 球平衡PID系統的制作
球平衡PID系統的制作
第1步:PCB
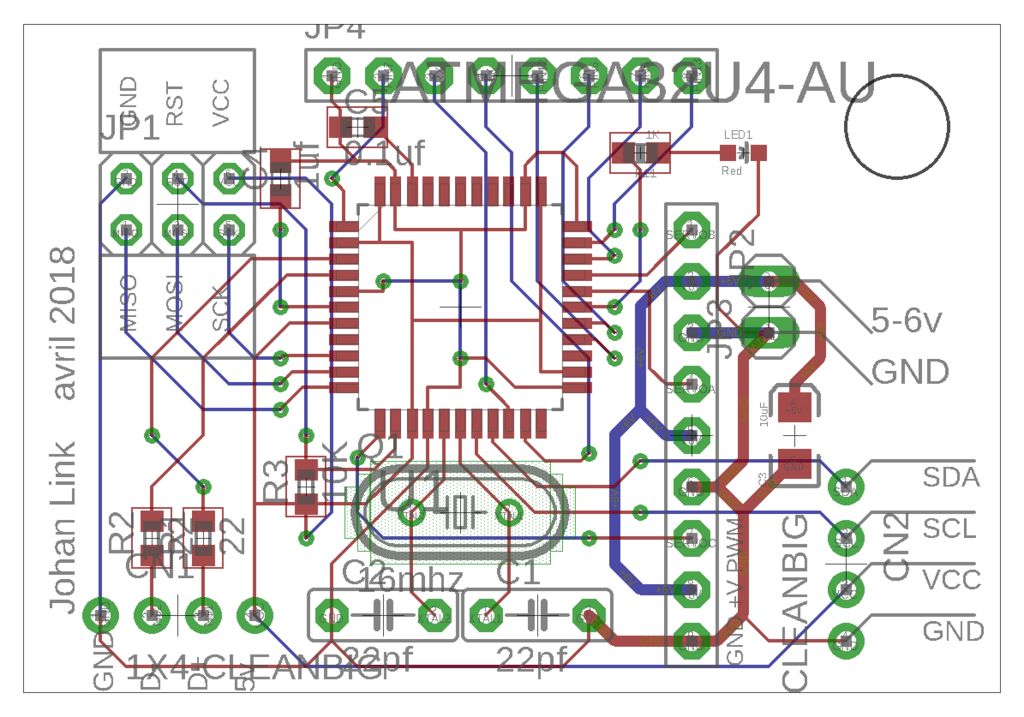
PCB制造
我用 eagle 繪制了pcb,然后PCBWay.com制造了它。
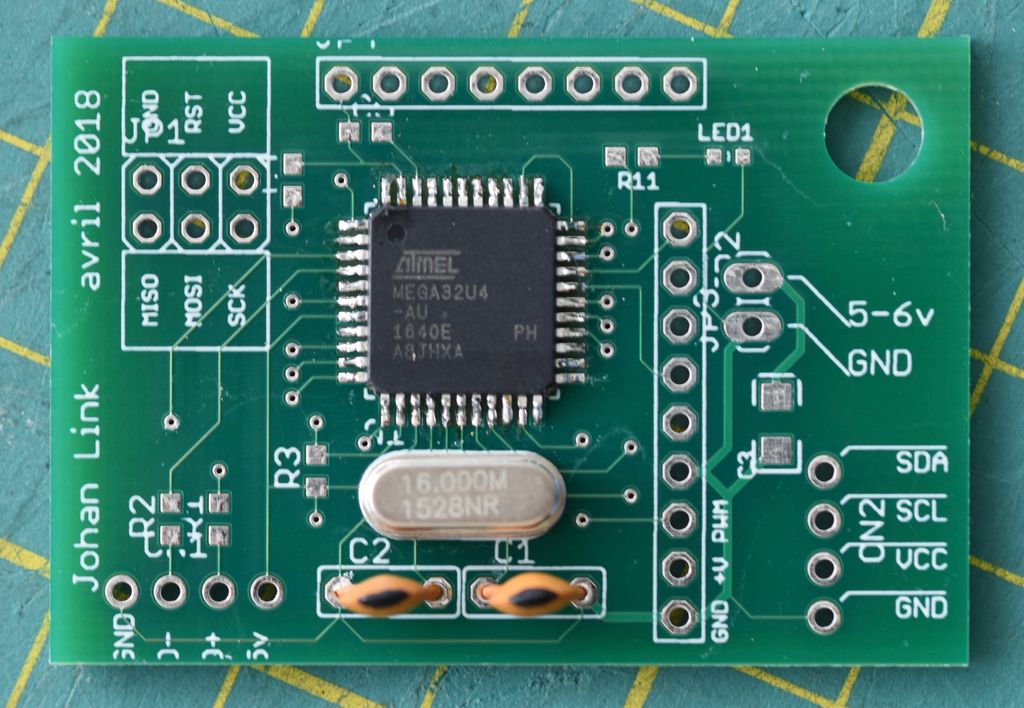
PCB組裝:
我焊接了所有沒有焊劑助焊劑的smd組件。我不建議你像我這樣做。
PCB組件:
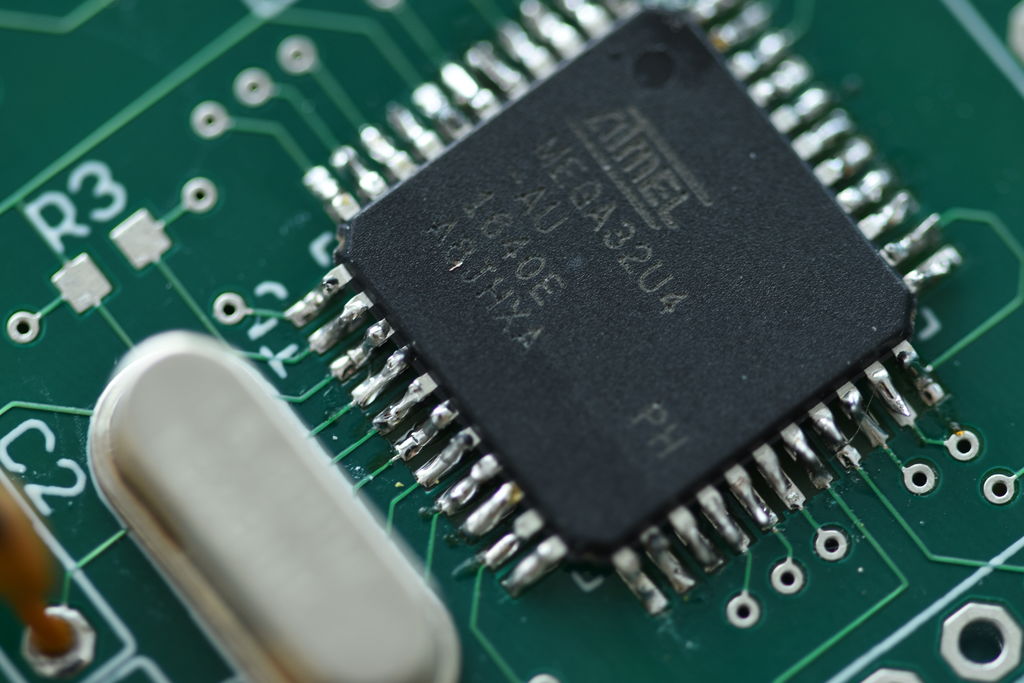
1X Atmega32u4
1X 1uf電容器
