 關于輪邊電驅動來提升動力性能的方法研究
關于輪邊電驅動來提升動力性能的方法研究
在汽車上應用輪邊電驅動可提升整車空間利用率和動力性能。在MEHREN研究項目框架內對該類驅動方式的潛力進行了全面評估。大陸公司,福特公司,Schaeffer公司和德國亞琛工業大學等合作單位相應公布了其試驗研究成果。
1汽車方案
電動車通常被視為一類關鍵的交通運輸技術,目前采用輪邊電驅動可通過將驅動單元移至輪輞中以改善整車空間利用率,并且可預先確定單個車輪扭矩的附加自由度,同時提升了其駕駛靈活性和行駛安全性。由大陸公司,福特公司,謝弗公司和德國亞琛工業大學等單位合作開展的MEHREN(具有最高整車空間利用率和能量利用效率以及高行駛安全性的多電機電動車)研究項目全面地揭示了此類驅動技術的潛力。
為了研究輪邊驅動對整車空間利用率的影響,選用福特公司的Fiesta轎車(2013年度車型)為基準車型,緊接著又開發了一款新車型,其在保持乘客艙和貨艙位大小以及行駛功率和被動安全性不變的情況下盡可能獲得更為緊湊的外形尺寸。
與基準車型相比,新車型的長度總共縮短了250 mm,從而達到了典型A級車的水平,同時顯著改善了整車空間利用率。盡管集成了一個具有40.8 kW·h能量儲備的動力電池,但是通過應用一種階梯形多層地板,汽車高度的增加被限制在27 mm。這種輪邊驅動單元布置于后橋上,并能提供數值為810 N·m的最大扭矩,此時驅動單元的幾何尺寸要求使用177.8 mm×457.2 mm的輪輞。圖1示出了基準車型與新開發車型的尺寸比較。
