 便攜式Arduino機器人的制作方法
便攜式Arduino機器人的制作方法
耗材:
1 Arduino Nano
1 600 mAh電池
1電路專家微型開關
1電路專家開/關開關
1 10K歐姆電阻
6 2x4六角螺釘
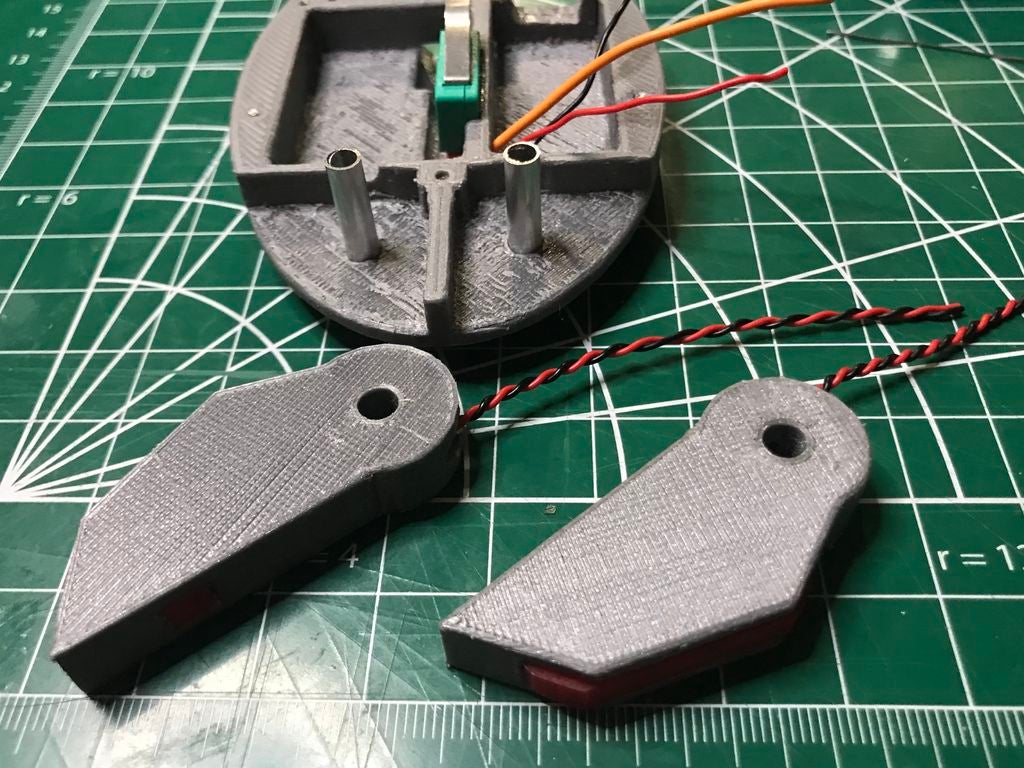
步驟1:3D打印


Bot外殼和Bot的腿應該印有支撐,但是,因為支撐只能在內部這將保留Bot完成后看起來更好。
我使用CEL Robox 3D打印機打印該項目的所有部件。所有部件都印有30%填充,我使用CEL PETG高清玻璃設計師灰色,CEL PETG高清玻璃透明紅色。
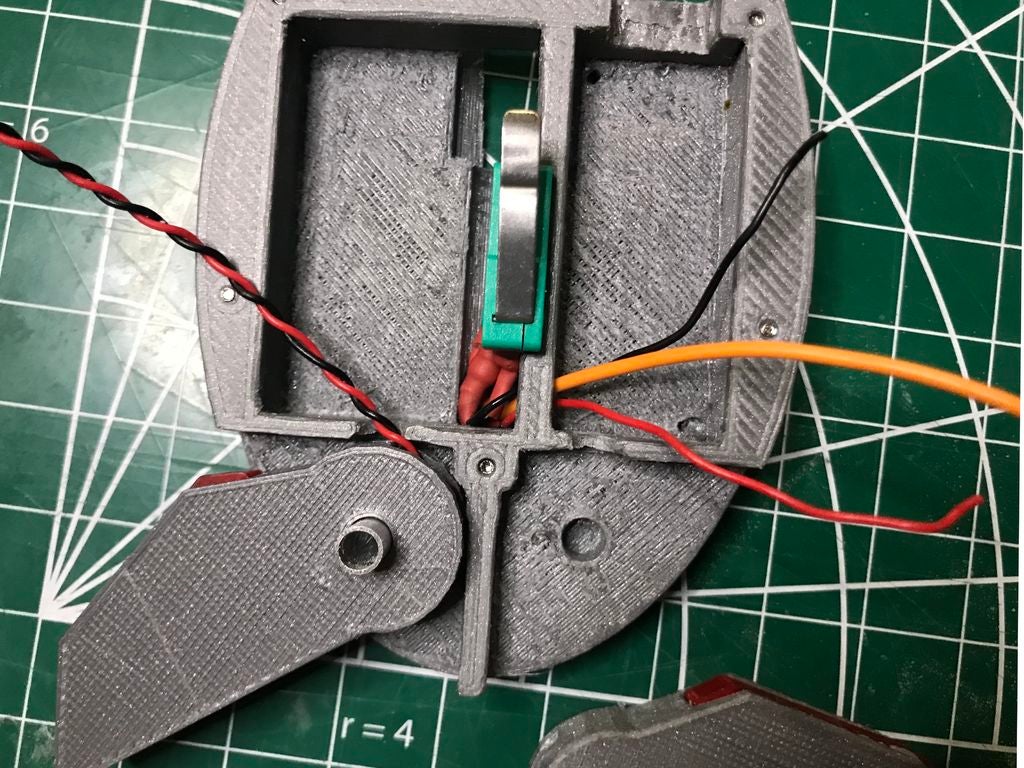
第2步:微開關

