") 介紹無人機自動識別、定位和壓制系統(tǒng)的分析和應用
介紹無人機自動識別、定位和壓制系統(tǒng)的分析和應用
跳頻擴頻無人機
(1) 檢測、識別和分析
監(jiān)測無人機的無線電控制鏈路,以便檢測所關注區(qū)域內(nèi)的威脅。監(jiān)測操作人員借助一些調(diào)制參數(shù)和跳頻參數(shù)(例如,跳頻長度、跳頻速率、調(diào)制類型、符號速率),識別目標 RC 鏈路。監(jiān)測無人機主要包括如下內(nèi)容:
在周圍環(huán)境中檢測 RC 鏈路。
在密集信號區(qū)(WiFi、藍牙)從其他信號中分離目標 RC 鏈路。
測量跳頻參數(shù)。
識別具體 RC 鏈路類型。
為了檢測天線附近所有激活的 RC 信號,初步任務是監(jiān)測相關 ISM 頻段。寬帶( 高達 80 MHz)監(jiān)測,將有利于建立所有由 RC 使用頻率的完整列表,確保獲得較高截獲概率 (POI)。檢測到的信號可以在線分析(例如,如果懷疑是直接威脅),或記錄下來離線分析,以便測量跳頻參數(shù)。如果要確定新的或未知的無線電控制發(fā)射信號配置文件,這是先決條件。
羅德與施瓦茨公司的多信道信號分析解決方案擁有強大的短時間檢測器,可在寬帶信號場景自動檢測和分析頻率捷變短時間信號。對檢測到的跳頻信號自動分析、分類和匹配發(fā)射系統(tǒng)配置文件。此短時間信號檢測器經(jīng)過專門優(yōu)化,可檢測 2.4GHz ISM 頻段跳頻信號。只要它開機(甚至在起飛前),可立即檢測并識別無人機的無線電控制信號。因此,任何需要的對策可馬上部署,沒有絲毫延遲。通過信號分析提供的這種獨特能力明顯優(yōu)于其他解決方案(即,雷達、光、聲)。

采用跳頻參數(shù)直方圖結(jié)果的短時間檢測(即,持續(xù)時間、符號速率、調(diào)制等)。使用配置文件分離或自動分離,識別不同無線電控制鏈路。
進一步分析檢測到的跳頻,確定每一跳的相關技術參數(shù)(例如,持續(xù)時間、帶寬、電平、調(diào)制、符號速率)。從而能對短時間發(fā)射進行分類。觀察統(tǒng)計直方圖顯示的結(jié)果,操作者可對寬帶信號場景中,所有檢測到的 RC 鏈路有全面了解。配置文件分離功能能夠在線分離和識別已知和未知的 RC 發(fā)射機。分離器按照測量獲得的這些跳頻信號的技術參數(shù),如持續(xù)時間、調(diào)制類型和調(diào)制參數(shù),過濾和分類跳頻信號。用戶可以用 RC 發(fā)射系統(tǒng)的相關技術參數(shù),定義這些系統(tǒng)的配置文件。