") 游泳池清潔機(jī)器人的制作
游泳池清潔機(jī)器人的制作

第1步:工作機(jī)制

運(yùn)動(dòng)和收集:
我們?cè)偷幕緳C(jī)制包括在前面不斷旋轉(zhuǎn)的傳送帶,以收集碎屑和污垢。
兩個(gè)驅(qū)動(dòng)的電機(jī)運(yùn)動(dòng)所需的水輪。
導(dǎo)航:
手冊(cè)模式:使用Mobile的加速度計(jì)數(shù)據(jù)可以控制Skara的方向。因此,這個(gè)人只需要傾斜他的手機(jī)。
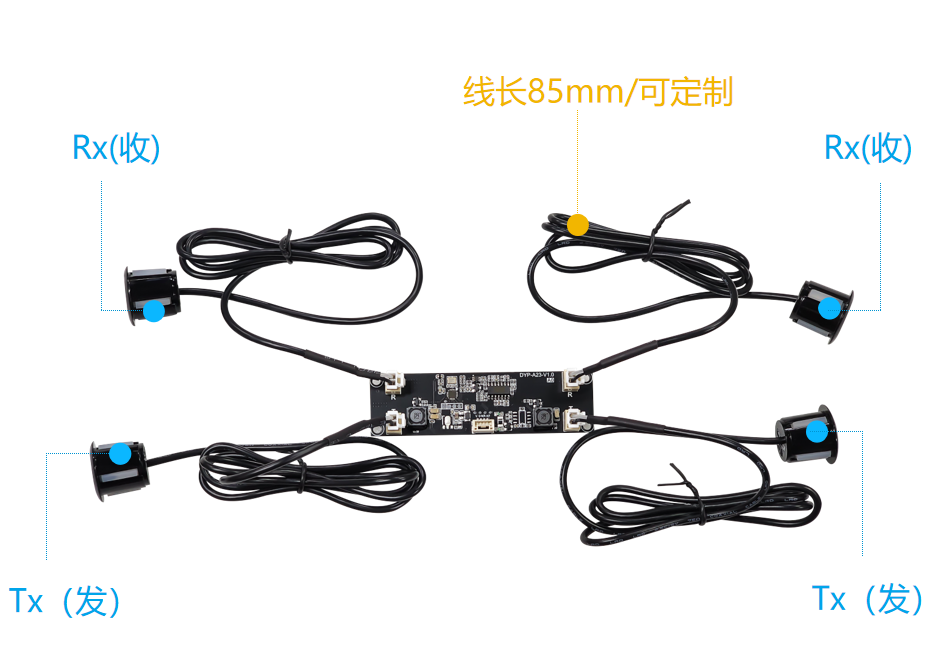
自主模式:我已經(jīng)實(shí)現(xiàn)了一個(gè)隨機(jī)運(yùn)動(dòng),補(bǔ)充了避障算法,以便在感知到靠近墻壁時(shí)幫助自動(dòng)機(jī)。兩個(gè)超聲波傳感器用于檢測(cè)障礙物。
步驟2:CAD模型