微型開關已經存在,但最近它成為人們關注的焦點。現在我們可以在3D打印機,機器人項目,真空機器人等中找到這些微型開關。有人可能會說你不需要為這么小的項目進行切換,但是,我打賭不同。開關可用于多種用途,它可用作傳感器測試的表示,或AI培訓師; D.我稍后會談談這個AI培訓師。
首先,當我讀到有關微型開關的信息時,我認為它會像普通的開/關開關一樣工作,我錯了微動開關需要一點工作而不僅僅是一個直接的即插即用。如果你是所有這些的新手,不要擔心我是新手,如果我能做到你可以做到:)。
從我自己的經驗然后令人困惑的部分是開關有3條腿,我們只使用2,但最后,我們將有3條線從交換機出來。然而,在經過多次反復試驗之后,我認為我已經將其解決了,我會確保它盡可能直截了當。
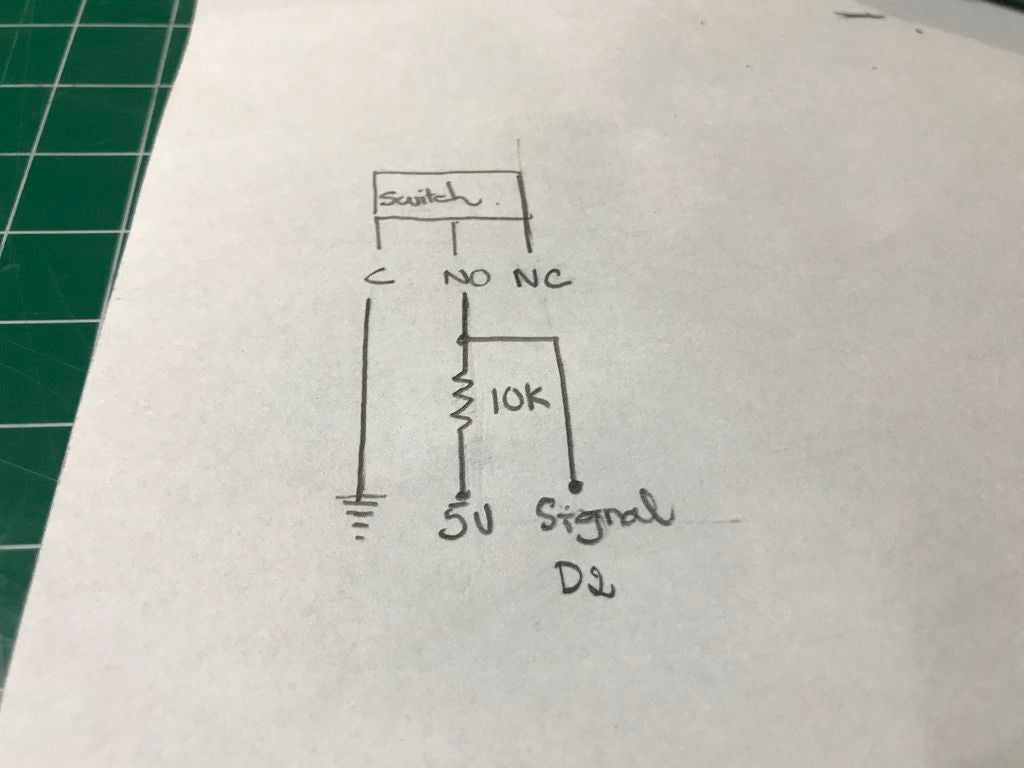
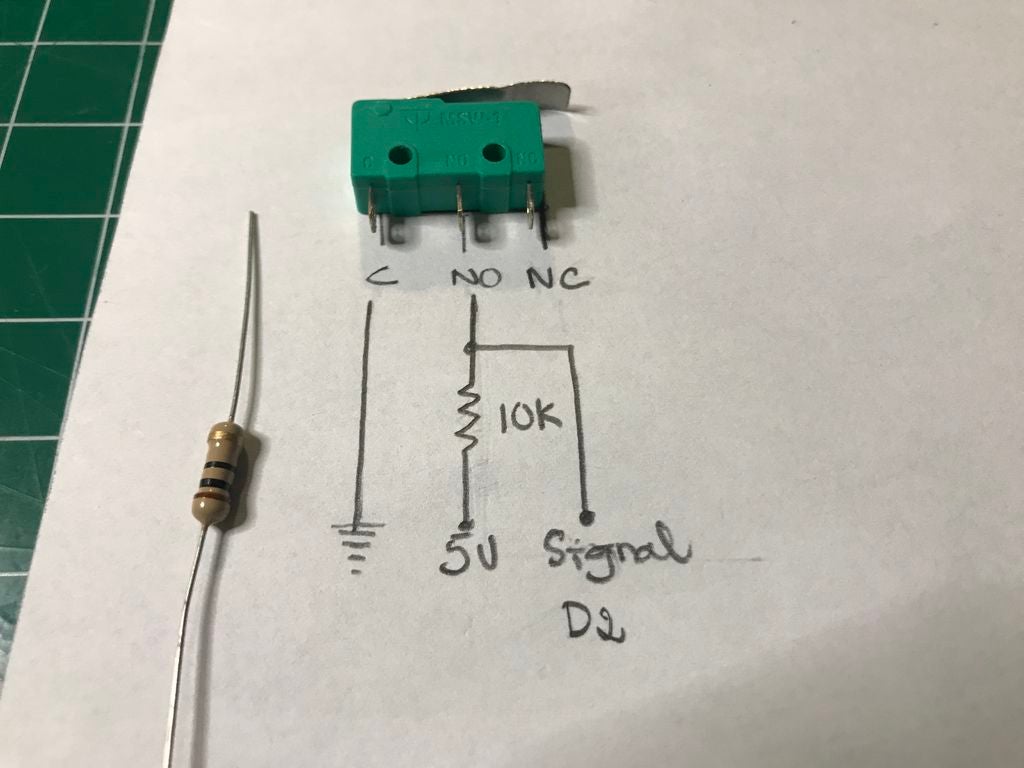