對于每一組跳頻信號,分離器會自動與用戶定義的配置文件進行比較和匹配,這些配置文件符合該跳頻的各項參數(shù)。使用配置文件觸發(fā)功能,根據(jù)用戶定義的規(guī)則,生成自動處理流程。一旦目標 RC 被確定,觸發(fā)自動報警,立即通知操作員存在目標 RC,從而發(fā)出所關注區(qū)域?qū)⒂袩o人機活動的預先警告。
為了分析未知/新無人機通信信號,必須使用我們專門用于頻率捷變傳輸?shù)脑敿毤夹g分析軟件。它提供針對所確定技術參數(shù)的時間/頻率域信號分析、定時分析和調(diào)制分析。可根據(jù)測量到的參數(shù),定義新的分離/識別和對策處理配置文件。
(2) 測向
為了應對無線電控制無人機,了解無人機的到來方向和駛?cè)シ较颍踔潦橇私膺h程控制它的操作人員的位置非常有幫助。無線電控制無人機的測向和/或定位由高性能移動或固定測向機執(zhí)行。信號被非常靈敏和精確的測向天線捕獲,由于含有大量天線單元,該天線具有高抗反射能力。信號測向可在高達 6 GHz頻率范圍內(nèi)進行。
寬帶測向機用于獲取所有并發(fā)相關 RC 跳頻信號的方位角。借助快速測向掃描,能夠以準同步方式,測向幾個頻率范圍內(nèi)的多個目標。智能圖形用戶界面以用戶友好的操作方式,連接和發(fā)送測量結(jié)果到其他系統(tǒng)。可提供用于移動和便攜操作的緊湊型測向天線,也可提供固定測向天線。
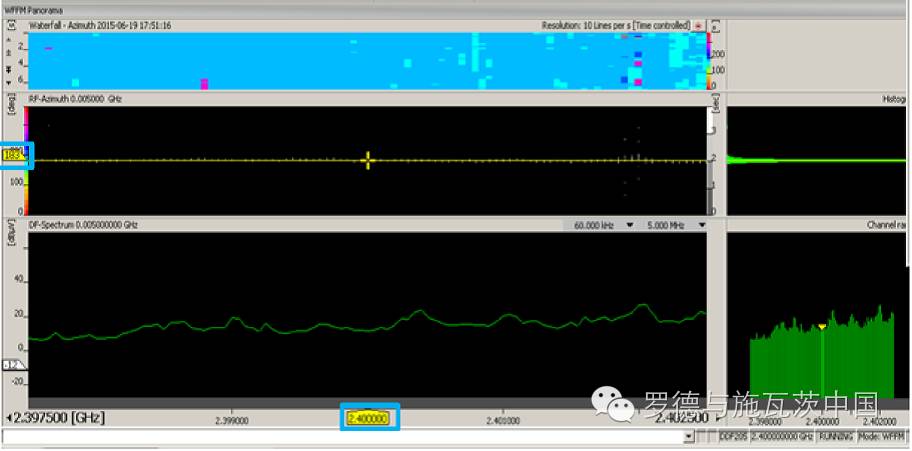
RC 測向結(jié)果顯示無人機出現(xiàn)在183°方向上。位于中心(射頻-方位角)的圖顯示對來自相同方向各個跳頻的測向結(jié)果。
(3) 干擾
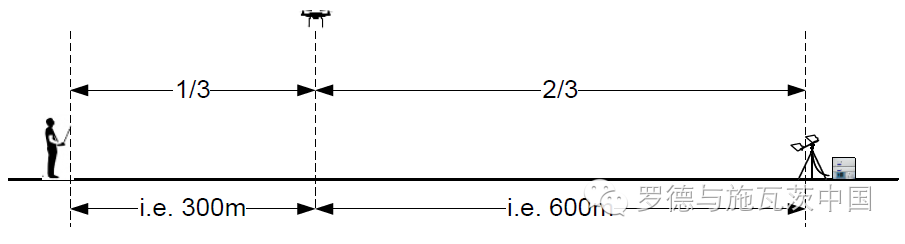
有效干擾 RC 鏈路會有各種后果,例如:強制其降落到地面,通過重新編程使其降到固定位置,迫使它受控著陸,或者最終導致激活“返回到原點”模式。干擾的主要目的是致使目標 RC 鏈路斷開或至少是強烈干擾目標 RC 鏈路,以便癱瘓對手的通信和瓦解任何進一步的敵對行動。高效的羅德與施瓦茨公司跟隨型干擾儀與寬帶干擾儀(例如,非應答型阻塞干擾儀)相比所需功率低得多 。采用這種低功率方法,在直視條件下,可以在離開遠程控制點 2/3 距離處成功實施干擾。
成功干擾 RC 鏈路