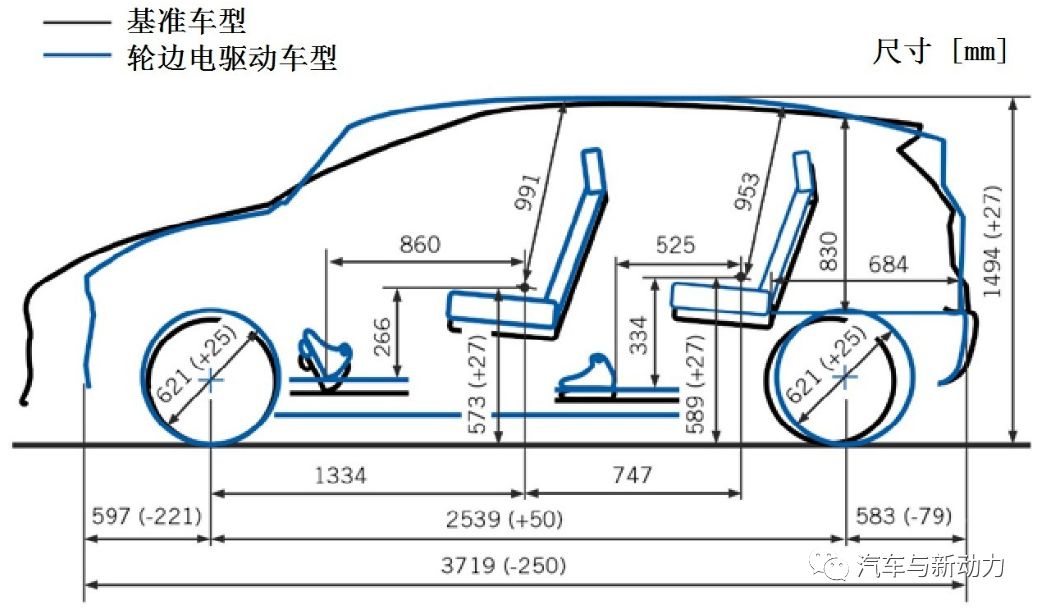
圖1 基準車型與輪邊電驅動車型的尺寸比較
2技術載體
該研究項目以福特公司Fiesta轎車為基礎開發和建造了兩種技術示范車型,其可將輪邊電驅動單元集成在現有的汽車結構中(圖2)。
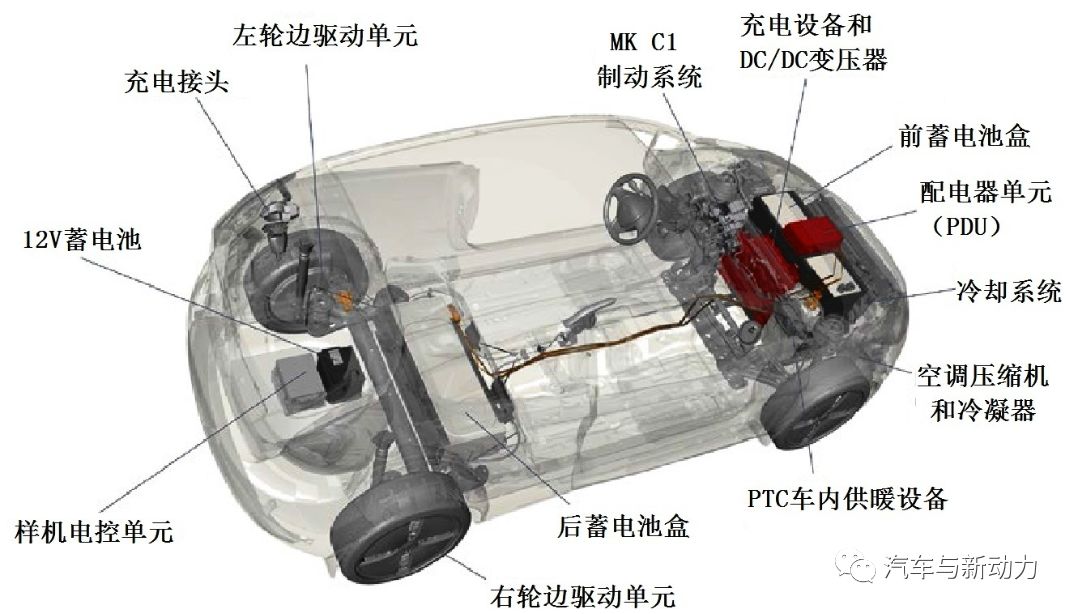
圖2 以FordFiesta轎車為基礎的技術載體
正如上述方案,兩種示范車型選擇了兩個安裝在后橋上的輪邊電驅動單元的驅動方案。其與輪邊驅動相結合提供了更顯著的技術優勢:由于負荷位移到制動器位置上,對后橋的制動力要求明顯小于前橋,因此在后橋上可使用較小的制動力,而且后輪上車輪導向系統的鉸接點位置布置需進行調整,以便給電機提供更大的結構空間,就如整車前橋一樣,從而可獲得所必需的轉向機構運動學。除此之外,在后橋上由輪邊驅動所能改善的滑轉調節在行駛動力學和行駛安全性等領域取得了顯著的改善。
采用了一種利用模擬器進行反饋的線控制動單元作為制動系統(大陸公司MK C1),其可將駕駛員的制動要求通過所有4個車輪上摩擦制動的可變控制附加轉換到電機的扭矩上。
3輪邊驅動裝置
該研究項目所開發的輪邊驅動裝置的結構如圖3所示。其可用作直接電動驅動(E-WD)裝置,除了電機外車輪中還集成了功率電子器件、控制單元和摩擦制動器。