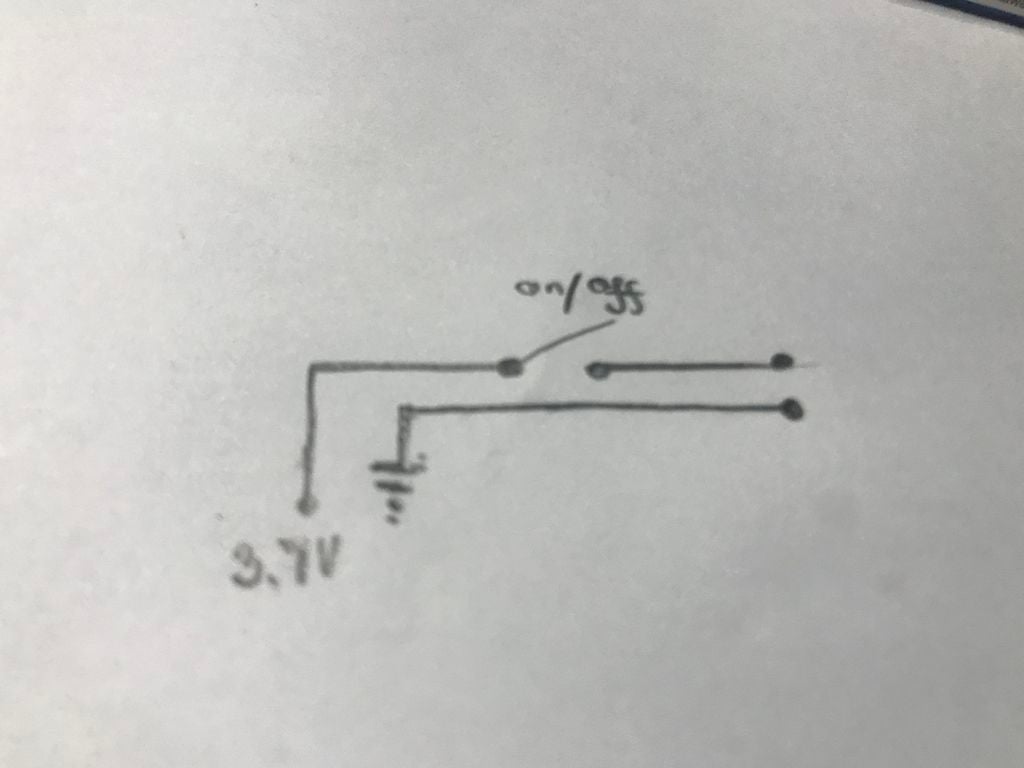
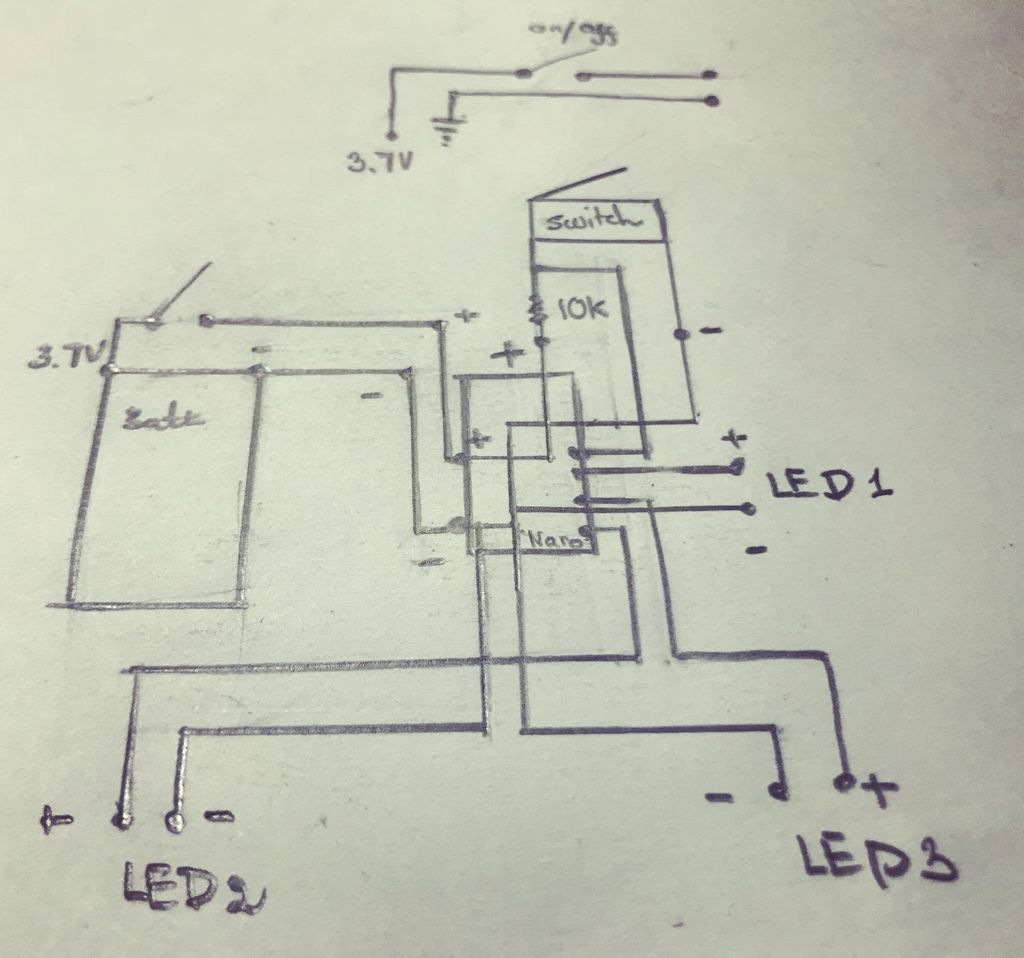
交換機有3個引腳:C,N0,NC。我們只使用C和N0。
1。 C接地線
2。在繼續之前閱讀注意事項:N0將有1根電線從它出來而不是2.我多次犯了這個錯誤并最終導致信號錯誤。有主線和側線,如果你在N0焊接這兩根線,很可能你的信號不可讀或不穩定。
3。主線將N0連接到10K電阻,然后10K電阻將成為開關的電源。
4。側線將連接到10K電阻和N0之間的主線。這是我們收集信號的地方,以便保持數據線清潔的重要性。
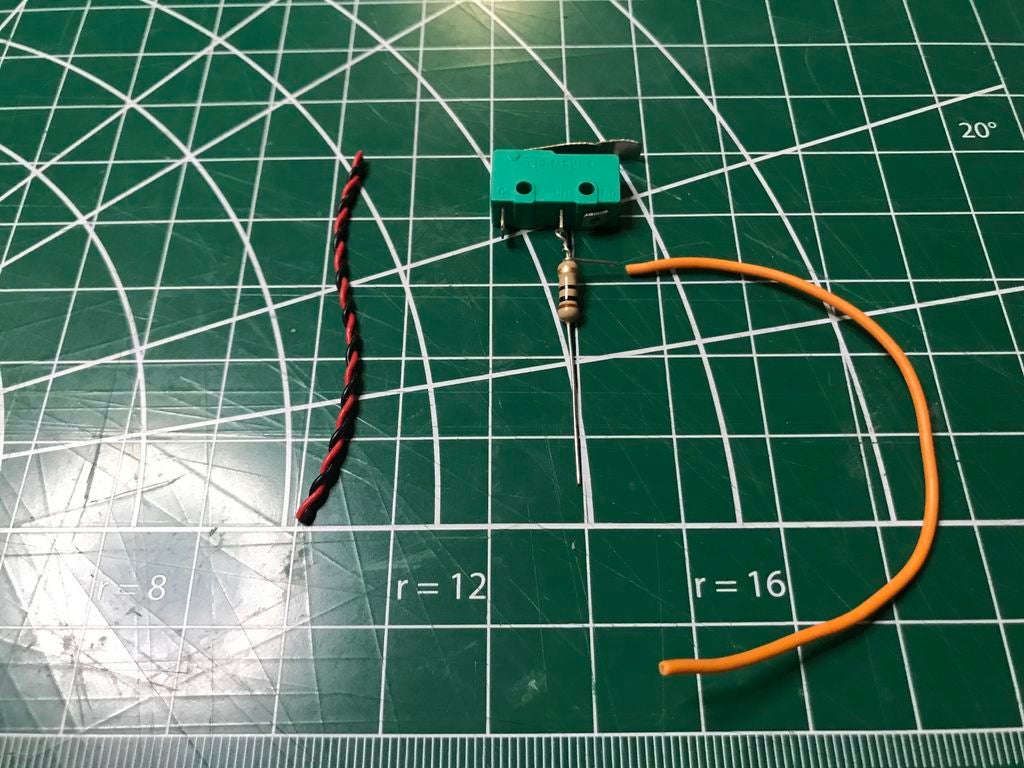
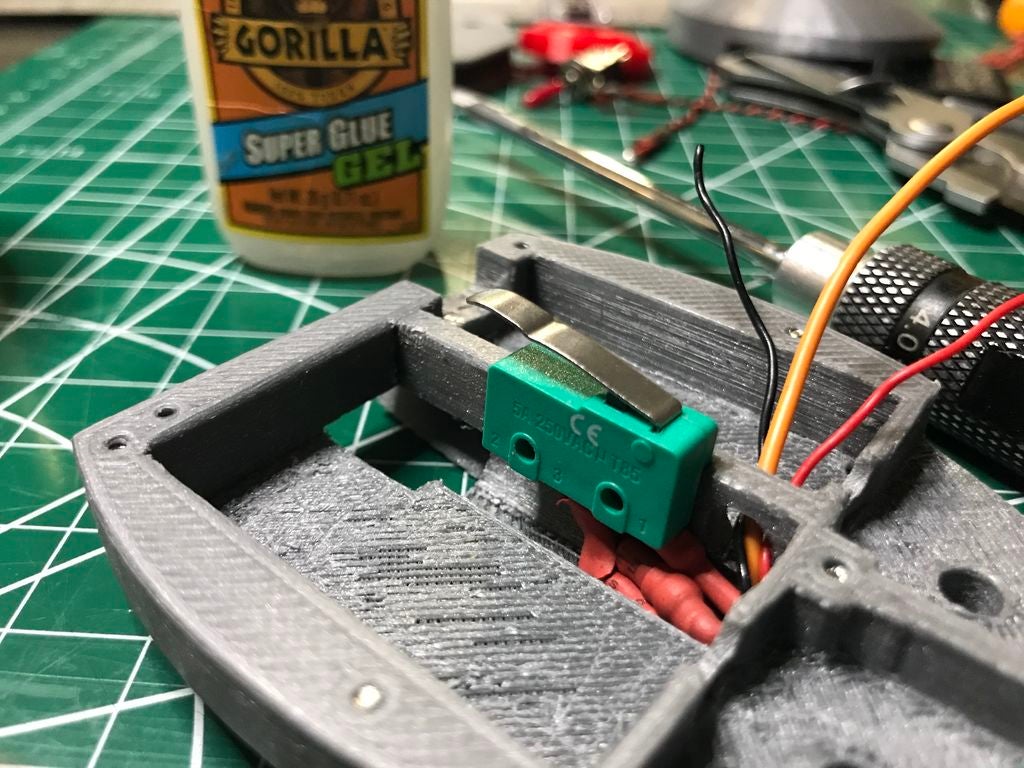
5。將微型開關粘貼到位并確保給它時間完全干燥。
步驟3:腿LED




