") 如何用手臂控制一個(gè)DOF機(jī)器人手臂
如何用手臂控制一個(gè)DOF機(jī)器人手臂

步驟1:方框圖/Scematic
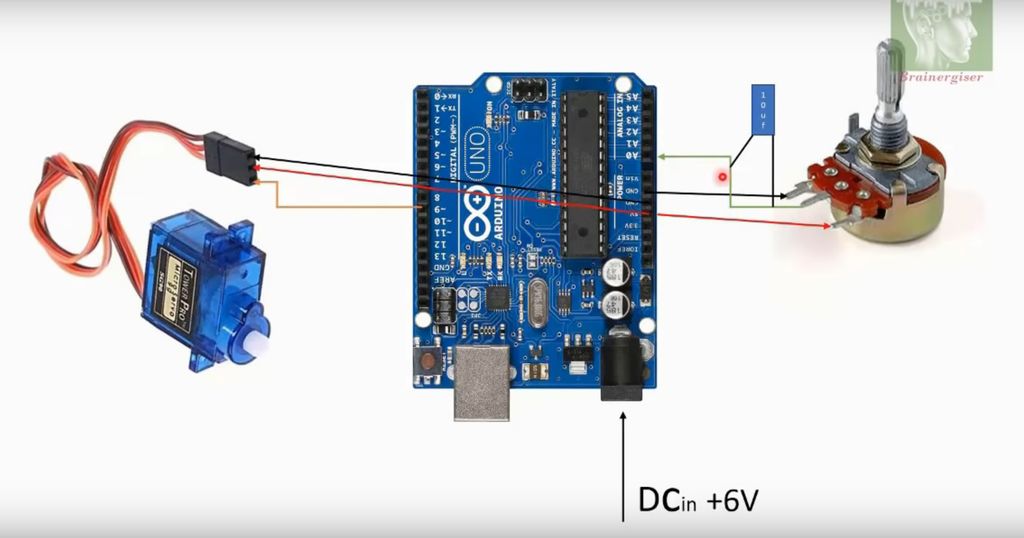
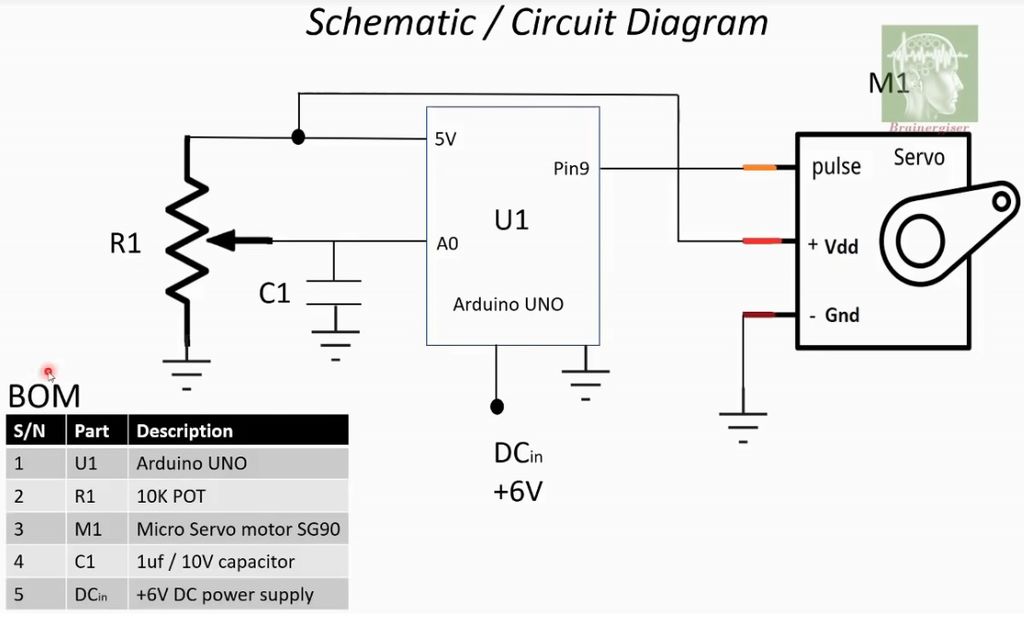
制作所需的電子元件:
1》 Arduino UNO板