CAD模型在SolidWorks上完成
您可以在此instructables中找到cad文件
步驟3:組件




激光切割面板-2nos
4mm厚的亞克力板
Thermocol或聚苯乙烯板
車床切割桿
彎曲的塑料板(木質(zhì)飾面)
3d打印部件
螺絲和螺母
模板(“Skara”打印)
Mseal-環(huán)氧樹脂
Net Fabric
工具:
砂紙
涂料
角磨機(jī)
鉆頭
刀具
其他電動(dòng)工具
電子產(chǎn)品:
NodeMCU
降壓轉(zhuǎn)換器mini 360
撥動(dòng)開關(guān)
BC547b-晶體管
4.7K電阻器
單芯電線
L293d-電機(jī)驅(qū)動(dòng)器
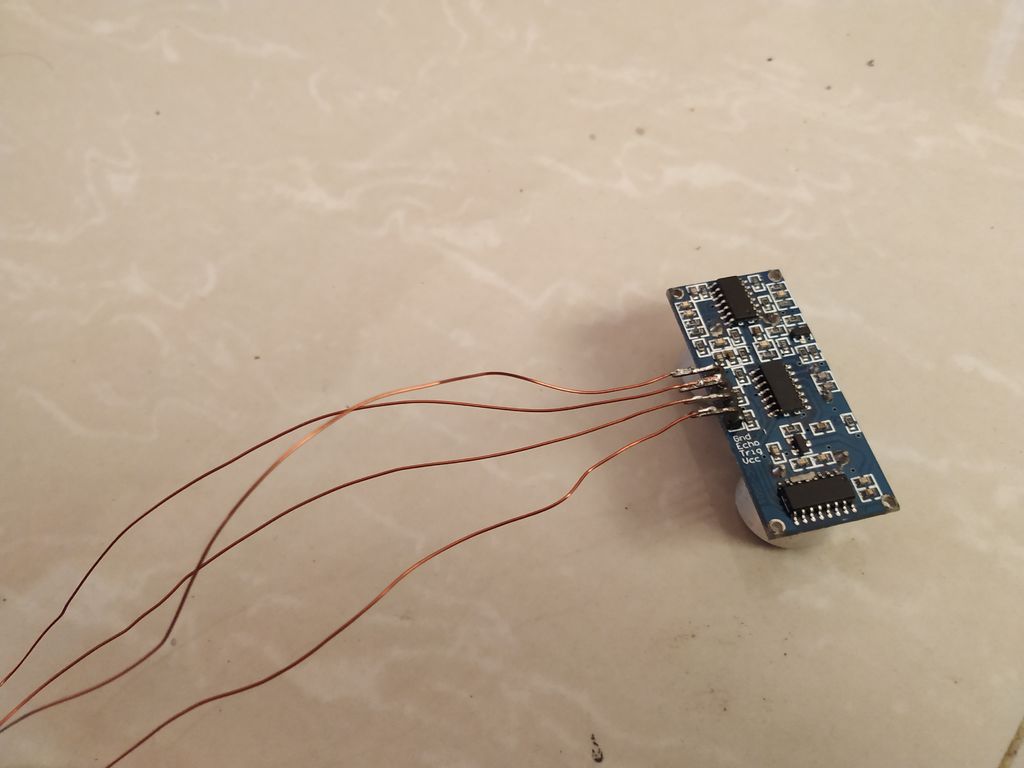
超聲波傳感器 - 2nos
100rpm直流電機(jī) - 3nos
12v鉛酸電池
電池充電器
焊接板
焊接電線
焊接棒
第4步:3d打印



3d打印由我的朋友之一的家用組裝打印機(jī)
您可以找到4個(gè)必須打印的文件
通過將3d CAD文件轉(zhuǎn)換為stl格式來打印零件。
水車采用直觀設(shè)計(jì),翼型翅片可以移動(dòng)ace水比傳統(tǒng)設(shè)計(jì)更有效。這有助于減少電機(jī)的負(fù)荷,并顯著提高自動(dòng)機(jī)的運(yùn)動(dòng)速度。
步驟5:激光切割板和車床桿





邊 面板:
為了使CAD渲染成為現(xiàn)實(shí),必須仔細(xì)考慮為原型構(gòu)造選擇的材料,同時(shí)要記住整個(gè)結(jié)構(gòu)需要具有凈正浮力。
主要結(jié)構(gòu)如圖所示。框架的最初選擇是采用鋁合金7系列,因?yàn)樗哂懈p的重量,更好的耐腐蝕性和更好的結(jié)構(gòu)剛性。然而,由于當(dāng)?shù)厥袌?chǎng)上的材料不可用,我不得不用Mild Steel制造。
Side Frame Cad轉(zhuǎn)換為.DXF格式并提供給供應(yīng)商。您可以找到此instructable中包含的文件。
在LCG3015上進(jìn)行激光切割
車床桿
連接兩個(gè)面板并支撐箱體的桿是通過當(dāng)?shù)刂圃焐痰甑能嚧布庸ぶ瞥傻摹?/p>
需要總共4個(gè)桿
步驟6:構(gòu)建Bin