這是3D打印的真正力量。腿具有用于電線和LED的內部腔室。設計中的挑戰之一是腿是可移動的。 3D打印技術為我提供了一個簡潔的解決方案,我有一個內部腔室供電線穿過。
我使用Adafruit LED亮片作為其緊湊型電路板上的電阻器,以實現最大的空間效率。我們所要做的就是將電源和地線焊接到電路板上。包裹LED的熱量是可選的,但是如果您將該項目靠近自來水源進行平面加熱,則強烈建議使用熱包裝。
1。將LED插入支腿
2。將LED固定,確保LED朝上以獲得最大照明。
3。將腿部面板插入每個腿部,最好使用透明的材料打印這部分光線可以輕松穿過的部分。
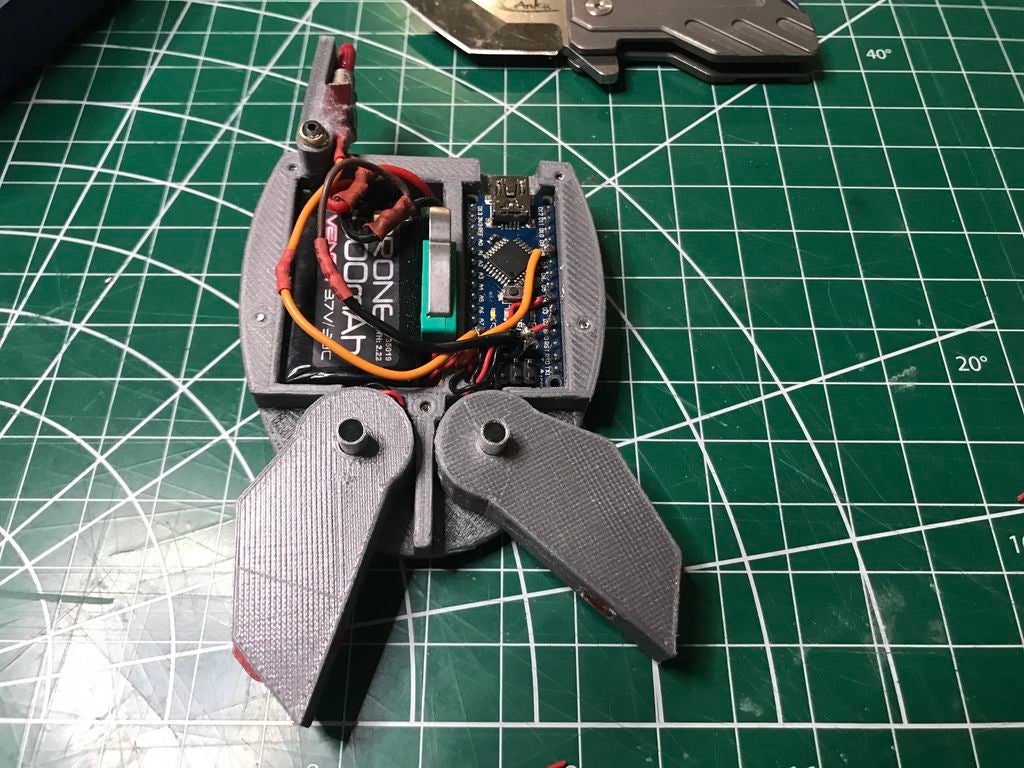
第4步:安裝腿


我從當地的一家愛好商店購買了這些5毫米鋁管。你也可以3D打印這些釘或木釘工作得很好。
1。從每條腿到右邊的部分運行電線,它將容納Arduino Nano。
