 如何組裝一個四軸飛行器
如何組裝一個四軸飛行器

步驟1:1.0完整組件列表
這些是我購買的組件。可以使用其他網站的組件,但請記住,從在線購買組件的經驗法則是避免購買太便宜的組件。您支付的越多,您獲得的質量就越高。
AliExpress.com產品 - DJI Tello相機無人機Ryze Tello與編碼教育720P高清傳輸四軸飛行器FVR直升機
步驟2:1.1 Navio2 Emlid飛行控制器
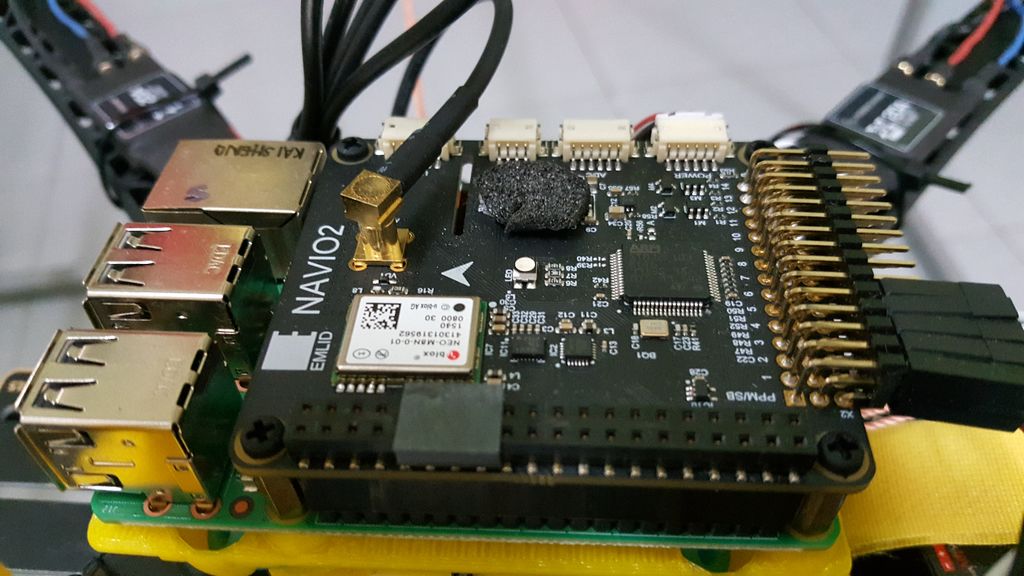
飛行控制器的主要功能是提供對電子速度的控制控制器(ESC)根據變送器的輸入指示電機的轉速。
使用Navio2飛行控制器的一個優點是因為它內置了大部分組件,所以我們不需要單獨購買并自行整合。 Navio2飛行控制器中組合在一起的組件包括
1。雙慣性測量單元(IMU)
2。氣壓計測量高度精確到10厘米的分辨率。
3。全球導航衛星系統接收器跟蹤來自世界各地的衛星。
4。指南針或磁力計確定航向的方向
6。無線電通信協處理器接受來自接收器的PPM或SBUS輸入,并為伺服導軌上的電機和伺服器輸出14個PWM通道
請記得同時購買阻尼球將Navio2板連接到其3D打印支架
步驟3:1.2 Raspberry Pi3型號B
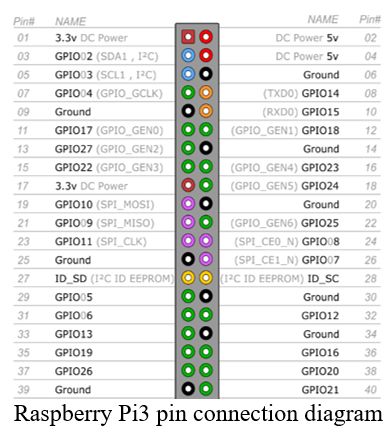
Raspberry Pi是一款微型計算機,其平均大小與數據處理信用卡相當。通過通用輸入輸出(GPIO)引腳,Raspberry Pi具有高運行處理能力在擴展GPIO的40個引腳中,Navio2利用37個引腳進行飛行控制,只留下3個免費GPIO用于附加組件,即GPIO 17(引腳11),GPIO18(引腳12)和GPIO 26(Pin 37)。
步驟4:1.3機身
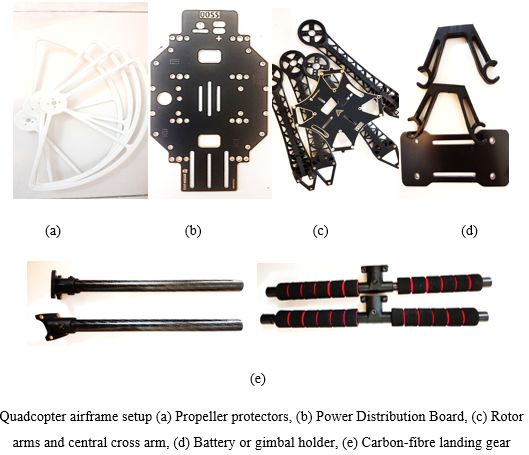