Bin is使用亞克力板制成,使用電動(dòng)工具切割,尺寸參考CAD圖紙。
使用工業(yè)級(jí)防水環(huán)氧樹脂將垃圾箱的各個(gè)切割部分組裝在一起。
整個(gè)底盤及其組件在4mm不銹鋼的幫助下組裝在一起螺栓和3個(gè)不銹鋼螺柱。使用的螺母是自動(dòng)鎖定的,以避免任何性質(zhì)的順應(yīng)性。
完成丙烯酸板兩面的圓形孔以放置電機(jī)
然后將電池和電子設(shè)備外殼從1mm塑料板上切下并包裝到機(jī)箱中。電線開口正確密封和絕緣。
第7步:浮動(dòng)







與純粹結(jié)構(gòu)相關(guān)的最后一個(gè)組件是浮選裝置用于使整個(gè)原型具有正浮力,并將其重心保持在大致整個(gè)原型的幾何中心。
浮選裝置由聚苯乙烯(thermocol)制成。砂紙用于正確塑造它們
然后通過使用mSeal通過計(jì)算考慮上述約束將它們附著到框架上。
步驟8:超聲波傳感器支持
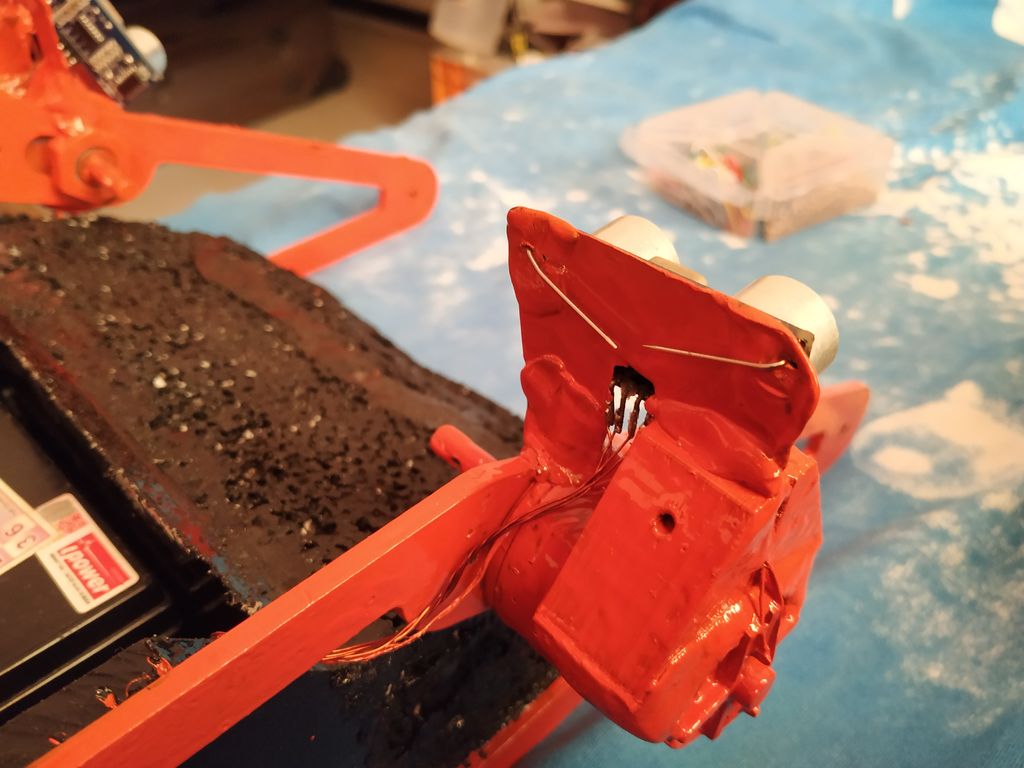