2。確保腿部自由移動
步驟5:開/關開關


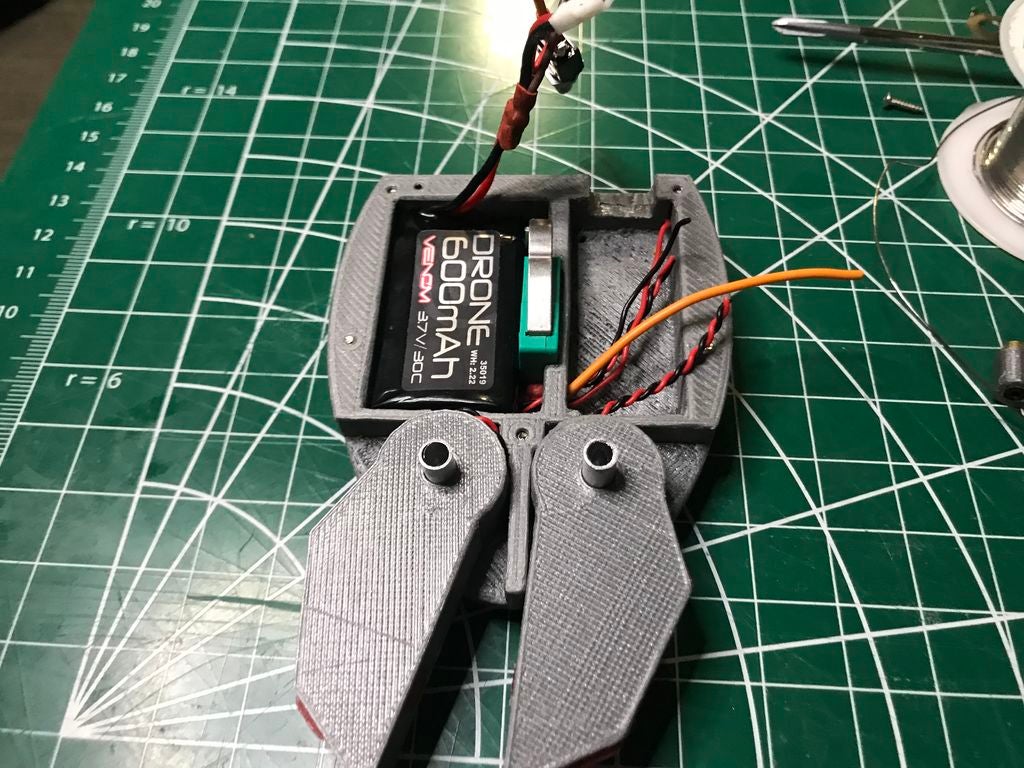
開/關開關比微動開關簡單得多。這種類型的開關就像一個水閘,我們只需將開關連接到帶電池的電路系列。然后開關將粘到翻蓋門上。
確保給它足夠的電線,以便可以打開和關閉翻蓋門。
請觀看組裝視頻,以便更好地了解如何將機器人放在一起。
第6步:編碼和測試



我建議將PA_Calibration代碼上傳到機器人以測試腿LED。這將確保我們為正確的LED分配正確的引腳編號。
int ChestLED = 3 ;
int LLegLED = 2 ;
int RLegLED = 4 ;
int LED_INDEX[3]={3,2,4}; // Chest LED, Left Leg LED, Right Leg LED