2》 Micro SErvo電機(jī)
3》 10 K POT
4》 1uf,16V電容。
連接到端口-9和POT的伺服引腳連接到Arduino板的端口-A0。
第2步:構(gòu)建傳感器
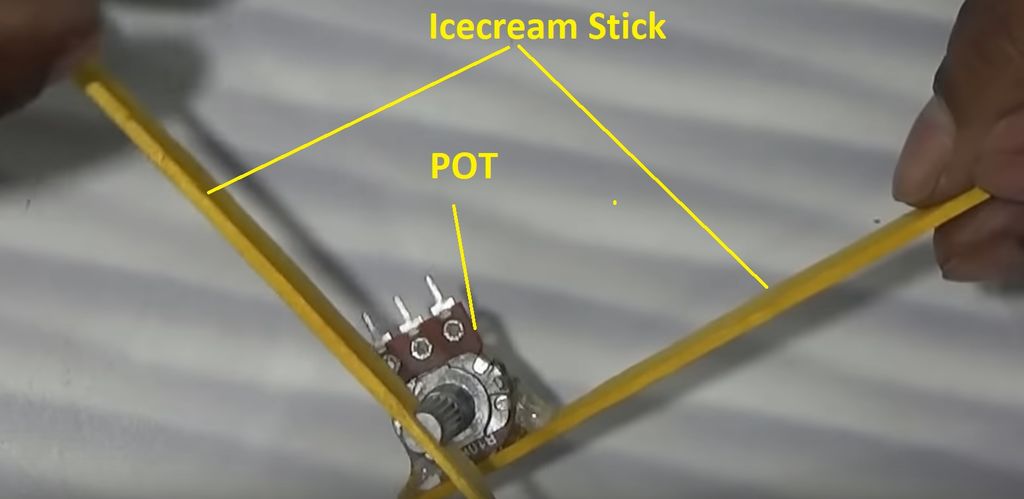
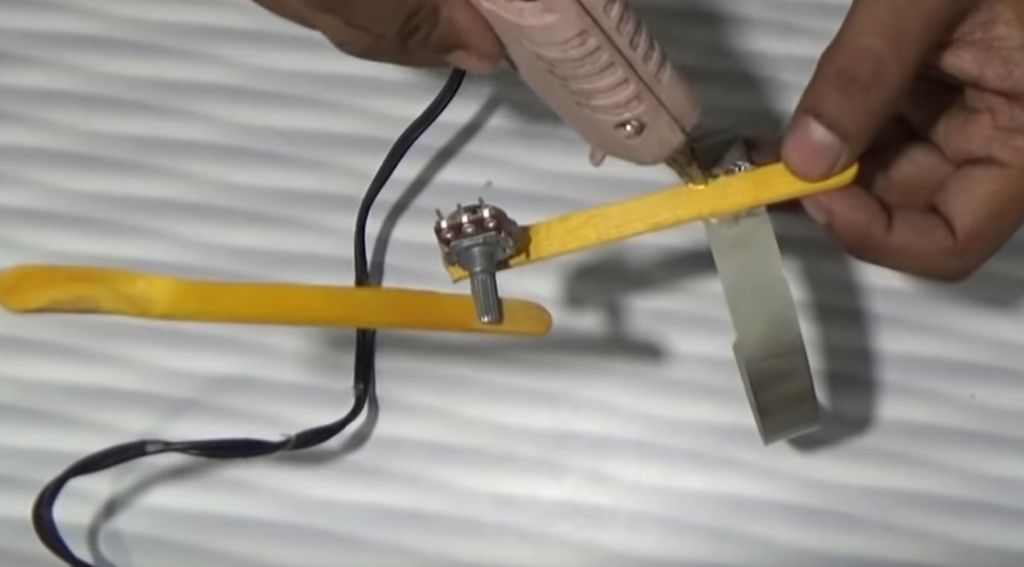

