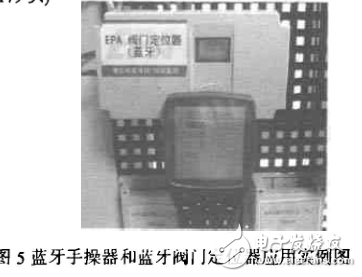
??????? 如圖5所示,以藍牙手操器和藍牙閥門定位器作說明示例。藍牙模塊與閥門定位器中的 控制板進行串口(UART)全雙工通信,閥門定位器的閥位值、閥位上限等各種參數通過串 口送到藍牙模塊,通過藍牙無線通信的方式發送給藍牙手操器,手操器可以用相關指令動態 地修改閥門定位器的對應參數,這改變了傳統的參數設置或修改方法。在閥門定位器中的藍 牙模塊設置為被動鏈接模式,設備啟動后閥門定位器會周期性的采集閥位值并存儲在該設備 的緩沖區內,當藍牙手操器搜索到閥門定位器后向閥門定位器發送鏈接指令,建立鏈接后, 藍牙手操器將獲得一個鏈接句柄。此后進入如圖5 所示的監控界面,可以執行讀閥位值、閥 位上限、以及寫上限三項功能。每項功能在執行時,都由手操器發送一條控制指令,該指令 由串口發給藍牙模塊,其中包括藍牙鏈接句柄、功能代碼(0x01-0x03 分別針對以上的三項 功能)以及CRC 校驗域。閥門定位器收到控制指令后先判斷鏈接句柄,判斷是否接收該指 令,其后根據功能代碼分別執行對應的任務。圖5 中為通過藍牙手操器讀取的閥門定位器的 閥位值。此外,藍牙手操器還可對藍牙電磁流量計,藍牙溫度變送器等設備進行操作。
5結論
??????? 經過現場測試表明,本文設計的藍牙模塊性能穩定、使用方便、實用性強,有一定的抗 干擾能力,還可根據需要進行軟件升級,能有效地嵌入現場設備中代替電纜進行無線通信, 實現了對傳統有線工業控制總線延伸,為工業監控網提供了一種新的聯網方法。
- 第 1 頁:基于藍牙芯片技術的無線通信模塊設計
- 第 2 頁:?模塊初始參數設置
本文導航
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
相關閱讀:
- [移動通信] 5G 3GPP全球頻譜介紹 2023-10-24
- [電子說] 功率放大器的基本原理、分類、工作模式和應用 2023-10-23
- [電子說] 華普微推出首款Matter模塊,助力智能家居互聯互通 2023-10-23
- [電子說] 低功耗藍牙(BLE)技術簡介和工作方式 2023-10-23
- [控制/MCU] 兆易創新推出基于RISC-V內核的GD32VW553系列雙模無線mcu 2023-10-23
- [RF/無線] 基站/手機是怎么知道信道情況的? 2023-10-23
- [電子說] 說說RF信號鏈應用中差分電路的4大優點 2023-10-23
- [電子說] 運放為什么存在偏置電流?運放輸入級對偏置電流的影響? 2023-10-23
( 發表人:黃昊宇 )