機身組成了四軸飛行器的主體,帶有臂,起落架,支架,配電板和刀片保護裝置。選擇X框架是因為它具有良好的對稱性,設計更簡單,更靈活,適合突然傾斜。所選框架尺寸的框架為485 mm。機身尺寸的布置必須與電池,螺旋槳以及電機的布置相匹配,如上表所示。
要擰緊連接機身不同部件的螺釘,您將需要合適尺寸的Alan鍵。根據供應商提供的指南,使用合適尺寸的Alan鍵緊密組裝機身(振動可能導致螺釘分離)。
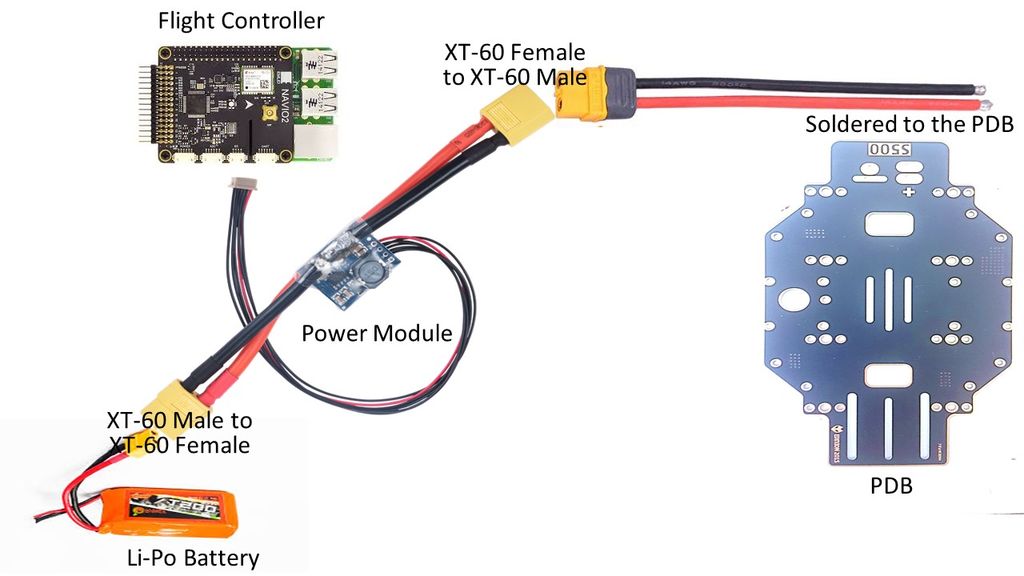
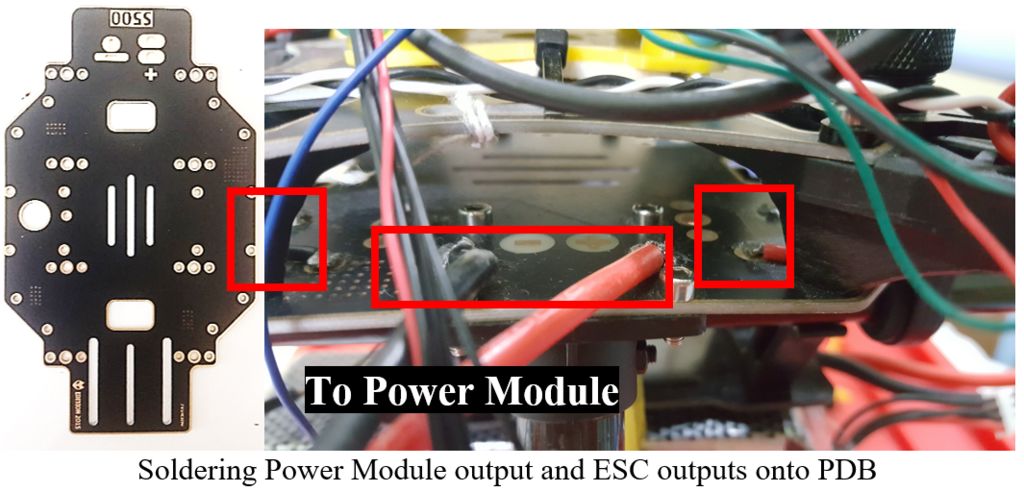
機身應與配電板(PDB)配合使用我們焊接其端子上的所有接線,將電池連接到飛行控制器(通過電源模塊線),連接到ESC和電機(通過電介質接線)。
您需要一個連接器連接PDB和電源模塊,連接器的一端焊接到PDB上。另一方面,您需要確保其連接器頭與您的電源模塊線兼容。電源模塊將電流從電池分流到PDB,將一小部分分流到飛行控制器。因此,其終端連接器也必須與電池的兼容。參考上圖,XT-60連接器將連接到其XT-60對應物,而T型連接器必須連接到其T型連接器對應物。
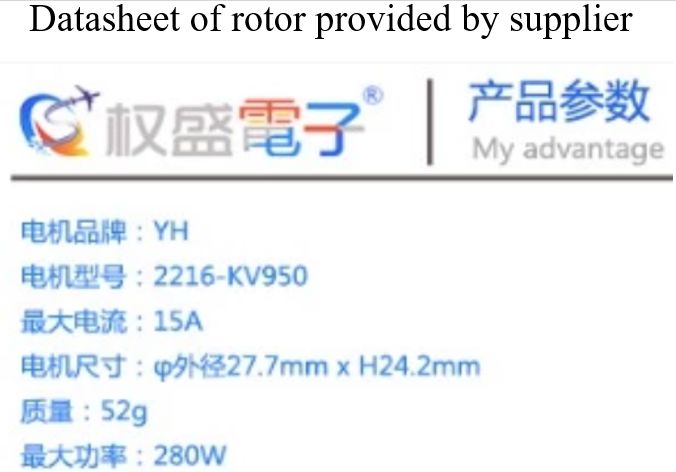
步驟5:1.4電機2216/950KV



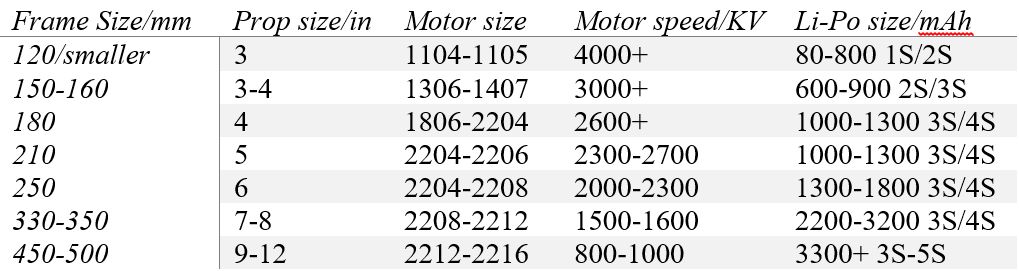
電機類型的選擇取決于螺旋槳或無人機的大小。較大的螺旋槳應由較低轉速的轉子提供動力,因為空氣阻力較高。 950 KV電機意味著電機連接的每伏特的轉速為950 rpm。 2216指定電動機尺寸。以下數據(也顯示在組件的圖像中 - 1.2機身)可作為一般指南,但最合適的電機尺寸可以是制造商/經銷商建議的尺寸。
框架尺寸---電機尺寸---電機KV/速度 - 支柱尺寸(In)
《120 ------------ 1104-1105-- ----- 4000 + ----------- 3
150-160 ------- ------- 1306年至1407年3000 + - ---------- 3-4
