") 關于四旋翼飛行器的核心知識介紹和應用分析
關于四旋翼飛行器的核心知識介紹和應用分析
當今飛行器的發(fā)展已經(jīng)給我們的生活帶來了極大的便利。雖然因安全性的問題遭到了一些限制,但是就目前來說,飛行器的發(fā)展給人們帶來的便利仍然無法取代。各行各業(yè)越來越多的人們更多地愿意接受并使用這一科技帶來的新產(chǎn)品。
例如,飛行器在植保、快遞、搜救、航拍以及巡檢方面的普及速度非常快。隨著需求不斷的擴大,未來在這些方面,使用飛行器取代傳統(tǒng)的作業(yè)方式就指日可待了。
而比較普遍的四軸飛行器跟其他類型相比差異在于,它的硬件結(jié)構更簡單緊湊,但是軟件就比較復雜,所有除了搞懂理論知識之外還需要實物操作講解,這樣才能事半功倍,那么我在這給大家簡單羅列梳理一下飛行器里比較核心的知識點,希望能帶給大家一幫助。
感興趣或者接觸過的人都知道四軸飛行器是如何飛行的?四軸飛行器的螺旋槳與空氣發(fā)生相對運動,產(chǎn)生了向上的升力,當升力大于四軸的重力時四軸就可以起飛了。
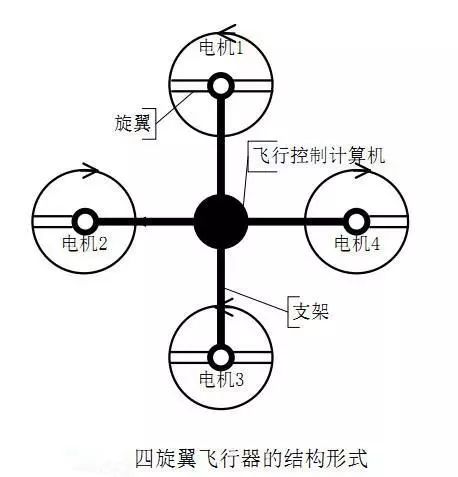
四軸飛行器飛行過程中如何保持水平,我們先假設一種理想狀況,如果四個電機的轉(zhuǎn)速是完全相同的,是不是我們控制四軸飛行器的四個電機保持同樣的轉(zhuǎn)速,當轉(zhuǎn)速超過一個臨界點時(升力剛好抵消重力)四軸就可以平穩(wěn)的飛起來了呢?
答案是否定的,由于四個電機轉(zhuǎn)向相同,四軸會發(fā)生旋轉(zhuǎn)。我們控制四軸電機1和電機3同向,電機2電機4反向,剛好抵消反扭矩,巧妙的實現(xiàn)了平衡,但是實際上由于電機和螺旋漿本身的差異,造成我們無法做到四個電機產(chǎn)生相同的升力,這樣飛行器起飛之后就會失去平衡,所以需要對飛行器設置好四軸運算和飛控。
那什么是飛控呢?
無人機或者飛行器的控制器就叫做飛控,了解這種控制方法不僅是其中的四軸算法還包括控制對象、控制器等等。
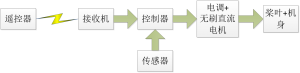
傳感器構成控制回路的閉環(huán),遙控器給過來的信號可以作為控制目標,這時只涉及到油門控制也就是油門曲線和姿態(tài)之間的控制問題。但如果將遙控器或者地面站已經(jīng)設定好的路徑,功能中蘊含的姿態(tài),如定高、特殊油門、自動起降等等,飛控需要自己完全接管姿態(tài)控制,輸出是為了控制電機轉(zhuǎn)速—針對四旋翼的控制原理就是承兌的電機調(diào)速:
飛控中常用的算法有幾個,例如四軸算法中的PID,智能PID如模糊PID,也有采用LQR,變結(jié)構控制器等等。控制系統(tǒng)結(jié)構上面一般采用閉環(huán)的形式,分出姿態(tài)環(huán)和位置環(huán)進行控制。
那么四軸飛控用的什么算法?
▲四軸飛行器算法主要是濾波算法和姿態(tài)算法還有PID算法。
1.濾波算法主要是將獲取到的陀螺儀和加速度計的數(shù)據(jù)進行去噪聲及融合,得出正確的角度數(shù)據(jù)。主要采用互補濾波或者高大上的卡爾曼濾波。
2.姿態(tài)算法是將獲得的濾波后的傳感器數(shù)據(jù)計算得出飛行器自身坐標系與地理空間坐標系的偏差,即歐拉角。一般采用四元數(shù)算法。
3.PID算法就是用來控制四個電機的轉(zhuǎn)速來糾正歐拉角,從而使機身保持平穩(wěn)。四軸上一般都裝有陀螺儀,他可以測得四軸的實時飛行姿態(tài)。得到這些數(shù)據(jù)后再有微控制器通過PID來調(diào)整四軸的飛行姿態(tài),并達到期望值。
飛行器的姿態(tài)控制是四軸飛行器核心技術所在。其中的PID控制算法相對簡單且技術成熟,是目前控制算法中的首選。PID算法即是PID控制器的靈魂,其對多旋翼飛行器很重要。那算法自己學習能學會嗎?
因為四軸主要分為硬件驅(qū)動部分,和算法部分。算法部分主要是三個,第一個是濾波技術,需要用在姿態(tài)數(shù)據(jù)處理,ahrs算法解算姿態(tài),再就是pid這里pid一般用雙環(huán)串級pid,單級的缺點很多。
其實想做到這一步還需要有不錯的C語言基礎以及扎實的調(diào)節(jié)驅(qū)動能力以及算法的參數(shù),另外調(diào)節(jié)pid也是和有技巧的,建議多看看調(diào)節(jié)pid心得,多調(diào)試然后對照別人的理論就會掌握。在一個你需要做的就是掌握pcb的制作,會使用ad軟件,這是pcb的入門,花幾塊板子練一下手,然后就可以制作飛控主控版了。
說的倒是很輕松,現(xiàn)實是需要花很多時間在算法的更新、系統(tǒng)級設計與優(yōu)化。現(xiàn)在網(wǎng)上已經(jīng)有很多開源程序,自己有動力制作的話要做出來不難,但是想要做好就很難了,簡單的飛行器,購買硬件、組裝、開源代碼等都能解決,難就難在調(diào)試,調(diào)試出適合的參數(shù)來保證飛機調(diào)整各種姿態(tài)的時候響應速度都要恰好,這都是需要大量數(shù)據(jù)的積累和成功案例的借鑒學習。
全面的理論知識與實物操作的四驅(qū)飛行器教學視頻,去哪找呢?
電子發(fā)燒友學院向你推薦《張飛四旋翼飛行器》視頻課程。本課程是張飛老師結(jié)合自己十多年的研發(fā)經(jīng)驗,基于“無人機”實物上用“視頻教程”的方式來詮釋軟硬件開發(fā)的核心技術,在開源的基礎上進一步的把軟件代碼一行行一步步實現(xiàn)的原理,馬達驅(qū)動的控制,硬件電路圖的構思與繪制,PCB板layout的過程與細節(jié),另外還把自身多年研發(fā)經(jīng)歷中遇到的坑,用視頻的方式傾囊講述。內(nèi)容邏輯清晰,通俗易懂。讓新手也能做一個完全屬于自己的軟硬綜合項目。
-
傳感器
+關注
關注
2564文章
52724瀏覽量
764723 -
控制器
+關注
關注
114文章
17026瀏覽量
183310 -
四旋翼飛行器
+關注
關注
18文章
76瀏覽量
40629
發(fā)布評論請先 登錄
小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關教程)
小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關教程)
小型飛行器專用 AS-DR01模擬信號AI識別跟蹤模塊