校準代碼將使LED和胸部LED指示燈閃爍,以測試確保引腳未切換,您可以將HIGH更改為LOW以關閉LED以進行雙重檢查。
void loop()
{
digitalWrite(LED_INDEX[1], HIGH); //LOW
digitalWrite(LED_INDEX[2], HIGH); //LOW
}
校準并仔細檢查后,我們可以關閉頂部并將胸部安裝到前面,將所有螺釘對齊,并將前后連接在一起的6個2mm六角螺釘。
PAB_Basic代碼提供了一些更多的操作功能,如:Blink Chest LED,Excited mode,Disco mode。你可以通過不常見的和普通的其他方式嘗試這些模式。要讓機器人在不同的時間做不同的事情,需要更多的編碼。
void loop()
{
XChestBlink();
//XExcited();
//XDisco();
}
PAB_Randoaccordinglym代碼提供了一個隨機值,如果你分配給一個動作的值,機器人將做出相應的反應。通過賦值,具有更多價值的任務使其更有可能發生。
int Randomness = random(1,600);
if(Randomness == 150 ){XExcited();}
if(Randomness == 250 ){XChestBlink();}
if(Randomness == 350 ){XDisco();}
if(Randomness == 450 ){XDisco();}
if(Randomness == 550 ){XDisco();}
隨機性可能很愚蠢,然而,它是環境隨機變化的絕佳代表,例如太陽被云或環境中的潮濕變化所覆蓋等等。這是使這個機器人成為許多科學項目的測試平臺的關鍵方法。
第7步:完成整理,下一步是什么?