1X 0.1uf電容器
1X 10uf電容器
2X 22pf電容器
1X led
1X 10K電阻器
1X 1K電阻器
2X 22電阻器
1X 16mhz Quartz
usb connecto r
power jack
PCB的角色
步驟2:3D打印
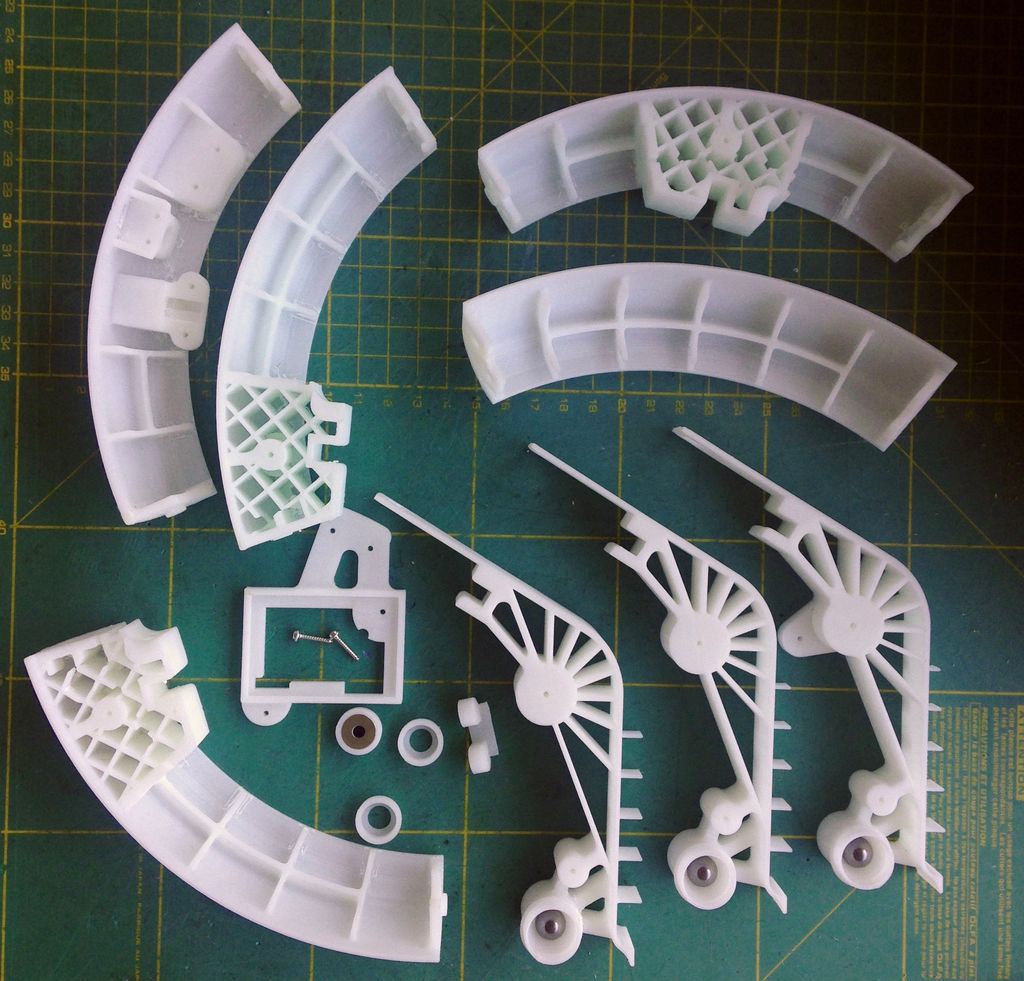
警告: inferieur.stl , superieur.stl 和 plateau.stl 文件不是3D可打印的。 inferieur.stl和superieur.stl由丙烯酸制成。