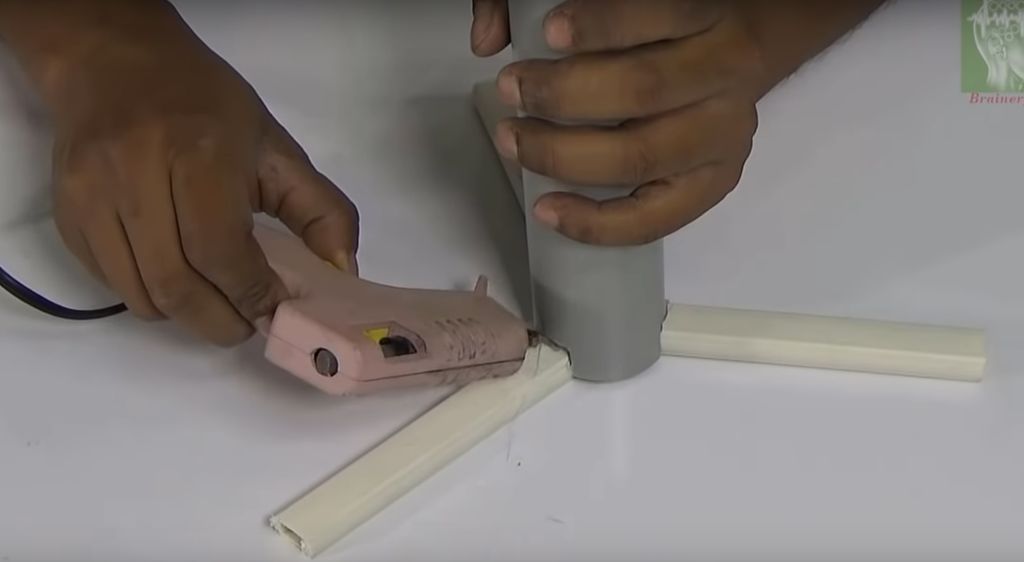
我們使用過(guò)兩個(gè)冰淇淋棒和一個(gè)半PVC管,使傳感器成為我們手臂的一部分。使用熱膠將一根棒連接在罐和PVC管之間。其他棒只附有POT。
將半PVC管與夾子一樣連在一起。 POT位于肘部,傳感器桿的另一側(cè)需要自由運(yùn)動(dòng),因此使用橡皮筋與前臂連接。
第3步:構(gòu)建手臂

