") 動物在水中有許多創(chuàng)造性的活動方式,而機器人正在“模仿”它們
動物在水中有許多創(chuàng)造性的活動方式,而機器人正在“模仿”它們

動物在水中有許多創(chuàng)造性的活動方式,而機器人正在“模仿”它們。
大多數(shù)水下機器人運動方式是以下這兩種之一:第一種是螺旋槳,第二種是鰭。但是動物告訴我們,水下運動方式還有很多種,可能給機器人帶來獨特的好處。我們看看今年ICRA發(fā)表的兩篇論文,展示了仿生水下機器人以創(chuàng)新的方式移動:一個噴射動力的機器人魷魚可以跳出水面,另一個機器人扇貝可以像真的一樣移動。
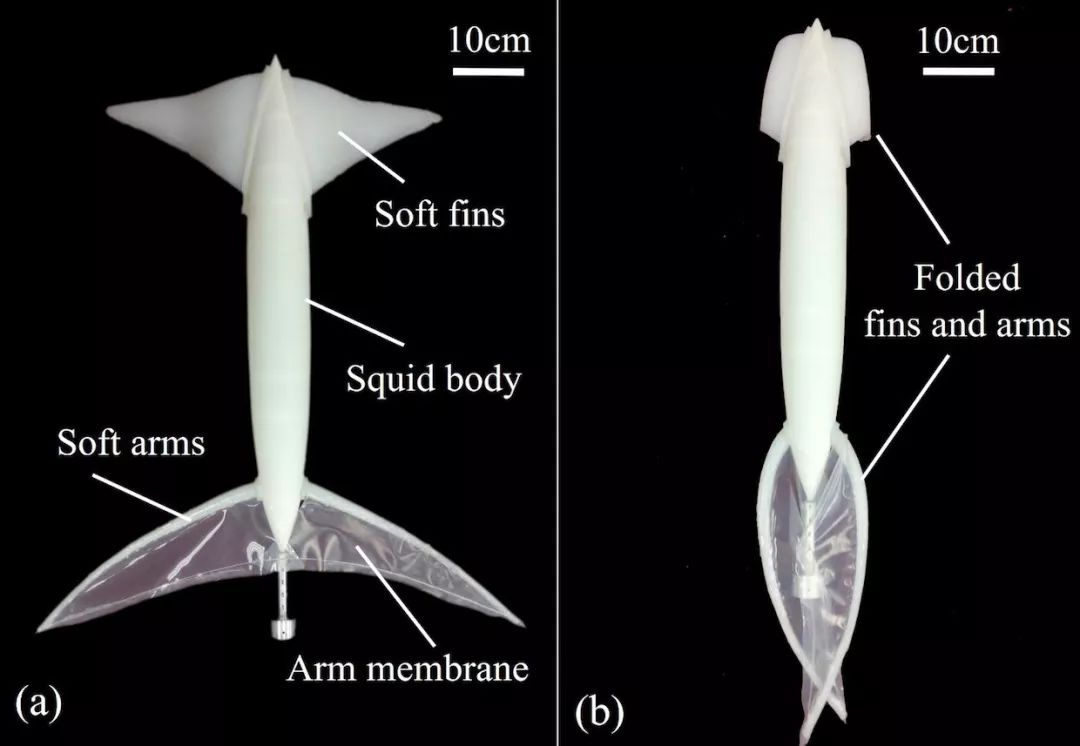
Image:Beihang University
這架來自中國北航大學的“魷魚式水上飛行器”是仿照飛行的魷魚而設(shè)計的。真正的魷魚,除了好吃外,可以利用噴水器推進自己前進。而且噴射器足夠強大的話,一些魷魚不僅可以跳出水面,而且實際上可以通過在空中繼續(xù)噴射來短時間內(nèi)實現(xiàn)受控飛行。飛行階段是通過使用鰭作為手臂和翅膀來產(chǎn)生一點升力來延長的。真正的烏賊使用這種多模態(tài)推進來躲避掠食者,而且速度也快得多——烏賊在空中飛行時可以使正常的游泳速度翻倍,每秒飛行50個身體長度。
魷魚機器人主要由壓縮空氣驅(qū)動,壓縮空氣儲存在鼻子里的圓柱體中(魷魚有鼻子嗎?)鰭和臂由氣動執(zhí)行器控制。當機器人想要在水中移動時,它會打開一個值,釋放少量的壓縮空氣;同時釋放空氣會產(chǎn)生足夠的推力,將機器人魷魚完全從水中射出。
我們被告知機器人烏賊可以通過跳躍在10到20米之間移動,而在水下使用它的噴射器只需要10米。目前,烏賊只能發(fā)射一次噴射器,但研究人員計劃用密度更大的氣體代替壓縮空氣,如液態(tài)二氧化碳,這將允許長時間的操作和多次跳躍。研究人員說,使用鰭進行動態(tài)控制還有很多工作要做,這將“揭示自然飛行烏賊運動的優(yōu)越性”。
來自中國北航大學的Taogang Hou, Xingbang Yang, Haohong Su, Buhui Jiang, Lingkun Chen, Tianmiao Wang,和Jianhong Liang在2019蒙特利爾國際航展上介紹了“帶軟變形鰭和臂的魷魚式水上飛行器的設(shè)計和實驗”。
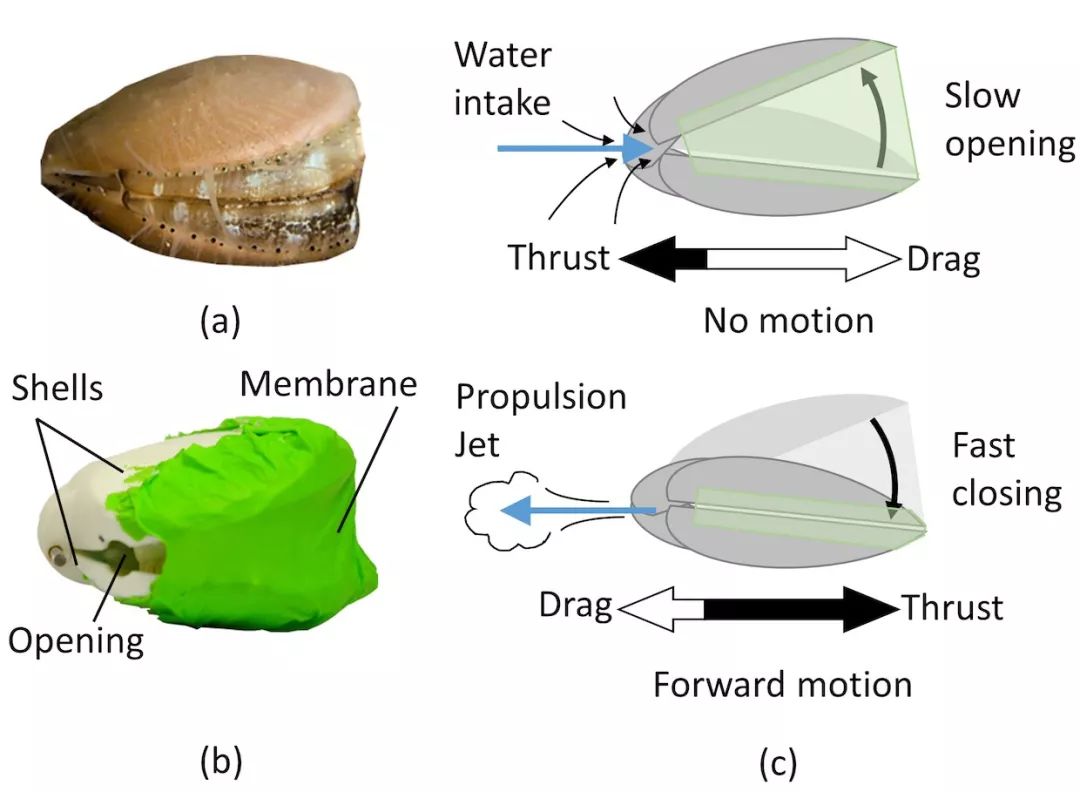
Image: EPFL