這是使用錫板制作3d印刷和背板
使用mseal(一種環(huán)氧樹脂)
步驟9:電子





12V鉛酸電池用于為整個(gè)系統(tǒng)供電
與降壓轉(zhuǎn)換器和L293d電機(jī)控制器并聯(lián)
降壓轉(zhuǎn)換器將12v轉(zhuǎn)換為5v用于系統(tǒng)
IRF540n mosfet用作控制傳送帶電機(jī)的數(shù)字開關(guān)
NodeMCU用作主微控制器,通過WiFi(熱點(diǎn))連接到手機(jī)
步驟10:傳送帶

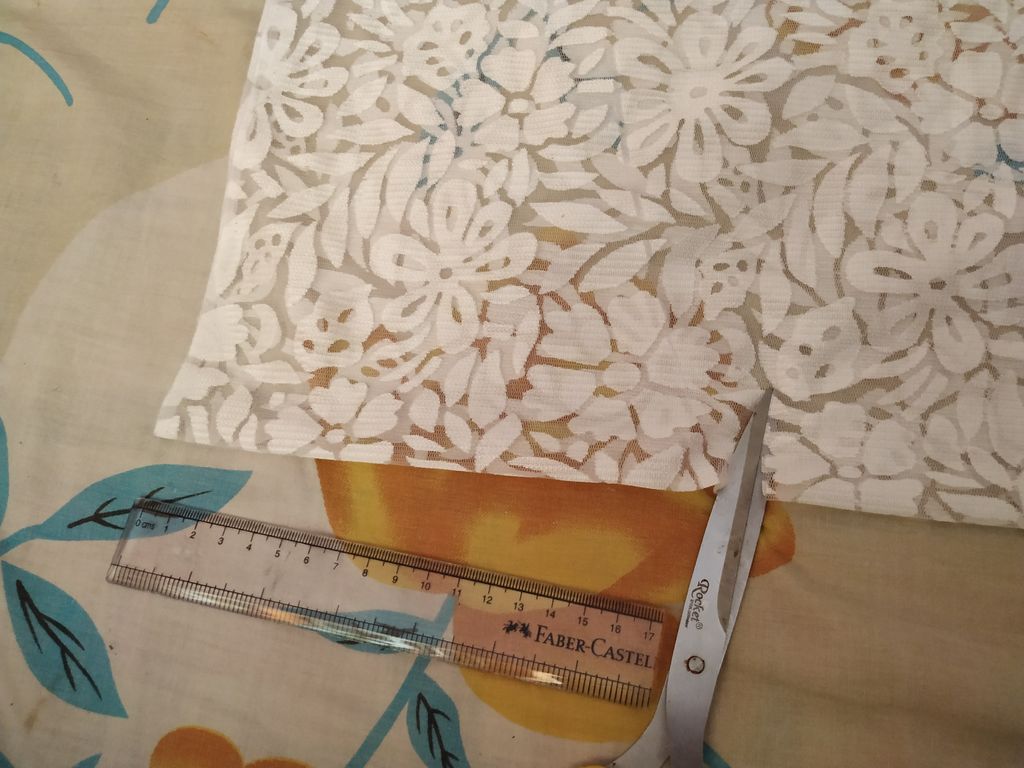
使用從當(dāng)?shù)厣痰曩徺I的網(wǎng)布制作
將布料以圓形方式切割成連續(xù)的方式
第11步:繪畫