180 ------------- 1806-2204 ------- 2600 + ---- -------- 4
210 ------------- 2204至2206年------- ------ 2300至2700年5
250 ------------- 2204年至2208年------- ------ 2000-2300 6
330-350 --- ---- 2208至2212年------- ------ 1500-1600 7-8
450-500 ------- ---- 2212-2216 --- 800-1000 -------- 9-12
建議購買一些電機蓋備件(如第三張照片所示)。電機蓋將螺旋槳蓋住并保持在適當的位置,如果蓋子沒有擰緊,可能很容易脫落(強烈建議使用扳手將其完全擰緊)。尋找掉落的馬達帽特別是在草地上可能很麻煩。如果電機蓋脫落,它通常會靠近你的四軸飛行器。尋找它并且離無人機不遠。
嘗試購買不同顏色的電機以區分旋轉方向。 2個電機順時針旋轉,2個電機逆時針旋轉,具體取決于您將其連接到3相ESC輸出的方式,稍后將在硬件設置部分討論。
步驟6:1.5電子速度控制器(ESC)
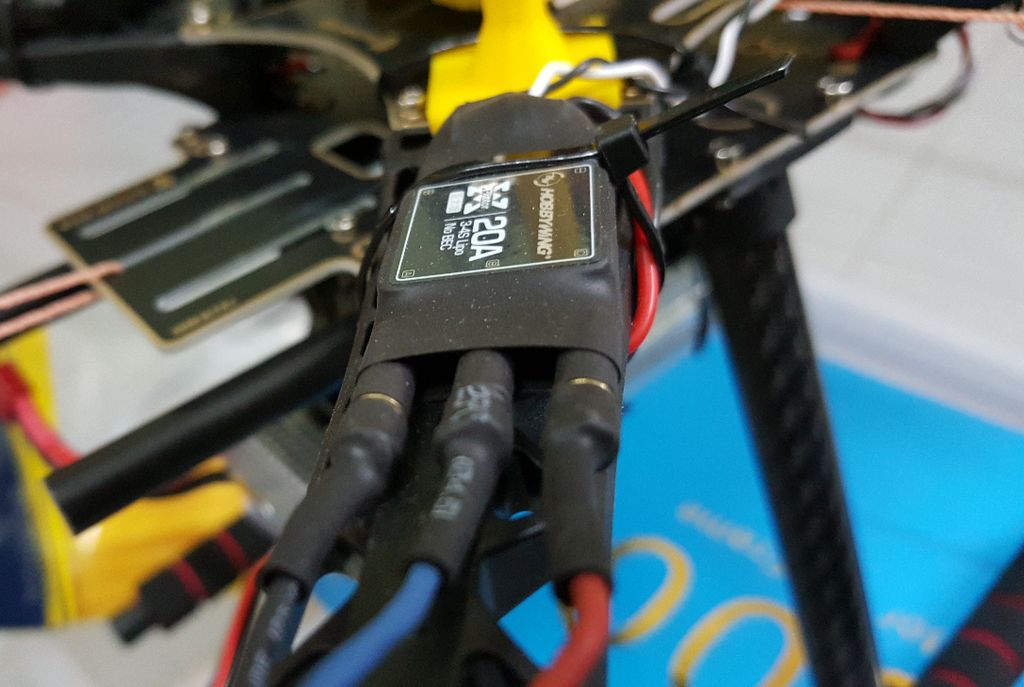

電子速度控制器(ESC)根據飛行控制器伺服導軌的輸出吸取電流來驅動轉子。 ESC按其允許通過的最大電流等級進行分級。因此,ESC的選擇應該是ESC等級是轉子最大額定值的1.2到1.5倍。例如,由于所選電機最大吸收15安培(從電機數據表中獲取最大電流消耗或供應商提供的電流額定規格),每個轉子的20安培電流就足夠了,不會導致任何過熱或燒壞。根據下面的等式,
ESC額定值/最大電機額定值= 20/15 = 1.3333
上述等式最好產生1.2到1.5范圍內的值。由于最大電流消耗很少,因此ESC的20 A足以使ESC超過電機電流額定值。
建議在沒有電池消除電路(BEC)的情況下使用ESC。 navio2飛行控制器可以通過伺服導軌為ESC電路和接收器提供電源。因此不需要BEC。但是,如果你的ESC帶有BEC,它仍然可以使用。按照“無人機硬件設置”部分中的步驟對終端進行隔離。