成功干擾 RC 的關鍵是事先進行了全面搜索。使用干擾系統(tǒng)的用戶知道含潛在威脅的 RC 鏈路(跳頻擴頻)列表,該列表中包括這些 RC 鏈路的主要調(diào)制參數(shù)(例如,跳頻集合/頻率、定時、跳頻速率、信道帶寬、調(diào)制類型、符號速率)。該干擾儀是特別定制的,最適合用于對抗無人機。在這種對抗應用中跳頻的每一跳都包含該無人機的 RC 信息,都必須被干擾。
取代需要高得多的發(fā)射功率的阻塞干擾,由羅德與施瓦茨公司提供的獨特解決方案基于“跟隨型”干擾模式,在這種模式中,RC 信號的每個信號突發(fā)都會被干擾,但是其他合法信號不會受到影響。從而實現(xiàn)干擾目標 RC,同時對相同頻段內(nèi)的其他通信信號(例如,WLAN 通信/ WiFi 通信)幾乎沒有干擾。在無人機干擾中,定時是非常關鍵的指標。一旦在實時帶寬內(nèi)檢測到目標 RC 鏈路,激勵器響應必須足夠快,以便無人機還在空中時擊中跳頻信號。羅德與施瓦茨公司的干擾解決方案能夠檢測到并響應單個激活的脈沖突發(fā)。一旦下一跳激活,該系統(tǒng)立即在 80 MHz 實時帶寬內(nèi)檢測到它,并相應地做出響應。所有檢測到的發(fā)射和每次干擾發(fā)射都顯示在統(tǒng)計圖中,并可在另外的射頻頻譜中觀察到。
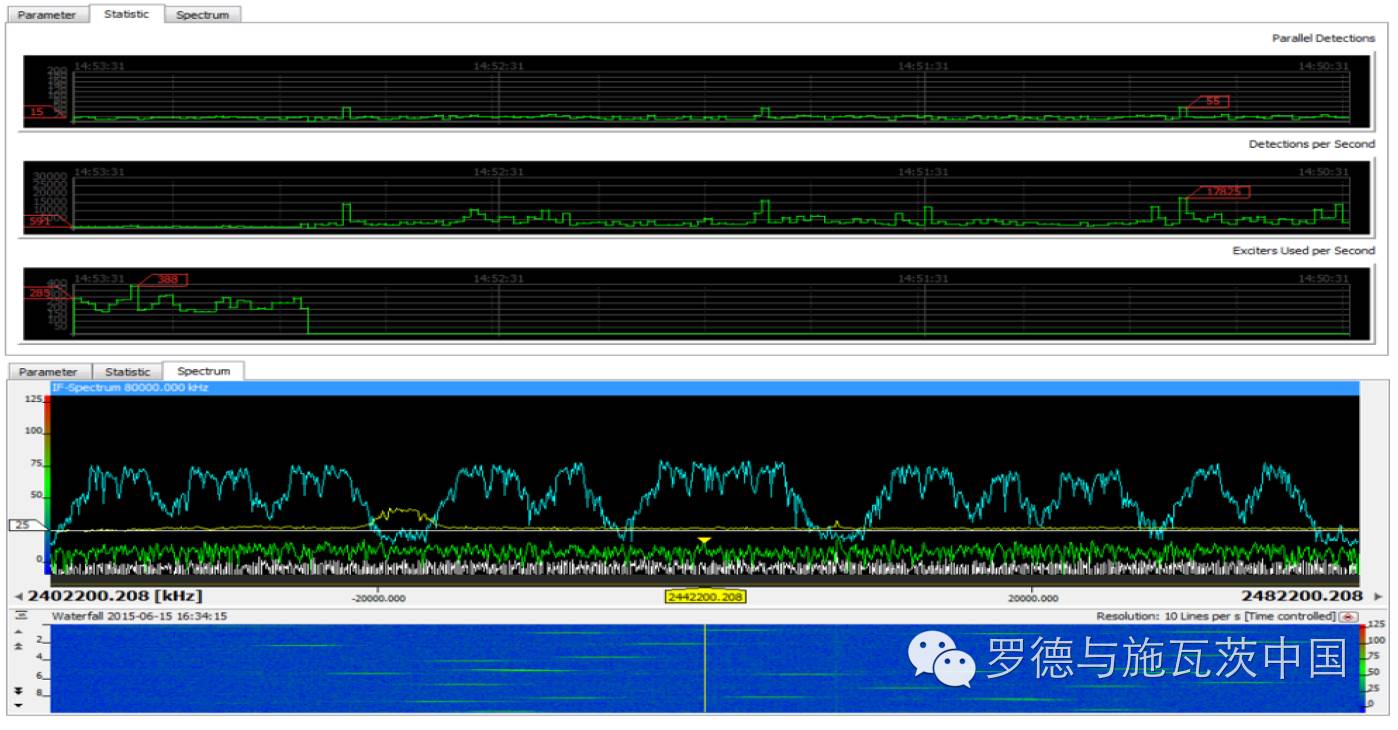
統(tǒng)計標簽:顯示檢測到的輻射和激勵器活動;頻譜標簽:帶激活跳頻擴頻信號的射頻頻譜。
5. 總結(jié)
隨著民用和商用無人機應用的快速普及,迫切需要對其進行監(jiān)測和應對措施的解決方案。我們的目標是提供既能應對日益增長的挑戰(zhàn),又能滿足無線電控制無人機監(jiān)測領域需求的一體化解決方案。戰(zhàn)略解決方案從檢測、識別、分析、測向到以高效和有效的方法對抗無人機測量。
-
自動識別
+關注
關注
3文章
223瀏覽量
22906 -
無線電
+關注
關注
60文章
2150瀏覽量
116872 -
無人機
+關注
關注
230文章
10540瀏覽量
182803
發(fā)布評論請先 登錄
相關推薦
無人機自動巡檢系統(tǒng)功能與應用
無人機自動巡檢系統(tǒng)技術革新與應用前景
無人機防御系統(tǒng)如何提高無線電反制的效果
智能化升級:機載無人機攝像頭如何自動識別目標?

光伏無人機自動巡檢系統(tǒng)的優(yōu)勢價值
基于深度學習的無人機檢測與識別技術
無人機主動防御系統(tǒng)有哪些
無人機自動巡檢系統(tǒng)的興起
無人機飛行中定位誤差的影響探究





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論