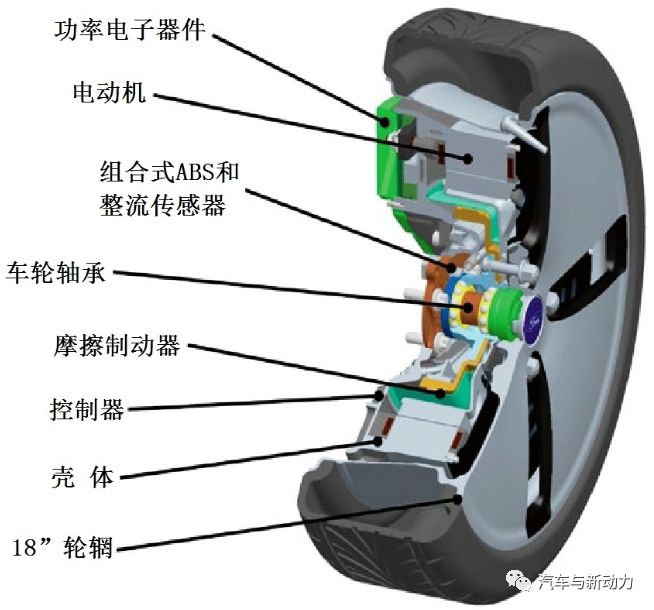
圖3 schaeffler公司輪邊驅動裝置剖視圖
采用永磁鐵進行勵磁的同步電機能獲得較高的功率密度和緊湊的外形尺寸。其內轉子的結構型式簡化了驅動單元的密封效果,并改善了摩擦現象,因為其只需相對較小的直徑。
將空氣隙保持在較窄的公差范圍內對于驅動裝置運行的扭矩、功率和效率具有重大意義,同時需防止在轉彎時出現的傾斜現象而使定子與轉子接觸,該問題可通過基于批量生產工藝技術的剛性的車輪軸承結構來解決。
整個驅動裝置需進行有效冷卻,以便能實現所需的高功率密度。冷卻液首先流經電子器件,緊接著流經電機定子。目前集成的鼓式制動器與輪輞一樣采用螺栓連接。
4行駛動力學調節
與量產汽車相比,使用輪邊驅動能采用新型的縱橫向動力學調節方式,目前已開發了一種全新的行駛動力學調節方式,其可按照駕駛員和輔助系統提出的運動要求以實現穩定、可靠和高效的能量轉換。同時與傳統的動力學調節方法相比,尤其是在各個執行器之間分配調節參數方面會產生決定性的變化。與調節系統相比的另一個區別是車輪穩定性轉速窗口調節的轉換,可直接在輪邊驅動控制器上得以實現。
通過將調節系統分成多個邏輯上分開的并具有明確定義接口界面的層面,成功地實現了控制元件與執行機構的分離。系統的改變或補充可以此簡單而有效地得以實施。
行駛動力學調節的結構由下列3個層面組成(圖4):
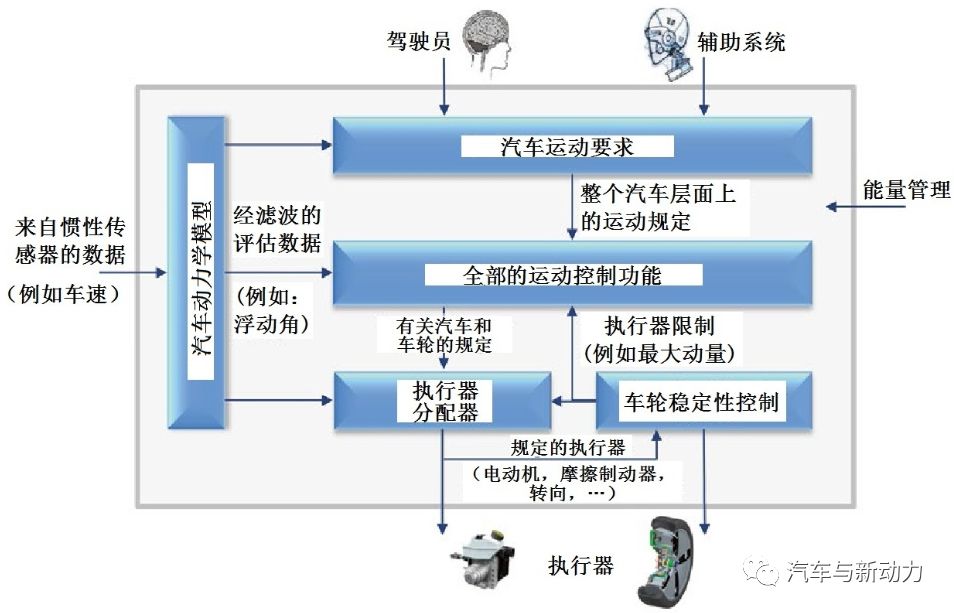
圖4 行駛動力學調節