步驟7:1.6螺旋槳


必須根據預期的可靠性選擇螺旋槳,然后根據電機速度調整尺寸(參考組件1.2中的圖像指南。碳纖維螺旋槳具有更高的質量,但可能不一定值得花費。畢竟,碳纖維螺旋槳也會在類似的沖擊環境下破裂。另一方面,較軟的螺旋槳甚至可能更靈活,更不易“脆弱”。它們在抵抗空氣方面也不那么硬,因此可以更好地減少大型無人機中電機加熱的可能性。相對較大的機身為485毫米(包括螺旋槳保護器在內的580毫米),選擇的轉子速度較低,為950千伏,螺旋槳尺寸相應較大,為12英寸或30.48厘米。螺旋槳在螺旋槳平衡器上使用額外的電氣膠帶進行平衡,以確保兩個葉片質量相等。這可以最大限度地減少不平衡螺旋槳可能產生的振動。將螺旋槳安裝在螺旋槳平衡器上,關閉風扇,然后用較輕的螺旋槳葉片的末端粘貼,直到達到平衡。您可以將磁帶移過刀片的長度,找到完美平衡的位置。在平衡時,始終確保螺旋槳運動不受限制。它應該能夠在螺旋槳平衡器上自由擺動,即使是最輕微的微風。螺旋槳平衡器的抓地力不能太緊。
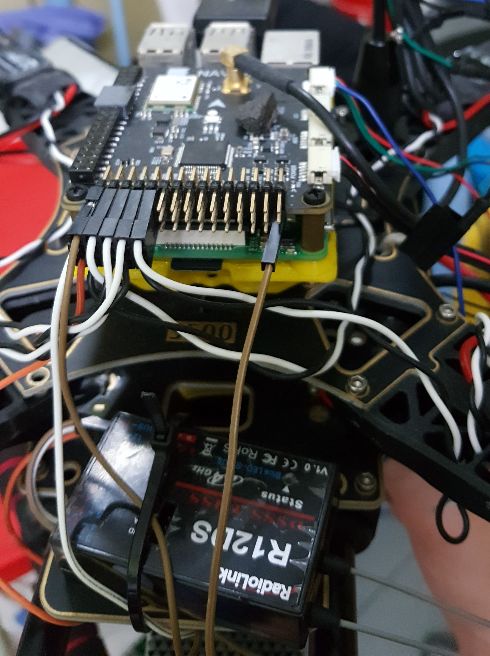
步驟8:1.7帶天線的GNSS接收器


全球導航衛星系統(GNSS)接收器是Navio2中的內置GPS(和其他衛星)接收器。它需要一個高度遠離飛行控制器的天線,以避免組件產生的磁干擾,從而導致GPS故障或衛星信號接收不準確。 GPS支架是安裝天線的地方,而另一端通過微型同軸(MCX)連接器連接到飛行控制器的GNSS接收器。微型同軸連接器將附帶購買的GPS天線裝置,但GPS支架必須單獨購買,或在線3D打印。建議您在線購買,因為當您想在校準期間將無人機倒置時(例如右圖所示),這些設計是彎曲的。
步驟9:1.8發射器