您可以使用CNC制造這些零件,但您也可以在亞克力板上自行切割,因為這些零件的設計并不復雜。 plateau.stl 可以用紙板切割。
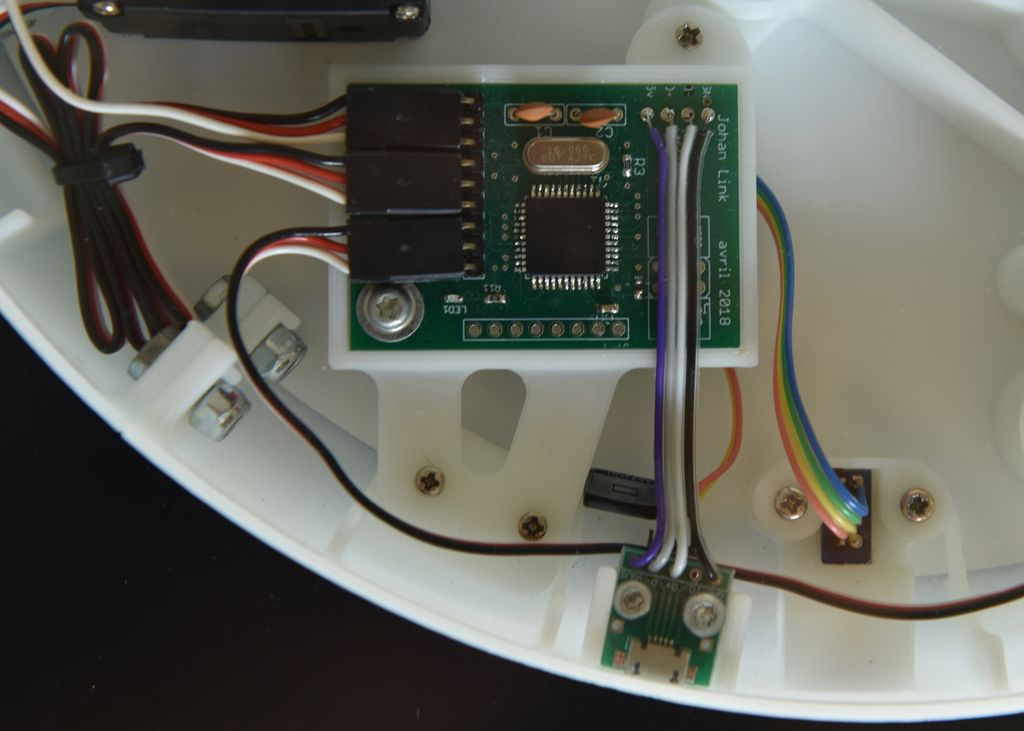
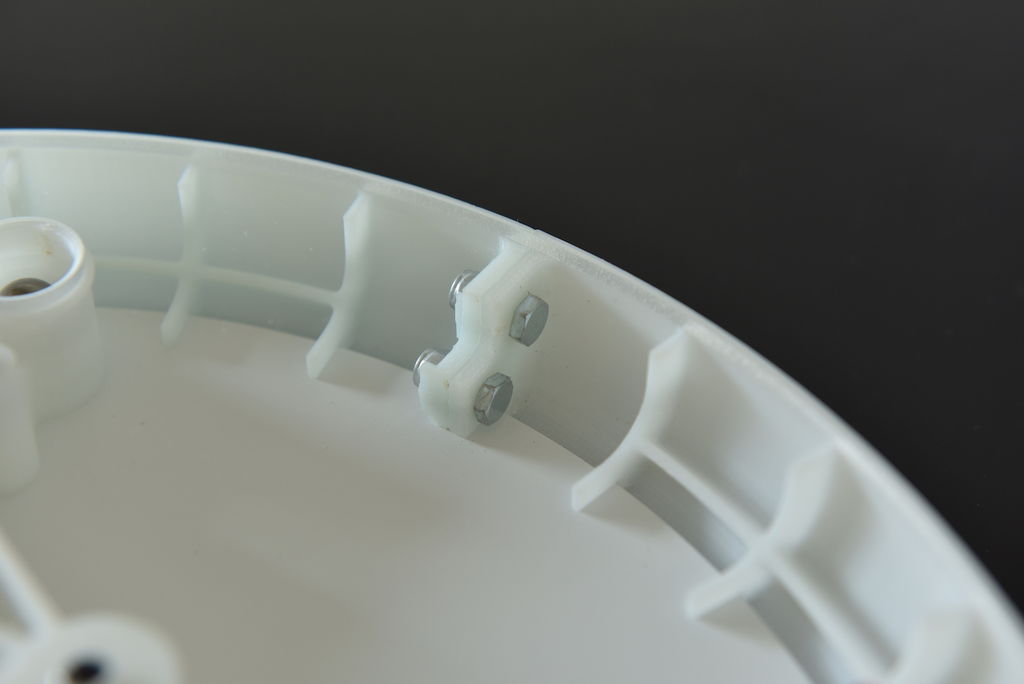
第3步:零件裝配
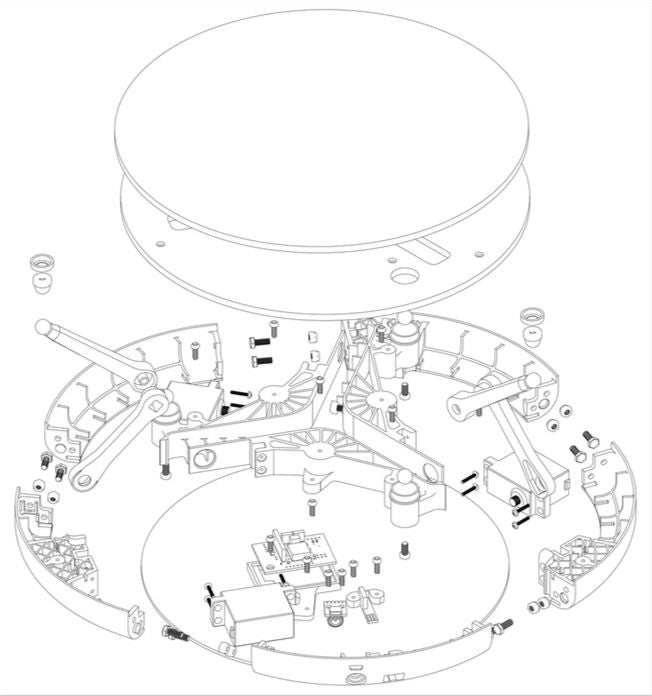



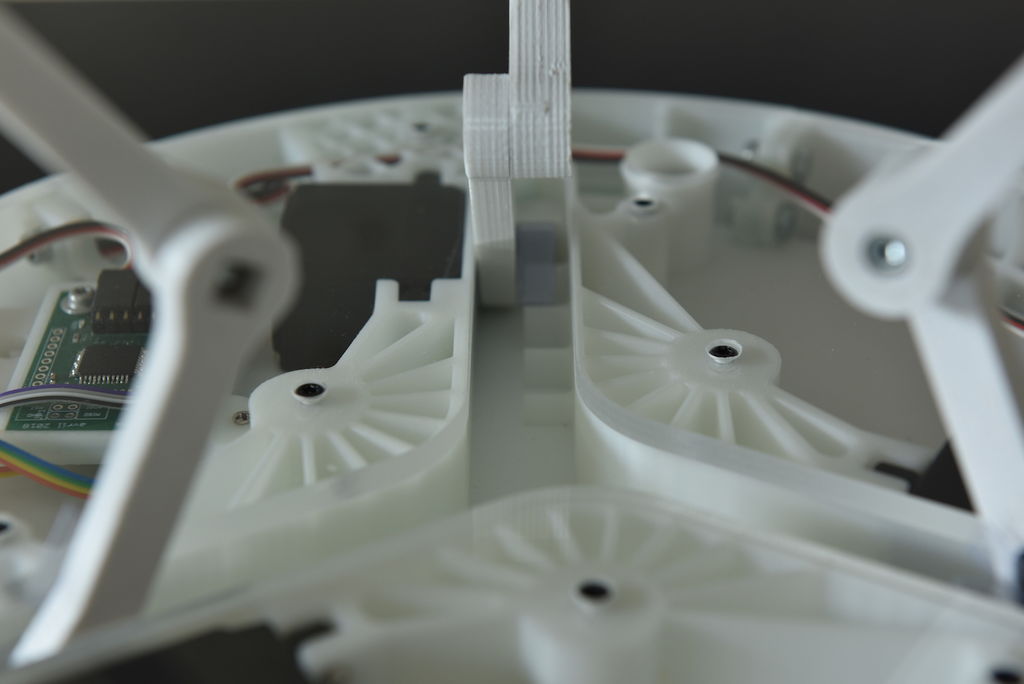
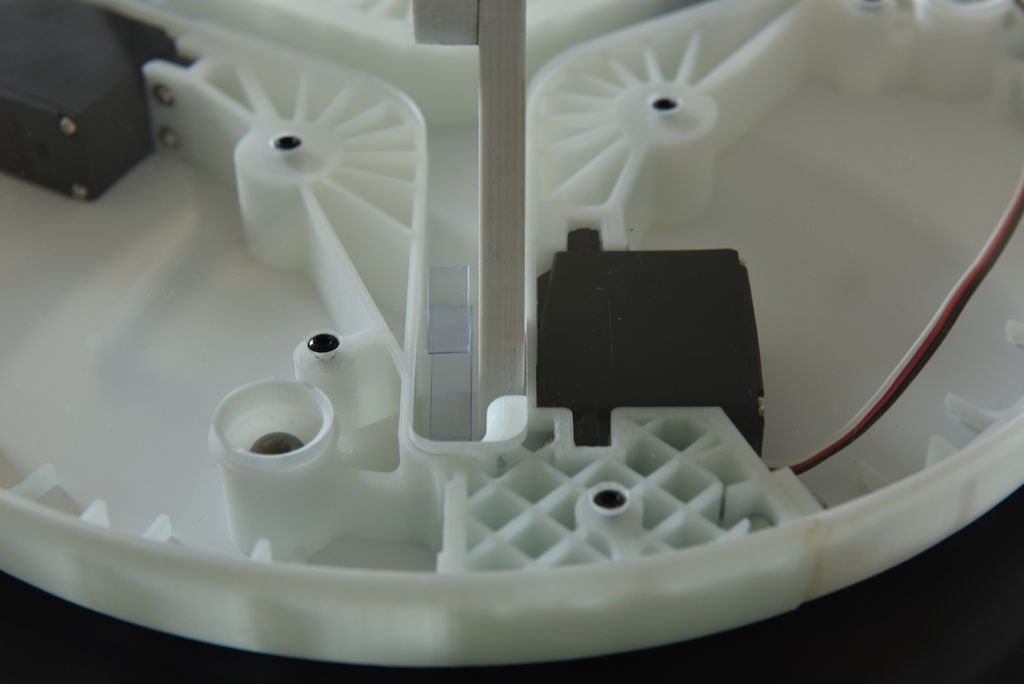