(1)在要求層面(“汽車運動要求”)上接受駕駛員(或輔助系統)的控制規定,所有的要求被換算成額定運動參數,并進行判斷,然后傳遞到下一個層面;
(2)在調節功能層面(“全部的運動控制功能”)上執行功能,它們根據執行器在縱向、側向(有時也可能垂直)方向上操縱汽車運動;
(3)在控制層面(“執行器/分配器”和“車輪穩定性控制”)上從與汽車有關的調節矢量查明用于各個執行器的調節量,分配到執行器上的是一個永遠能在調節范圍內解決的優化任務。
同樣也屬于控制層面的車輪穩定性功能負責實現目標轉差率或者調整和優化在驅動及制動時的車輪扭矩或轉速。此外,輪邊驅動還具有十分重要的優點,電機的扭矩可以無機械滯后的狀態直接作用于車輪,因而能非常迅速和精確地進行調節,以此可同樣精確地調節車輪轉差率。該功能是在“轉速窗口調節”軟件模型中實現的,而且由輪邊驅動單元分別調節各自車輪的扭矩。通過由制動電控單元預先規定的轉差率連續地跟蹤車輪的打滑極限。
圖5示出了用于制動運行的轉速窗口調節功能及其與傳統的液壓制動系統防抱死制動系統(ABS)調節的對比,以此可在一定的轉差率下實現最大的制動力。為了使汽車盡快地減速,必須要將制動力調節到最大值。當然,無論是最大制動力的大小還是最大制動力的滑轉系數都是可調節的,同時其與路面狀況有關。在傳統的ABS調節情況下對由摩擦制動的脈動調節來進行最大制動力的相關試驗(圖5中的棕色曲線)。當輪邊驅動采用轉速窗口調節方式時,可通過改變規定的滑轉系數連續地調節其制動力最大值,并由電機迅速地進行跟蹤調節(圖5中的橙色運行點),以此可有效改善汽車穩定性。
