") 怎樣用ArduinoUno控制采用雙伺服SG90電機(jī)的云臺(tái)式攝像機(jī)支架
怎樣用ArduinoUno控制采用雙伺服SG90電機(jī)的云臺(tái)式攝像機(jī)支架
操縱桿模塊
操縱桿是控制伺服電機(jī)的最簡(jiǎn)單方法之一。雖然一些教程需要電機(jī)或其他額外的東西,但本教程只需要基本的外圍設(shè)備。操縱桿又名“拇指操縱桿”是項(xiàng)目的一個(gè)很酷的控制界面,特別是對(duì)于機(jī)器人技術(shù)。 X軸和Y軸是兩個(gè)~10k的電位計(jì),可以通過(guò)生成模擬信號(hào)來(lái)控制2D運(yùn)動(dòng)。還有一個(gè)按鈕,可用于控制其他命令或動(dòng)作。
HC-SR04
在本教程中,我將以HC-SR04超聲波傳感器為例設(shè)置伺服控制的云臺(tái)。但是,請(qǐng)記住,支架可用于傳感器,相機(jī)等!
讓我們開(kāi)始吧
收集硬件
Arduino UNO
2伺服電機(jī)SG90
操縱桿模塊
雙伺服支架
一些跳線
HC-SR04
Arduino UNO
操縱桿模塊
伺服電機(jī)
面包板
云臺(tái)支架套件
首先組裝雙伺服支架。我正在使用Sparkfun的搖攝/傾斜支架套件。
連接硬件
讓我們從2個(gè)伺服器開(kāi)始。我正在使用面包板來(lái)簡(jiǎn)化連接。
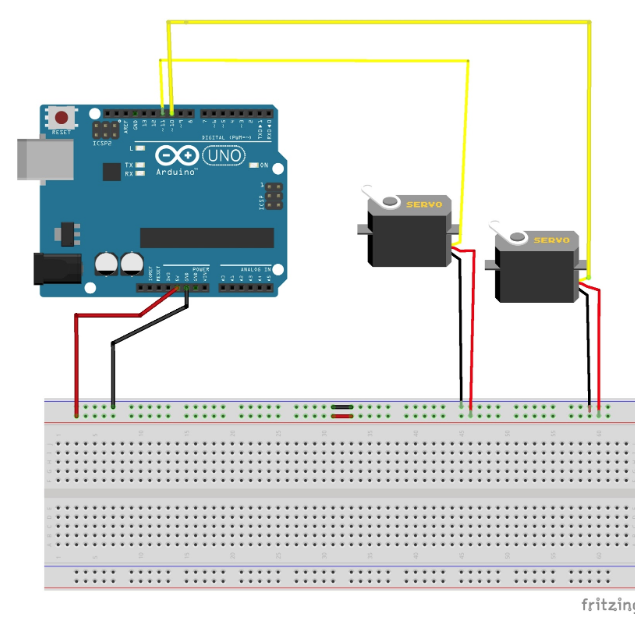
伺服電機(jī)和Arduino Uno的連接。
上/下伺服Arduino右/左伺服Arduino
紅色電纜5V紅色電纜5V
黑色電纜GND黑色電纜GND
黃色或白色電纜P WM(4)黃色或白色電纜PWM(10)
按照上面和下面的連接圖完成連接。
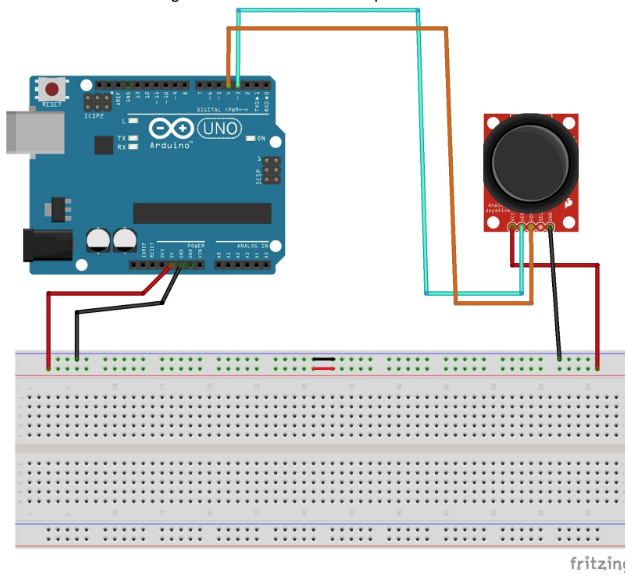
操縱桿模塊的連接和Arduino Uno。
操縱桿Arduino
5V5V
GNDGND
U/DU/D模擬4
L/RL/R模擬3
最終布線如下:
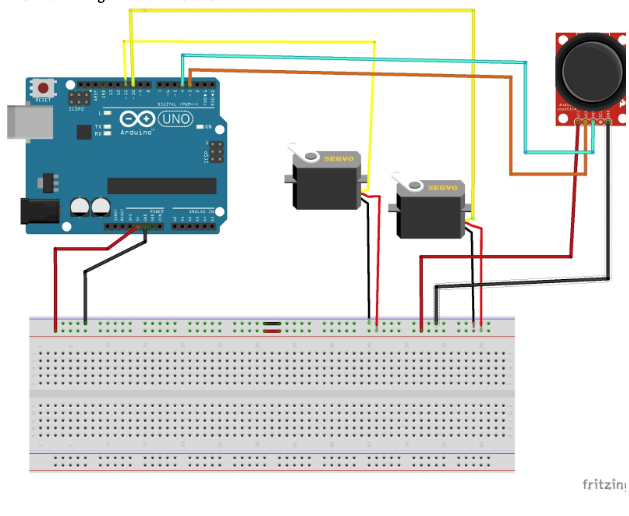
最終的項(xiàng)目原理圖。
一切都連接后,它將如下所示!
源代碼
將以下代碼復(fù)制并粘貼到Arduino軟件中。在將代碼上傳到Arduino板之前,請(qǐng)務(wù)必測(cè)試(編譯)代碼。
當(dāng)您將代碼上傳到Arduino時(shí),在您使用操縱桿之前,伺服器不應(yīng)移動(dòng)。
#include
const int servo1 = 11; // first servo
const int servo2 = 10; // second servo
const int joyH = 3; // L/R Parallax Thumbstick
const int joyV = 4; // U/D Parallax Thumbstick
int servoVal; // variable to read the value from the analog pin
Servo myservo1; // create servo object to control a servo
Servo myservo2; // create servo object to control a servo
void setup() {
// Servo
myservo1.attach(servo1); // attaches the servo
myservo2.attach(servo2); // attaches the servo
// Inizialize Serial
Serial.begin(9600);
}
void loop(){
// Display Joystick values using the serial monitor