機械部件:
Futaba伺服s3003
磁鐵和球
13X M4 * 10mm螺栓
10X M4螺母
15X
3X M4 * 10mm螺栓
3X M4螺母
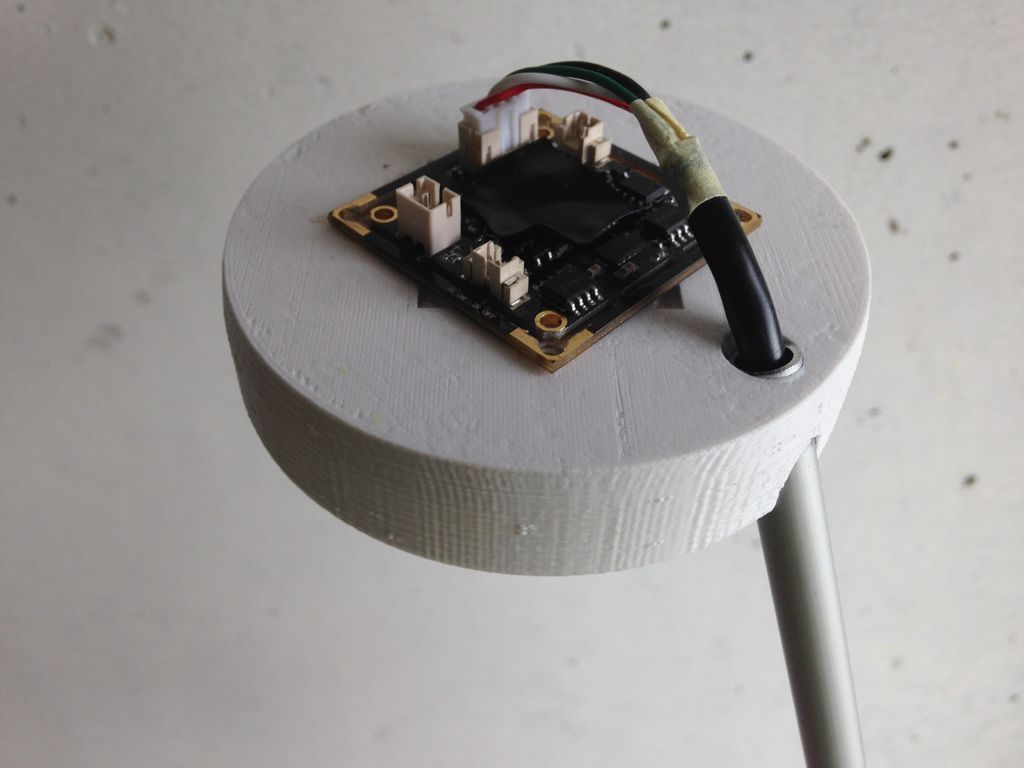
USB網絡攝像頭
鋁管:長474毫米,直徑8毫米
步驟4:PCB編程
PCB包含與arduino leonardo相同的微控制器。因此可以使用Arduino軟件進行編程。代碼可以在這里下載。
在編程PCB之前,你必須刻錄引導加載程序:Arduino作為ISP和Arduino引導加載程序