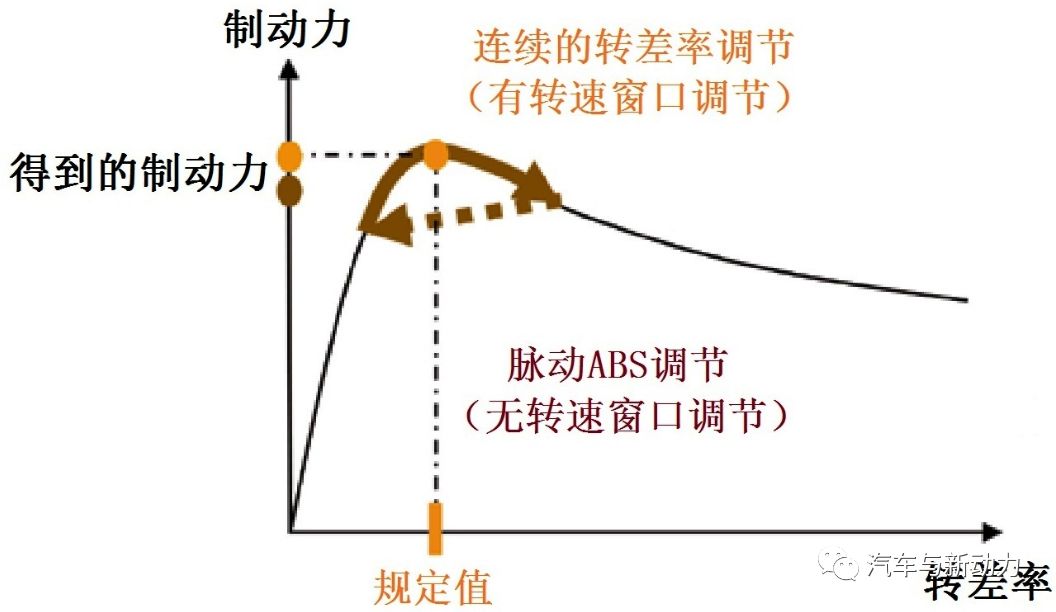
圖5 轉速窗口調節的工作原理(示意圖)
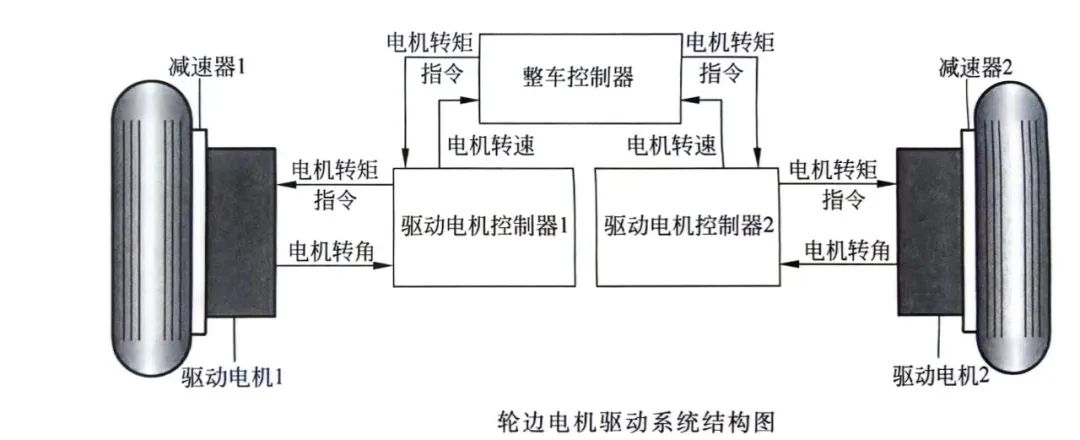
圖6示出了行駛動力學調節的軟件結構,其由分布在3個電控單元中的許多模塊組成,這些電控單元分別由合作單位福特(藍色),大陸(橙色)和謝弗(綠色)公司開發。
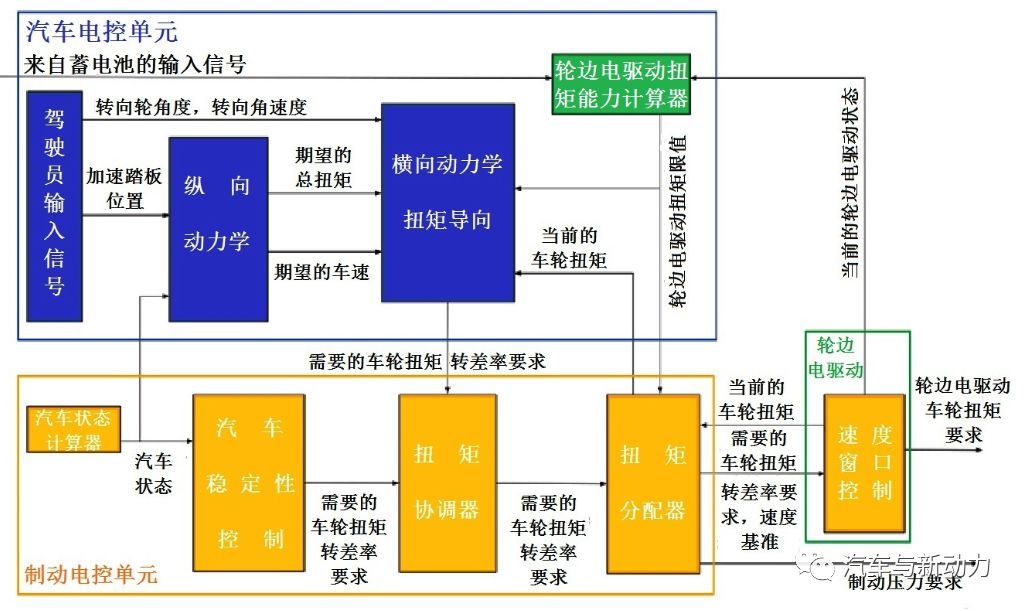
圖6 行駛動力學調節的軟件結構
“縱向動力學”模塊可根據通過加速踏板和轉向輪所接受到的行駛指令而組成的縱向動力學以計算4個車輪上所期望達到的扭矩,再將其傳遞到“橫向動力學/扭矩導向”模塊。該類扭矩導向功能可通過后輪之間制動扭矩和牽引扭矩的分配以獲得最佳的行駛性能。在進行加速時調節扭矩從一個后輪傳遞到另一個后輪上改善了由駕駛員預先確定的行駛軌跡的隨機運動。同時通過轉速窗口調節以限定各個車輪的轉差率,從而將輪胎作用力保持在一個穩定的范圍內,提高了整車靈活性,并使行駛狀況更為穩定,既不會調節過量也不會調節不足。
“汽車穩定性控制”模塊可平行地檢驗當前運動狀況是否超越汽車平穩性極限,如有必要時則還應計算所需的車輪修正扭矩。最佳的車輪額定轉差率的評估也在該模塊中進行。