使用合成涂料涂抹Skara
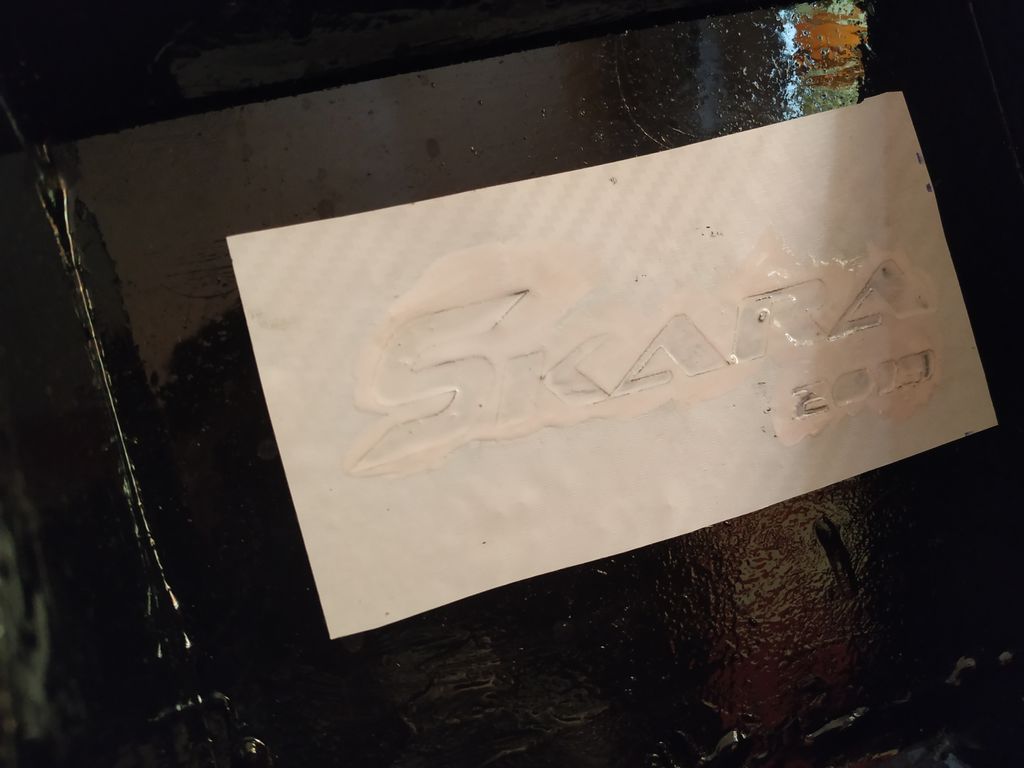
步驟12:Skara符號(hào)激光切割
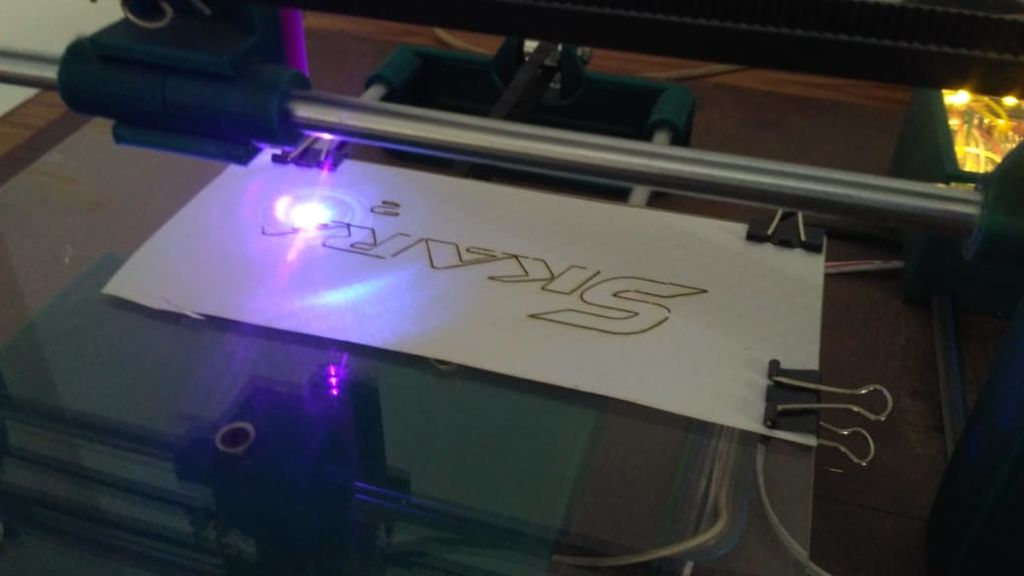