機器人扇貝,是一個“Bivalve inspired(雙瓣激發(fā))游泳機器人”,來自Jamie Paik領(lǐng)導(dǎo)的EPFL的可重構(gòu)機器人實驗室。真正的扇貝,除了好吃之外,可通過打開和關(guān)閉貝殼來推動自己,從背后產(chǎn)生水射流。扇貝通過反復(fù)緩慢地打開外殼,然后快速地關(guān)閉,可以產(chǎn)生完全在身體內(nèi)部的向前推力。相對于像鰭或旋轉(zhuǎn)螺旋槳這樣的東西,扇貝是簡單而結(jié)實的,特別是當你縮小比例或開始觀察大量的機器人時。EPFL的研究人員將他們的扇貝機器人描述為“一種對危險或持續(xù)使用具有魯棒性的獨特組合,在精密環(huán)境中安全,設(shè)計簡單。”
機器人扇貝即使在工作時也是安全的。由于機器人將水吸入,然后立即噴射出來,因此其設(shè)計能夠抵抗污染,這在海洋環(huán)境中可能是一個重大問題。機器人扇貝原型重65克,可以每秒16厘米的速度輕快地前進,而拍手(這是實際的技術(shù))的頻率略高于2.5赫茲。雖然機器人扇貝現(xiàn)在還不配備轉(zhuǎn)向功能,但真正的扇貝是可以通過向一側(cè)噴射更多的水來改變方向的,而機器人扇貝也應(yīng)該能夠做到這一點。研究人員還指出,機器人扇貝本身甚至可以兼作鉗子,據(jù)我所知,這卻不是真正的扇貝能做的哦。
-
機器人
+關(guān)注
關(guān)注
213文章
29615瀏覽量
212198 -
水下機器人
+關(guān)注
關(guān)注
2文章
97瀏覽量
13990
原文標題:機器人魷魚和機器人扇貝展示仿生水下推進
文章出處:【微信號:IEEE_China,微信公眾號:IEEE電氣電子工程師】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
盤點#機器人開發(fā)平臺
什么是機器人?追蹤機器人技術(shù)的發(fā)展和未來
工業(yè)機器人4大控制方式,你知道幾種?

名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發(fā)實踐
伺服電動缸在人形機器人中的應(yīng)用
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
《具身智能機器人系統(tǒng)》第7-9章閱讀心得之具身智能機器人與大模型
【「具身智能機器人系統(tǒng)」閱讀體驗】+數(shù)據(jù)在具身人工智能中的價值
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
名單公布!【書籍評測活動NO.51】具身智能機器人系統(tǒng) | 了解AI的下一個浪潮!
工業(yè)機器人常用的編程方式
柔性機器人和剛性機器人有什么區(qū)別?

柔性機器人與剛性機器人區(qū)別與聯(lián)系






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論