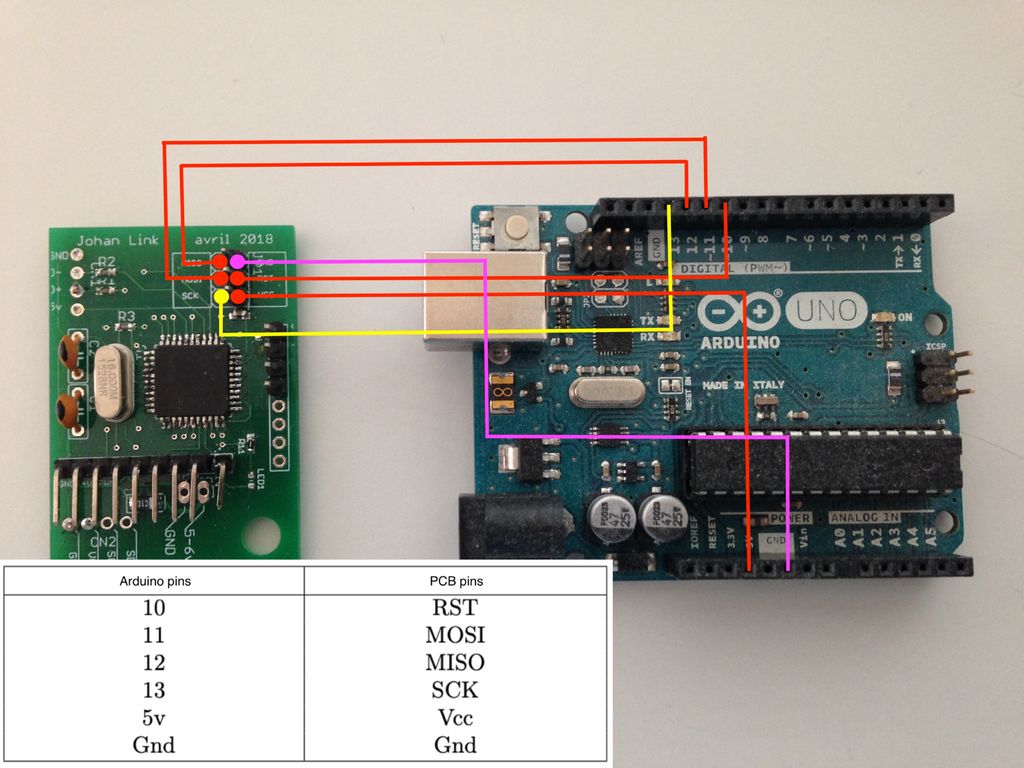
刻錄引導加載程序
你需要一個Arduino
將ArduinoISP草圖(arduino軟件/例子/ArduinoISP)上傳到你的Arduino板上
如圖所示進行連接
從工具》主板菜單中選擇“Arduino Leonardo”。
從工具》程序員
選擇“Arduino as ISP”
運行工具》刻錄引導程序
此過程可能需要幾分鐘。
斷開所有電纜。
完成此步驟后,您必須使用USB電纜將pcb連接到計算機并上傳此代碼。
步驟5: Python程序