“扭矩協調器”模塊判斷因性能所需的車輪期望扭矩,緊接著產生4個車輪所需的最終扭矩指令。“扭矩分配器”模塊在考慮到由“輪邊驅動扭矩能力計算器”所評定的驅動扭矩限值和再生策略的情況下,為各個車輪分配扭矩及車輪驅動單元與摩擦制動器之間的額定轉差率。“扭矩分配器”使得車輪上的兩個執行器在一起使用的情況下盡可能不產生沖擊作用,并且使其不會超過額定值。
5評估
福特和大陸公司在各種高低摩擦系數試驗路段上對新開發的行駛動力學調節功能進行評估。下文介紹3種臨界行駛機動性的行駛試驗結果,為此應用了分別具有4張曲線圖的插圖予以說明,其通過時間坐標軸示出測量信號,曲線圖選擇了下列4種繪制方式:
(1)上方的曲線圖的繪制始終是來自“輪邊電驅動扭矩能力計算器”模塊的兩個輪邊驅動的最大驅動扭矩和制動力矩以及駕駛員要求的總扭矩;
(2)第二張曲線變化圖表示的是預設的扭矩以及由轉速窗口調節實際提供的扭矩;
(3)第三張曲線圖是示意圖解,包括各個車輪執行器上的摩擦制動系統壓力(其與制動扭矩成正比),為了獲得良好的視野,信號均以相同的尺度標出并采用垂直布置的,此外還為該圖添加了整車加速度信號。其與下方曲線示意圖的繪制相類似,同樣以相同的尺度標出并進行垂直布置,同時示出了車輪速度與汽車基準速度的比對。
6低摩擦系數的ABS制動