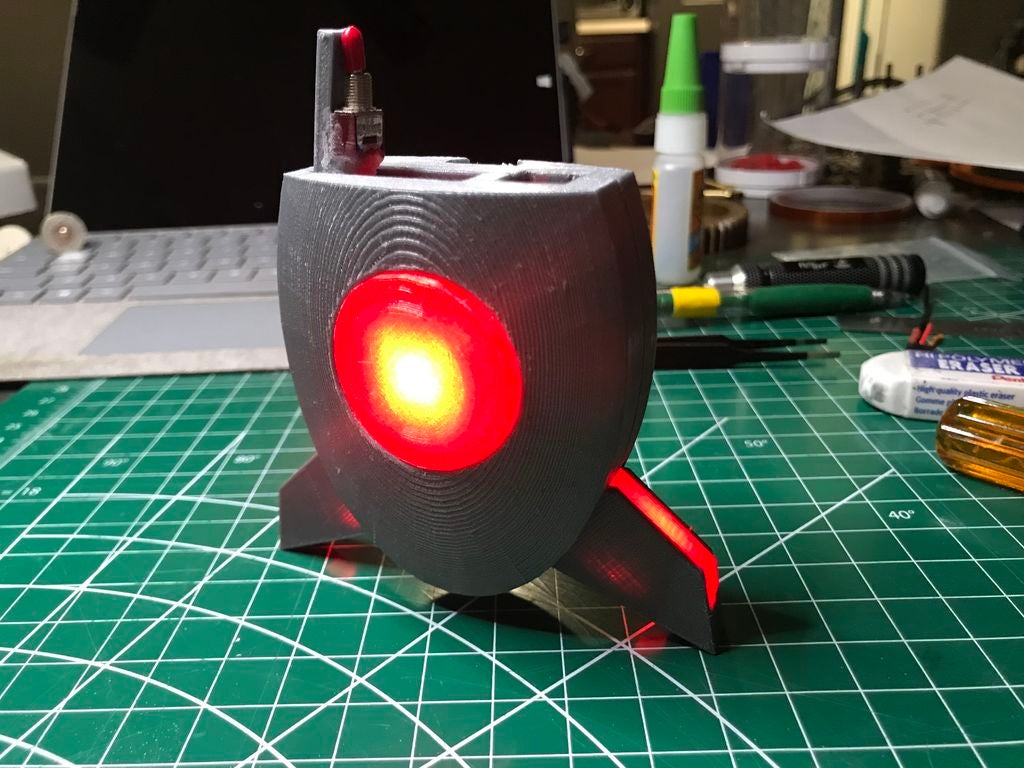
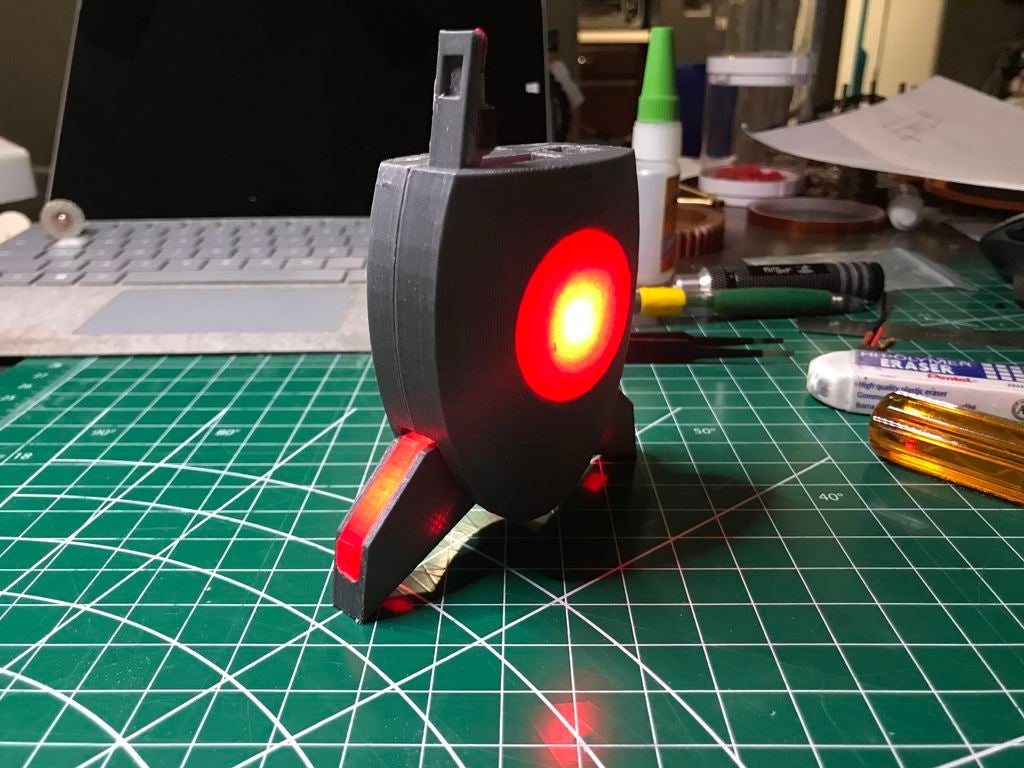

Bot可以作為便攜式測試平臺使用,隨身攜帶,作為科幻定制的一部分。
但是,您也可以安裝更多的傳感器適合你的項目。例如,我的另一個PAB我安裝了一個帶10K歐姆電位器的蜂鳴器。我能夠讓機器人生成隨機聲音模式,使用微動開關作為輸入來訓練機器人制作更好的聲音模式,或者有時Bot會唱星球大戰主題曲。
你也可以無線,電路專家攜帶ESP 32 Wifi和藍牙 - 鏈接。這個主板需要有關如何將代碼上傳到主板的額外知識,但是,該主板具有內置的Wi-Fi和藍牙模塊,并且與Arduino Nano具有相同的尺寸,因此您無需對機器人進行太多修改外殼
-
機器人
+關注
關注
213文章
29509瀏覽量
211642 -
Arduino
+關注
關注
189文章
6492瀏覽量
190155
發布評論請先 登錄





 工商網監
工商網監
評論