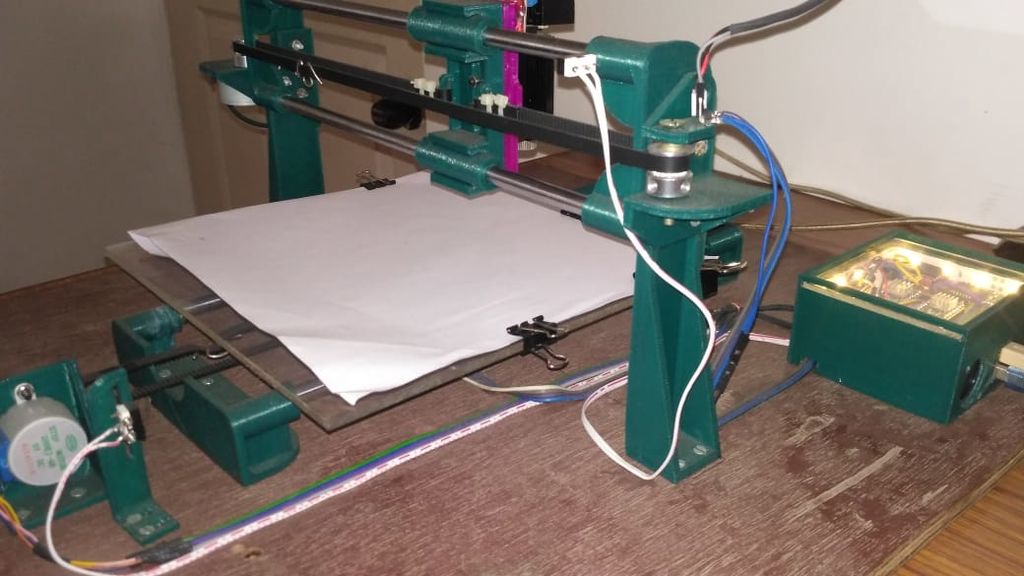



模具被切斷使用我朋友制作的自制激光。
激光切割的材料是貼紙
步驟13:編碼


預(yù)編碼的東西:
對(duì)于這個(gè)項(xiàng)目,我使用Arduino IDE來編程我的NodeMCU。如果您之前已經(jīng)使用過Arduino,那么這是更簡(jiǎn)單的方法,您不需要學(xué)習(xí)新的編程語言,例如Python或Lua。
如果您以前從未這樣做過,首先您必須為Arduino軟件添加ESP8266板支持。
免費(fèi)下載,安裝在您的計(jì)算機(jī)上并啟動(dòng)它。
Arduino IDE已經(jīng)支持很多不同的主板:Arduino Nano,Mine,Uno,Mega,Yún等。不幸的是ESP8266默認(rèn)不支持那些支持的開發(fā)板。因此,為了將您的代碼上傳到ESP8266基板,您必須首先將其屬性添加到Arduino的軟件中。
導(dǎo)航到文件》首選項(xiàng)(在Windows操作系統(tǒng)上按Ctrl +);將以下URL添加到Additional Boards Manager文本框(Preferences窗口底部的文本框)
如果文本框不是空白,則表示之前已經(jīng)在Arduino IDE上添加了其他板。在上一個(gè)URL和上面的URL末尾添加一個(gè)逗號(hào)。
點(diǎn)擊“確定”按鈕并關(guān)閉首選項(xiàng)窗口。
導(dǎo)航工具》主板》主板管理器,添加ESP8266主板。
在搜索文本框中輸入“ESP8266”,選擇“ESP8266社區(qū)的esp8266”并安裝它。
現(xiàn)在你的Arduino IDE將準(zhǔn)備好與許多基于ESP8266的開發(fā)板一起工作,如通用ESP8266,NodeMcu(我在本教程中使用),Adafruit Huzzah,Sparkfun Thing,WeMos等。
在這個(gè)項(xiàng)目中,我使用了Blynk庫。應(yīng)手動(dòng)安裝Blynk庫。
主要編碼:
您必須更新Blynk身份驗(yàn)證密鑰和您的WiFi憑據(jù)(ssid和密碼)在上傳代碼之前。
下載下面提供的代碼和庫。
在Arduino IDE中打開提供的代碼(“最終代碼”)并將其上傳到NodeMCU 。
智能手機(jī)的某些傳感器也可以與Blynk一起使用。這次我想用它的加速度計(jì)來控制我的機(jī)器人。傾斜手機(jī),機(jī)器人將向左/向右轉(zhuǎn)動(dòng)或向前/向后移動(dòng)。
第14步:代碼說明
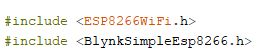