圖7中示出的是在結冰的路段上采用直線行駛的制動狀況。若駕駛員操縱制動踏板,并要求采用最大的制動力矩,則不僅會超出制動泵可提供力矩的上限,并且也超出了從車輪傳遞到路面的最大力矩,會使車輪出現嚴重的打滑現象。如果在后輪上由轉速窗口調節功能承擔轉差率調節,而同時在前橋上由ABS調節器承擔轉差率調節,從中即可看出兩種調節器在工作能力方面的明顯差異:前輪因摩擦制動執行器緩慢的物理特性而使得其具備轉差率較大的階段特征,與其相比后輪上的轉速窗口調節卻能進行精確的調節,從而獲得了非常精確的基準速度。
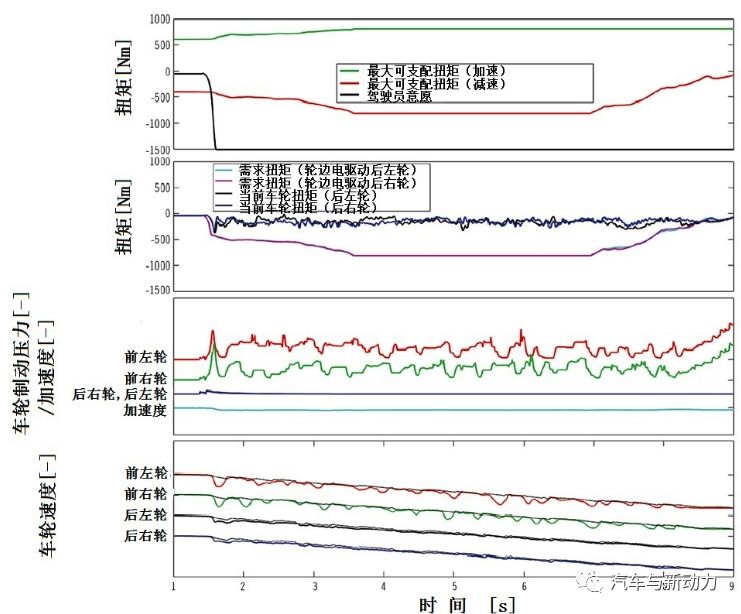
圖7 在低摩擦系數路面上的ABS制動
(下面兩張曲線圖為示意圖)
7摩擦系數從高-低-高轉變的路面上的加速
按照下列試驗情況即可較好地體現出驅動輪滑轉調節(ASR)的效果:駕駛員首先在具有高摩擦系數的路段上加速汽車,然后在具有低摩擦系數的路段上試驗加速過程,再在具有更高摩擦系數的路段上繼續進行加速行駛試驗。在路面摩擦系數從高到低轉變的情況下,驅動輪就會發生滑轉,那么就應采用ASR來防止該類狀況的出現。在摩擦系數轉變(從低到高)時就應借助于ASR進一步使汽車加速性能最大化。
在圖8上由后輪速度曲線上的一個小凸起即可識別出第一次摩擦系數轉變的時間點。轉速窗口調節可使扭矩迅速被調整到可支配的水平上,并使車輪保持最佳的轉差率。加速度信號曲線表明,加速度如無突然性的變化,會使駕駛員感受到舒適的駕乘體驗。
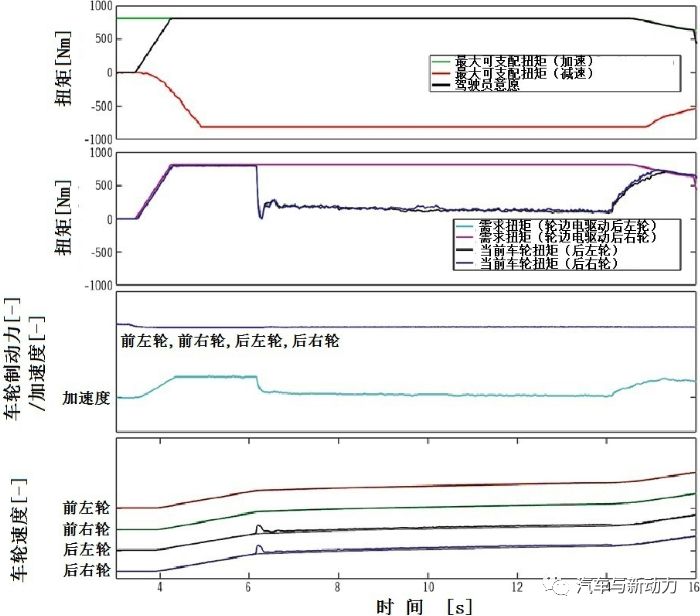
圖8 在摩擦系數從高-低-高轉變的路面上的加速過程
(下方兩張曲線圖為示意圖)