outputJoystick();
// Read the horizontal joystick value (value between 0 and 1023)
servoVal = analogRead(joyH);
servoVal = map(servoVal, 0, 1023, 0, 180); // scale it to use it with the servo (result between 0 and 180)
myservo2.write(servoVal); // sets the servo position according to the scaled value
// Read the horizontal joystick value (value between 0 and 1023)
servoVal = analogRead(joyV);
servoVal = map(servoVal, 0, 1023, 70, 180); // scale it to use it with the servo (result between 70 and 180)
myservo1.write(servoVal); // sets the servo position according to the scaled value
delay(15); // waits for the servo to get there
}
/**
* Display joystick values
*/
void outputJoystick(){
Serial.print(analogRead(joyH));
Serial.print (“---”);
Serial.print(analogRead(joyV));
Serial.println (“----------------”);
}
-
云臺(tái)
+關(guān)注
關(guān)注
1文章
69瀏覽量
13845 -
Arduino
+關(guān)注
關(guān)注
188文章
6485瀏覽量
189703 -
SG90
+關(guān)注
關(guān)注
0文章
9瀏覽量
11587
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
索尼推出首款攝像機(jī)跟蹤系統(tǒng)OCELLUS
海康威視發(fā)布視覺(jué)大模型周界攝像機(jī)
方案:雙軸伺服電機(jī)驅(qū)動(dòng)控制器AGV、AMR專用雙伺服電機(jī)驅(qū)動(dòng)控制器帶
AI智能識(shí)別監(jiān)測(cè)攝像機(jī)

MS41928M——網(wǎng)絡(luò)攝像機(jī)·監(jiān)控攝像機(jī)用鏡頭驅(qū)動(dòng)芯片(內(nèi)置光圈控制)
AI圖像識(shí)別攝像機(jī)
安信可Ai-WB2+舵機(jī)控制(SG90)

伺服電機(jī)原理及控制應(yīng)用
MS41908M——網(wǎng)絡(luò)攝像機(jī)·監(jiān)控攝像機(jī)用鏡頭驅(qū)動(dòng)芯片

艾畢勝電子攝像機(jī)云臺(tái)驅(qū)動(dòng)板方案
探索伺服轉(zhuǎn)臺(tái)型云臺(tái)驅(qū)動(dòng)方案在云臺(tái)攝像機(jī)中的神奇應(yīng)用
科技之眼:云臺(tái)攝像機(jī)機(jī)芯在無(wú)人機(jī)領(lǐng)域的應(yīng)用與前景

伺服電機(jī)壓力機(jī)的作用是什么
esp32想用自帶的LEDPWD來(lái)驅(qū)動(dòng)sg90發(fā)現(xiàn)沒(méi)有反應(yīng),為什么?
基坑監(jiān)測(cè)識(shí)別攝像機(jī)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論