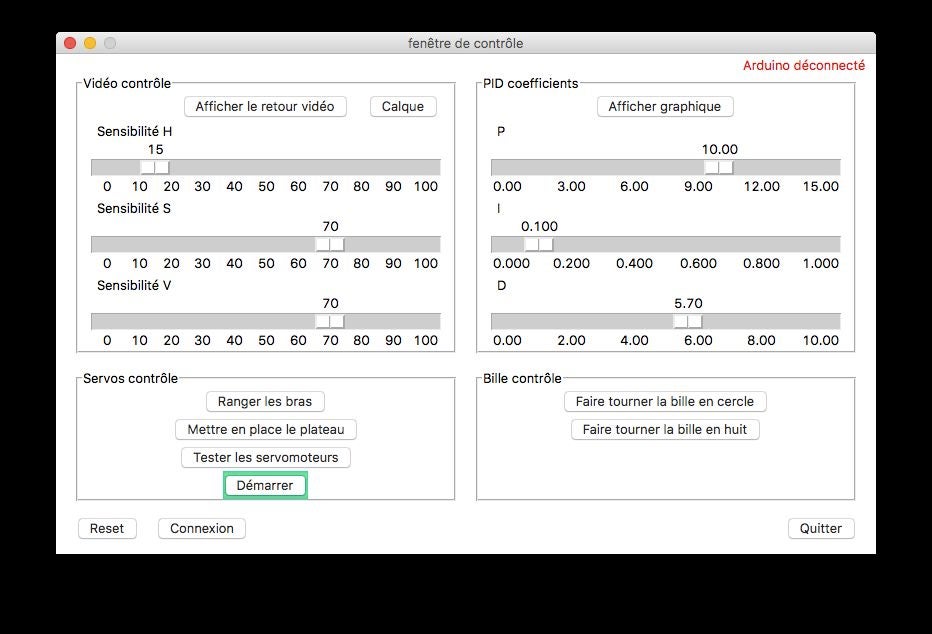

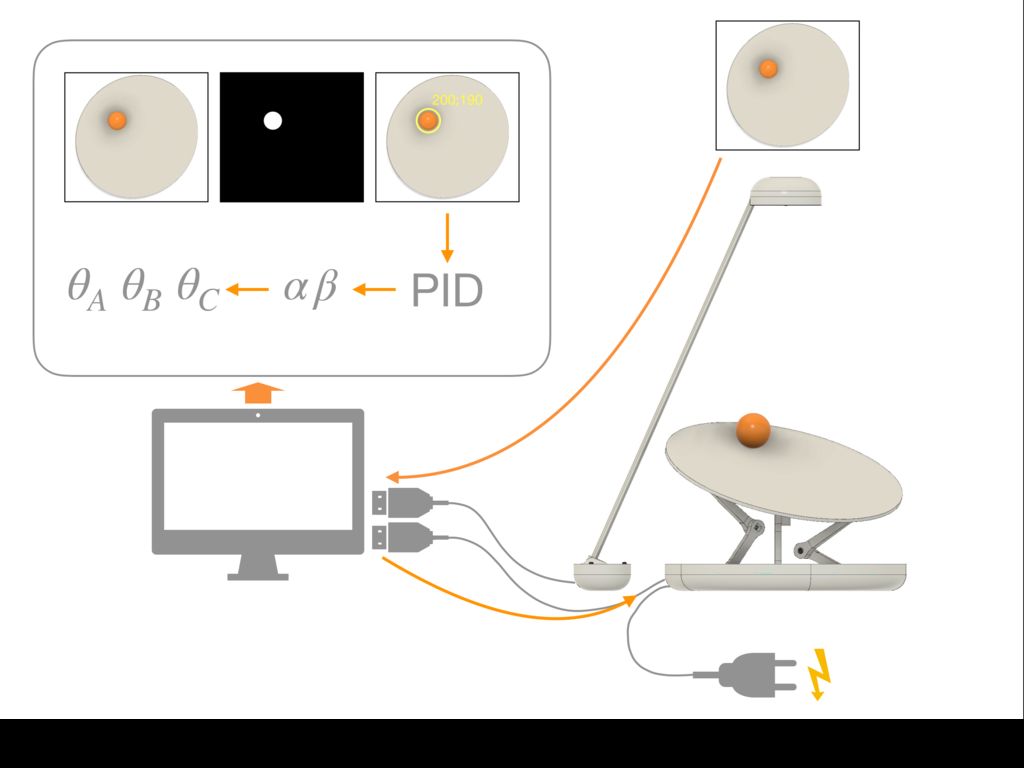

最重要的代碼是在控制系統的計算機中。你可以在這里找到代碼。
如何運作。第一步是找到球的位置。相機發送計算機實時視頻。 python程序接收視頻并且必須處理它。我使用OpenCV庫來進行圖像處理。該程序由于其顏色而檢測到球。這里球是橙色的,然后程序將平均圖像的所有橙色像素的位置以找到球的位置。
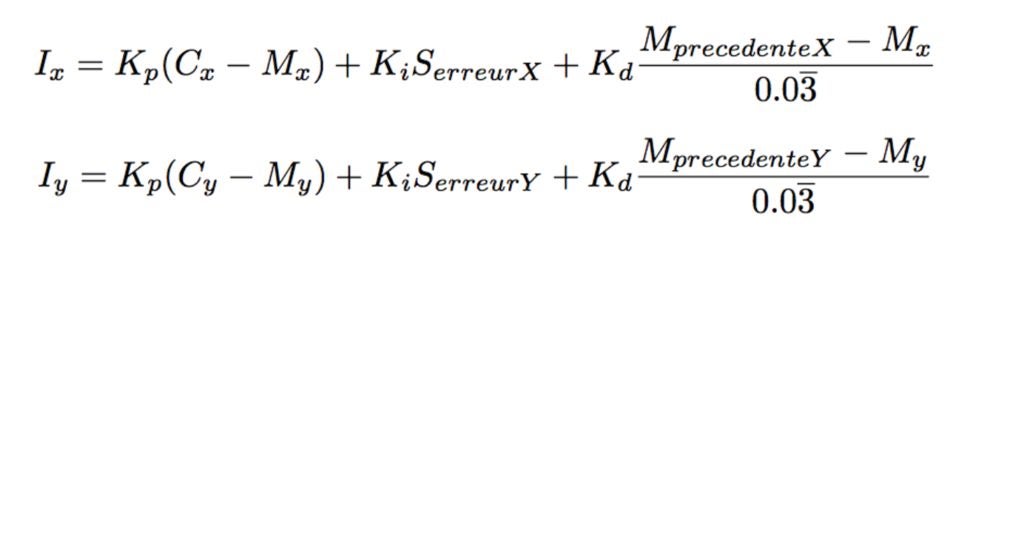