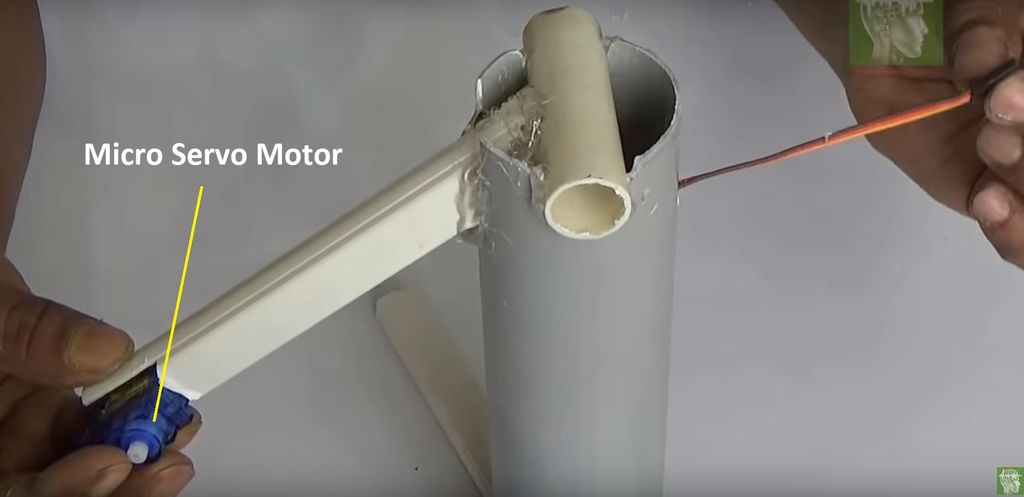

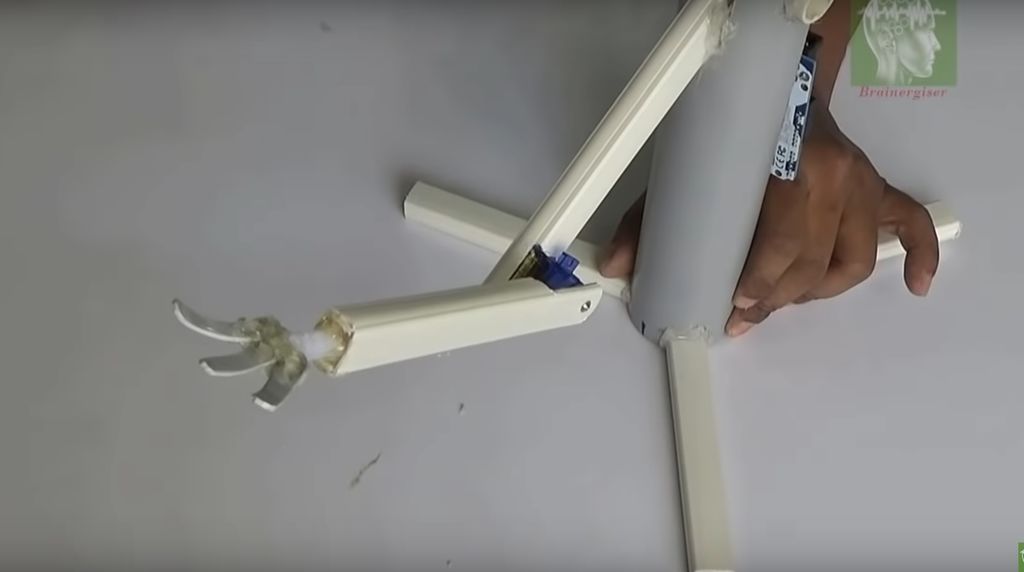

我們使用PVC管和電線套管制作一個(gè)自由度(DOF)機(jī)器人手臂。用于彎頭聯(lián)合我們使用一個(gè)伺服電機(jī)。伺服連接到Pin-9的Arduino板。
第4步:Arduino代碼
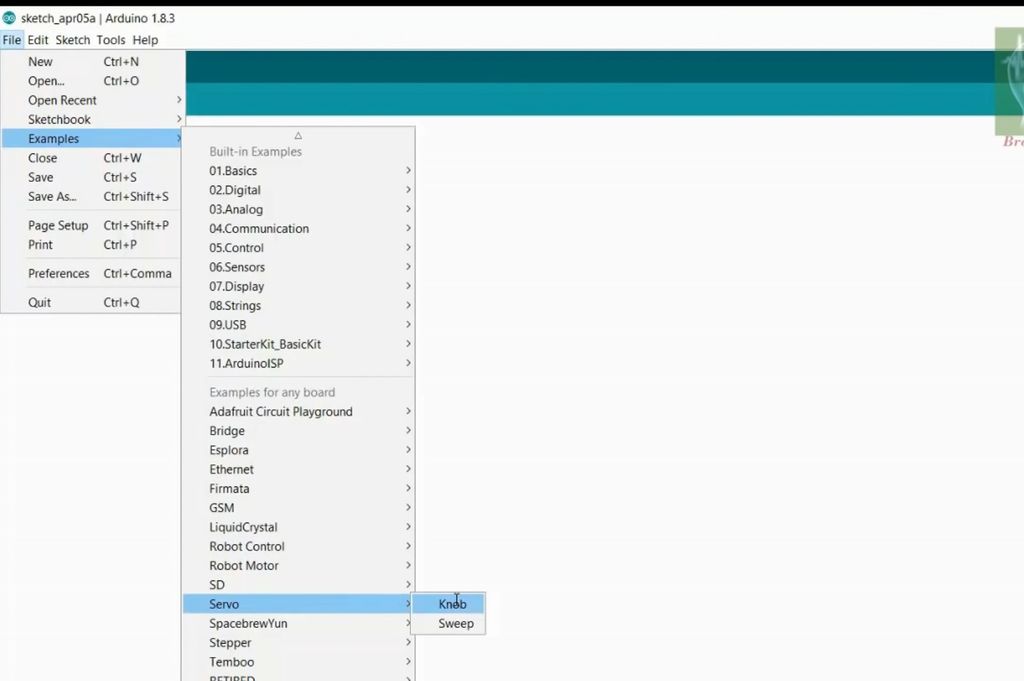