8摩擦系數變化時的行駛性能
行駛動力學調節品質的另一個標準是在摩擦系數交錯變化的路面上使汽車具備優秀的制動性能。若汽車不進行附加調節就會出現較大的偏轉率,同時必須由駕駛員操縱轉向方可使汽車的行駛方向保持不變。該類無法進行控制的偏轉率對整車駕駛是具有一定風險的,其要求駕駛員具有良好的駕駛技巧。現代ABS系統能應對此類挑戰,通過減小偏轉率以輔助駕駛員,并使汽車保持穩定性。
圖9表明在性能標定前(左)后(右)具有相同的靈活性。在第三行曲線圖上采用轉向輪角度傾斜以替代汽車縱向加速度曲線。在標定前駕駛員需采用約270°的補償轉向角以保持汽車穩定性,而標定后則僅需要70°的補償轉向角并附加很小的動態轉向運動。
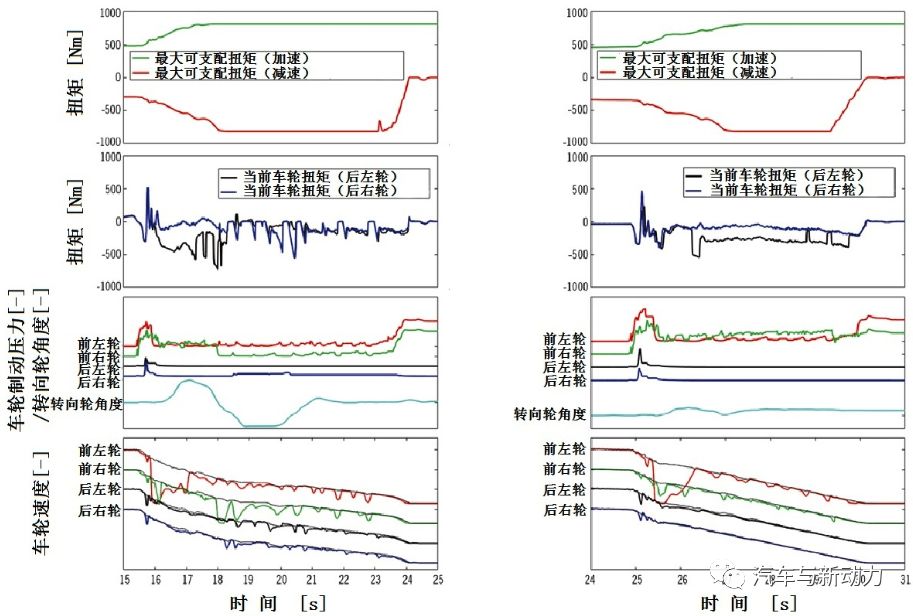
圖9 標定前(左)和標定后(右)在摩擦系數交錯變化路面上的制動
(下方4張曲線圖為示意圖)
9試驗研究結論
總體而言,行駛試驗表明,采用新開發的動力學調節,在提高動力學性能的同時,能明顯改善行駛安全性和操作,此外也證實了在極端條件下實現輪邊驅動的工作能力和可靠性,同時也是該類創新驅動方式未來工業化道路上的一個重要環節。
-
傳感器
+關注
關注
2561文章
52330瀏覽量
762417 -
電動機
+關注
關注
75文章
4146瀏覽量
98093 -
電子器件
+關注
關注
2文章
600瀏覽量
32564
發布評論請先 登錄






 工商網監
工商網監
評論