現在我們可以獲得球位置了用PID(比例,積分和微分)控制計算電路板的傾斜度。該規定分三個階段進行。第一步是最簡單的。想象一下,我們想要將球穩定在棋盤中央。球離中心越遠,就越需要傾斜球板。然后你必須測量球的速度:球離開中心的速度越快,你就越需要傾斜棋盤。
-
pcb
+關注
關注
4332文章
23201瀏覽量
401060 -
伺服
+關注
關注
16文章
656瀏覽量
41170
發布評論請先 登錄
相關推薦
PID控制中的反饋機制解析
基于PID控制的溫度調節系統
如何選擇合適的PID控制器
PID控制在工業自動化中的重要性
如何調節PID參數 PID控制器的調試方法
什么是PID控制器的原理 PID算法在自動化中的應用
PID控制器的類型和選擇指南
PID控制在機器人技術中的應用
什么是PID控制與傳統控制的區別
PID控制的優缺點分析 PID參數調節的常見方法
如何使用PID進行溫度控制
串級pid內環和外環怎么確定
位置式PID與增量式PID的區別
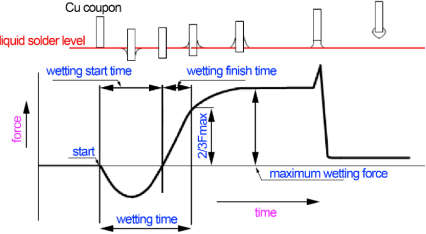
詳解電子元件的潤濕平衡實驗
什么是PID?PID各個參數有什么作用?





 工商網監
工商網監
評論