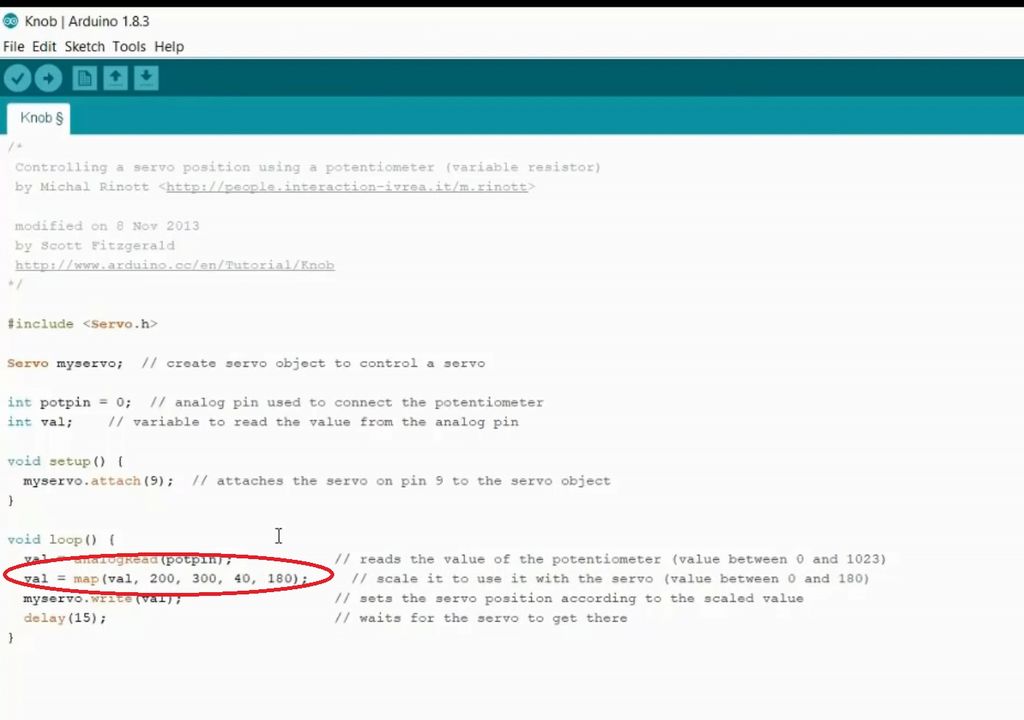
這很容易。它讀取連接POT的Port-A0的模擬值,并根據(jù)該值從地圖數(shù)組中生成一個(gè)值。它發(fā)送到pwm端口-9。基本上它是Arduino IDE中的示例文件。轉(zhuǎn)到file-》 example- Servo-》 knob.You只調(diào)整map()函數(shù)的值。
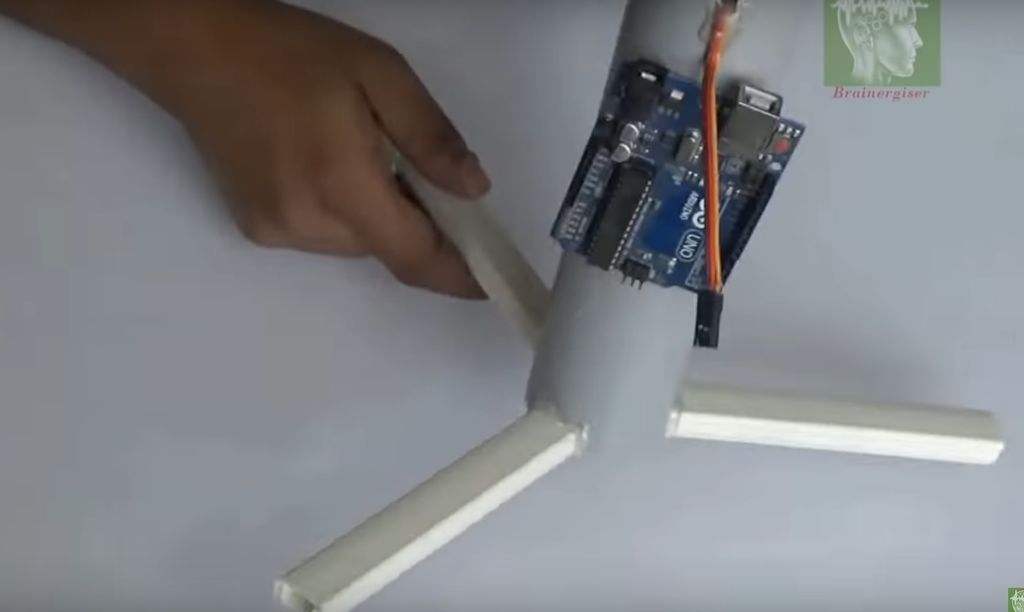
步驟5:最終裝配和測(cè)試