激光毀傷系統(tǒng):低空飛行器的 “隱形獵手”
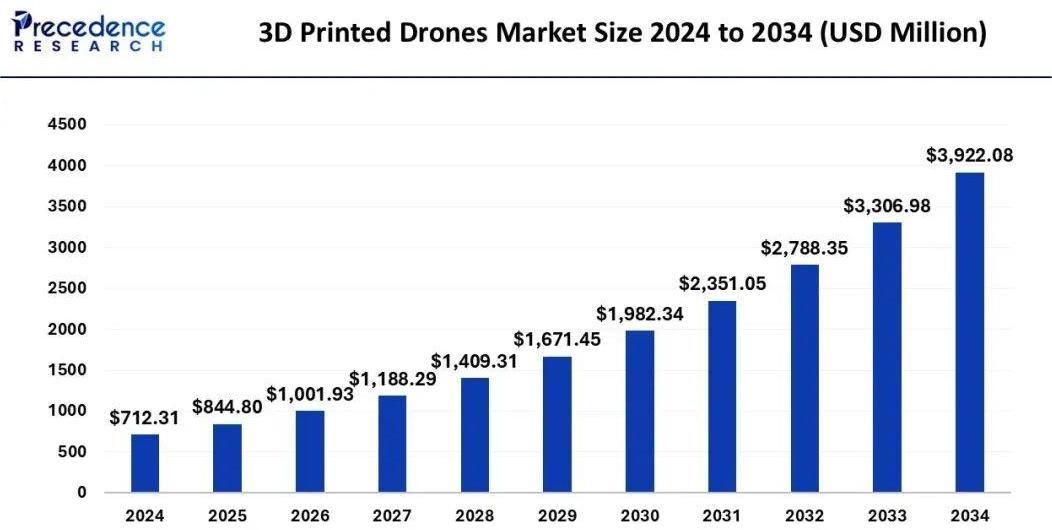
未來十年3D打印無人機市場規(guī)模及預測
MATLAB在低空飛行器中的應用


掌握EMC核心知識——7天倒計時!

零重力飛機工業(yè)完成超億元A+輪融資
欣旺達:已具備低空飛行器電池研發(fā)生產(chǎn)能力
為何無人機領域廣泛采用PX4作為核心控制平臺

開源項目!DIY了一臺無人機,用全志T113芯片
利用圖像處理板避障 讓小型飛行器像昆蟲一樣靈巧





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論