高級變送器是實現飛行車輛良好控制所需要的。這是至關重要的,否則,在溝通受損后可能導致致命傷害。 Radiolink AT10II系列是迄今為止該公司開發的最先進的發射器,提供直接序列擴頻(DSSS)和跳頻擴頻(FHSS)無線電通信協議與接收器的混合,然后通過串行與飛行控制器通信總線(SBUS)單通信電纜。變送器可以使用供應商提供的小型2200 mAh Li-Po電池供電,以節省電池更換成本。發射器還將配備一對接收器。
步驟10:1.9接收器

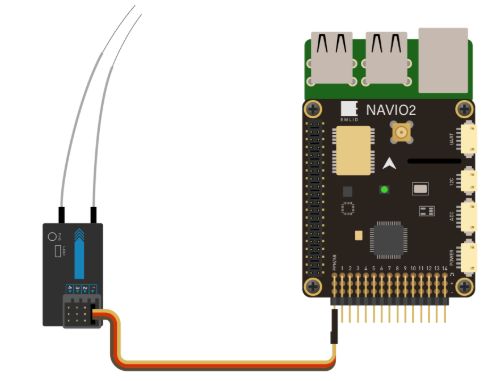
強烈建議使用收發器對,其接收器可以通過SBUS通信協議與Navio2通信。我使用的R12DS接收器接收來自發射器的信號,然后通過SBUS通信協議將信號中繼到飛行控制器。 SBUS是Navio2支持的新型單線通信協議(可以節省大量雜亂的布線)。一條信號線將所有12個信道的所有無線電值從接收器(其又從發射器無線傳輸)發送到飛行控制器。 Navio2具有內置解碼器,可在將SBUS RC輸入值傳遞給Ardupilot之前對其進行解碼。要將接收器連接到飛行控制器,您需要三個母對母跳線將SBUS線路的信號,正負端子從接收器連接到相應的信號,伺服導軌中的正負端子。 Navio2飛行控制器。使用較短的跳線以獲得更好的整潔。
步驟11:1.10 MicroSD卡

類似于需要硬盤的電腦磁盤驅動器(HDD)或最新的固態硬盤(SSD)作為存儲,Raspberry Pi使用microSD卡,其中安裝了操作系統(Raspbian)。它包含存儲系統數據的關鍵文件,例如連接IP地址,具有不同功能編碼的文件目錄等。
AliExpress會員鏈接購買32GB microSD Sandisk:AliExpress.com產品 - SanDisk Ultra A1 Microsd Memory卡200GB 128GB 64GB 32GB 16GB microSDHC/SDXC UHS-I 98MB/s TF卡micro sd cartao de memoria
Amazon Affiliate Link購買32GB microSD Sandisk:https://amzn.to/2V8hb42