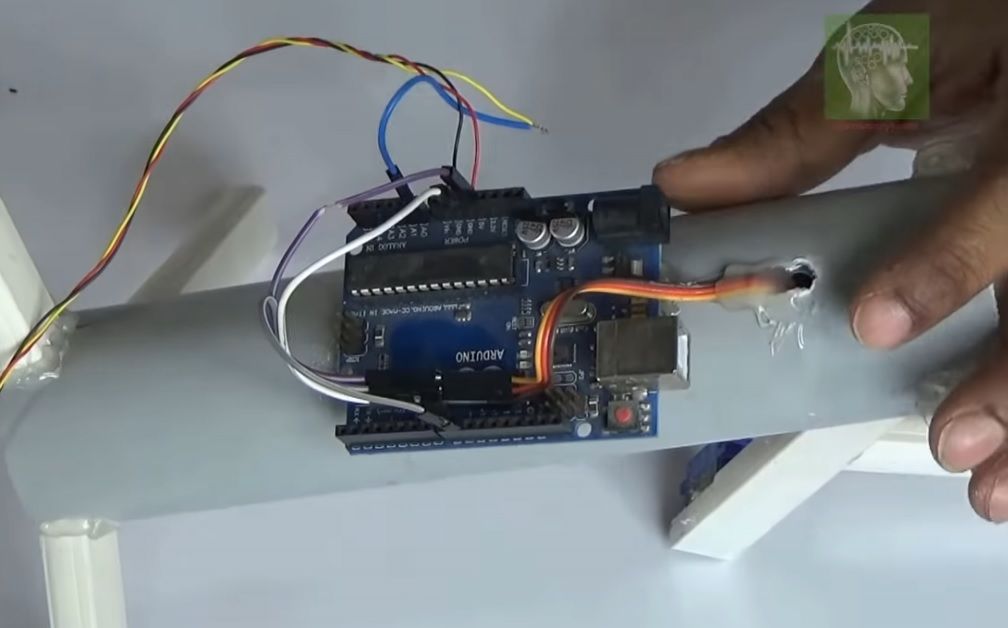
連接伺服和鍋線Arduino按照原理圖。加載草圖。使用外部6V電源為Arduino UNO供電。精細(xì)調(diào)整地圖功能。現(xiàn)在喜歡玩這個(gè)機(jī)器人。
-
Arduino
+關(guān)注
關(guān)注
190文章
6498瀏覽量
192202 -
機(jī)器人手臂
+關(guān)注
關(guān)注
1文章
7瀏覽量
2653
發(fā)布評(píng)論請(qǐng)先 登錄
汽車(chē)智造“破界”!PROFIBUS DP轉(zhuǎn)ETHERNET/IP激活機(jī)器人手臂超能力
速看!發(fā)那科機(jī)器人做為profinet轉(zhuǎn)ethernetip主站參數(shù)設(shè)置,每步都關(guān)鍵

機(jī)器人手臂"聽(tīng)不懂"指令?EtherCAT轉(zhuǎn)PROFINET網(wǎng)關(guān)妙解產(chǎn)線通信僵局
有人這CAN機(jī)器手臂控制板的原理圖嗎?CAN舵機(jī)ID無(wú)法被識(shí)別
焊接工藝革命:CCLink IE轉(zhuǎn)PROFINET網(wǎng)關(guān)在汽車(chē)零部件生產(chǎn)線,賦能智能手臂的力量

焊接工藝革命:CCLink IE轉(zhuǎn)PROFINET網(wǎng)關(guān)智能手臂的力量
開(kāi)源項(xiàng)目!教你如何制作一個(gè)開(kāi)源教育機(jī)械臂
未來(lái)已來(lái),2025人形機(jī)器人量產(chǎn)啟航!泰科機(jī)器人成功斬獲近千萬(wàn)訂單

ABB機(jī)械手臂(機(jī)器人)數(shù)據(jù)采集物聯(lián)網(wǎng)解決方案

40個(gè)激光雷達(dá)!蘋(píng)果布局機(jī)器人感知系統(tǒng),讓碰撞降低63.7%

變速齒輪在機(jī)器人中的使用
焊接機(jī)器人六個(gè)軸分別是什么作用

如果設(shè)計(jì)一款桌面款的機(jī)器玩具,最吸引人的外觀與功能要有哪些?
EtherNet/IP轉(zhuǎn)DeviceNet協(xié)議網(wǎng)關(guān)(EtherNet/IP轉(zhuǎn)DeviceNet)

EtherNet/IP轉(zhuǎn)DeviceNet協(xié)議網(wǎng)關(guān)(JM-EIP-DNT)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論