在這個(gè)項(xiàng)目中,我只需要使用ESP8266和Blynk庫。它們將添加到代碼的開頭。
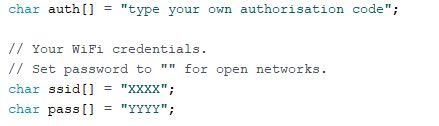
您必須配置Blynk授權(quán)密鑰和Wi-Fi憑據(jù)。通過這種方式,您的ESP8266將能夠到達(dá)您的Wi-Fi路由器并等待來自Blynk服務(wù)器的命令。將“鍵入您自己的授權(quán)碼”,XXXX和YYYY替換為您的身份驗(yàn)證密鑰(您將通過電子郵件收到),您的Wi-Fi網(wǎng)絡(luò)的SSID和密碼。
定義連接到h橋的NodeMCU的引腳。您可以使用每個(gè)引腳的GPIO編號(hào)的文字值(D1,D2等)。
步驟15:設(shè)置Blynk
Blynk是一項(xiàng)旨在通過互聯(lián)網(wǎng)連接遠(yuǎn)程控制硬件的服務(wù)。它使您可以輕松創(chuàng)建物聯(lián)網(wǎng)小工具,并支持多種硬件,如Arduinos,ESP8266,Raspberry Pi等。
您可以使用它從Android或iOS智能手機(jī)發(fā)送數(shù)據(jù)(或平板電腦)到遠(yuǎn)程設(shè)備。例如,您還可以讀取,存儲(chǔ)和顯示由harware傳感器獲取的數(shù)據(jù)。
Blynk App用于創(chuàng)建用戶界面。它有各種各樣的小部件:按鈕,滑塊,操縱桿,顯示器等。用戶可以將小部件拖放到儀表板,并為多個(gè)項(xiàng)目創(chuàng)建自定義圖形界面。
它有一個(gè)‘能源的概念。用戶從2000個(gè)自由能點(diǎn)開始。使用的每個(gè)小部件(在任何項(xiàng)目中)都會(huì)消耗一些能量,從而限制了項(xiàng)目中使用的最大小部件數(shù)量。例如,按鈕消耗200個(gè)能量點(diǎn)。這樣,人們可以創(chuàng)建一個(gè)最多包含10個(gè)按鈕的界面。用戶可以購買額外的能量點(diǎn),并創(chuàng)建更復(fù)雜的界面和/或幾個(gè)不同的項(xiàng)目。
Blynk App的命令通過互聯(lián)網(wǎng)上傳到Blynk服務(wù)器。另一個(gè)硬件(例如NodeMCU)使用Blynk Libraries從服務(wù)器讀取這些命令并執(zhí)行操作。硬件還可以向服務(wù)器提供一些數(shù)據(jù),這些數(shù)據(jù)可能會(huì)顯示在應(yīng)用程序上。
安裝應(yīng)用并創(chuàng)建一個(gè)新帳戶。之后,您將準(zhǔn)備好創(chuàng)建您的第一個(gè)項(xiàng)目。您還需要安裝Blynk庫并獲取身份驗(yàn)證代碼。上一步描述了安裝庫的過程。
·BLYNK_WRITE(V0)函數(shù)用于讀取加速度計(jì)值。 y軸上的加速度用于控制機(jī)器人是否應(yīng)該向右/向左轉(zhuǎn),并且使用z軸加速度來查看機(jī)器人是否應(yīng)該向前/向后移動(dòng)。如果未超過閾值,則電機(jī)將停止。
在移動(dòng)設(shè)備上下載blynk應(yīng)用程序從Widget Box拖動(dòng)加速度計(jì)對(duì)象并將其放在儀表板上。在按鈕設(shè)置下,將虛擬引腳指定為輸出。我使用虛擬引腳V0。你應(yīng)該在Blynk App中獲得Auth Token。
轉(zhuǎn)到項(xiàng)目設(shè)置(螺母圖標(biāo))。對(duì)于手動(dòng)/自動(dòng)按鈕我在應(yīng)用程序中使用了V1傳送帶我使用V2作為輸出。
您可以在圖片上看到最終應(yīng)用的屏幕截圖。
第16步:最終裝配




我附上了所有部分
因此項(xiàng)目已完成
-
清潔機(jī)器人
+關(guān)注
關(guān)注
2文章
69瀏覽量
6233
發(fā)布評(píng)論請(qǐng)先 登錄
沃斯商用清潔機(jī)器人上崗徐州地鐵
新品首發(fā)!電應(yīng)普C01水聲通信模組發(fā)布,連接水下世界

盤點(diǎn)#機(jī)器人開發(fā)平臺(tái)
普渡機(jī)器人獲頒2025酒店杰出智能配送清潔機(jī)器人獎(jiǎng)
電應(yīng)普泳池清潔機(jī)器人測(cè)距/避障傳感器方案
精準(zhǔn)定位,深度清潔:揭秘工廠清潔機(jī)器人的核心技術(shù)
從塵埃到潔凈:工廠清潔機(jī)器人的日常使命與成就
螢石舉辦2024清潔機(jī)器人新品發(fā)布會(huì) 多維智能再造行業(yè)標(biāo)桿

愛普生SGPM01助力智能泳池清潔機(jī)器人導(dǎo)航方案
光伏清潔機(jī)器人4G之痛,LoRa通訊取而代之?

開源項(xiàng)目!用ESP32做一個(gè)可愛的無用機(jī)器人
開源項(xiàng)目!用ESP32做一個(gè)可愛的無用機(jī)器人
高效節(jié)能,普渡清潔機(jī)器人引領(lǐng)綠色清潔潮流
商用清潔新紀(jì)元:為何商用清潔機(jī)器人成為必選,及挑選指南
商用清潔賽道,普渡清潔機(jī)器人如何玩出新花樣?
- 設(shè)計(jì)技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測(cè)量?jī)x表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動(dòng)
- 處理器/DSP
- EDA/IC設(shè)計(jì)
- 存儲(chǔ)技術(shù)
- 光電顯示
- EMC/EMI設(shè)計(jì)
- 連接器
- 行業(yè)應(yīng)用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡(luò)
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實(shí)
- 可穿戴設(shè)備
- 機(jī)器人
- 安全設(shè)備/系統(tǒng)
- 軍用/航空電子
- 移動(dòng)通信
- 工業(yè)控制
- 便攜設(shè)備
- 觸控感測(cè)
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 特色內(nèi)容
- 專欄推薦
- 學(xué)院
- 設(shè)計(jì)資源
- 設(shè)計(jì)技術(shù)
- 電子百科
- 電子視頻
- 元器件知識(shí)
- 工具箱
- VIP會(huì)員
- 最新技術(shù)文章
- 產(chǎn)品地圖
- 品牌地圖
- 社區(qū)
- 小組
- 論壇
- 問答
- 評(píng)測(cè)試用
- 企業(yè)服務(wù)
- 產(chǎn)品
- 資料
- 文章
- 方案
- 企業(yè)
- 供應(yīng)鏈服務(wù)
- 硬件開發(fā)
- 華秋電路
- 華秋商城
- 華秋智造
- nextPCB
- BOM配單
- 媒體服務(wù)
- 網(wǎng)站廣告
- 在線研討會(huì)
- 活動(dòng)策劃
- 新聞發(fā)布
- 新品發(fā)布
- 小測(cè)驗(yàn)
- 設(shè)計(jì)大賽
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動(dòng)態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報(bào)投訴
- 社交網(wǎng)絡(luò)
- 微博
- 移動(dòng)端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應(yīng)鏈服務(wù) PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
評(píng)論