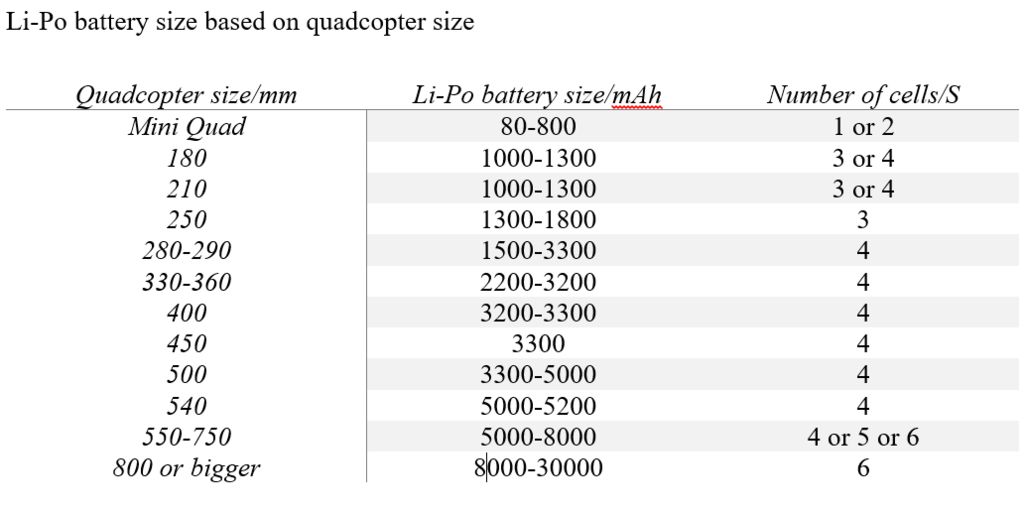
步驟12:1.11鋰聚合物(Li-Po)電池
鋰電池具有最高功率之一重量比,使其成為無人機動力的最佳選擇之一。但是,必須徹底處理鋰電池并監控其電壓,以便每個電池在充電前至少保持3V(安全為3.4V)。
使用的Li-Po電池是5200 mAh電池,額定電流為25 C.為了確定放電極限C是否足以用于所使用的電動機,最大放電電流由下式計算得出。
I_max = C× Ah = 25× 5.2 = 130A
此選擇符合ESC和電池尺寸,每個ESC等級為20 A,一次最多可從電池中抽取80 A(對于帶有4個電機的四軸飛行器)。應用全油門的情況很少見,因此25 C電池的130 A就足夠了。
Li-Po電池尺寸的選擇必須考慮到直升機的尺寸以達到最佳效果。飛行時間。如果大型無人機由相對較小尺寸的電池供電,則飛行時間將受到限制。如果小型無人機由大電池供電超出最佳范圍,則由于分配的額外重量,電池消耗更快。 Li-Po電池的選擇最好根據表格來實現最大可用飛行時間。
您還必須購買適合焊接在配電板上的電線連接板和電源模塊之間。使用T型連接器電池。如果選擇這種類型的連接器,也應相應地選擇Li-Po充電器和電源模塊的T型連接器頭。建議使用專業的鋰電池充電器,因為它可以監控整個充電過程中的充電電壓和電流,以避免過度充電。它還可以在發生故障時觸發警報。
重要提示!購買前,請務必檢查連接器是否與APM電線和電源模塊的連接器類型相匹配。如果您使用的是T型連接器,則所有提到的組件都必須具有T型連接器。如果要使用XT60連接器,則所有提到的組件都必須具有XT60連接器。如有疑問,請在購買前詢問經銷商有關連接類型的說明。
步驟13:1.12低壓報警

為了保護鋰電池免受過放電的影響,BB報警 - 當Li-Po的任何電池的電池電壓降至設定值以下時發出響亮的警告 - 用于監控電池電壓。如果允許電池在每個電池3 V以下放電,它可能會永久損壞,永遠無法再次充電。
步驟14:1.13電源模塊
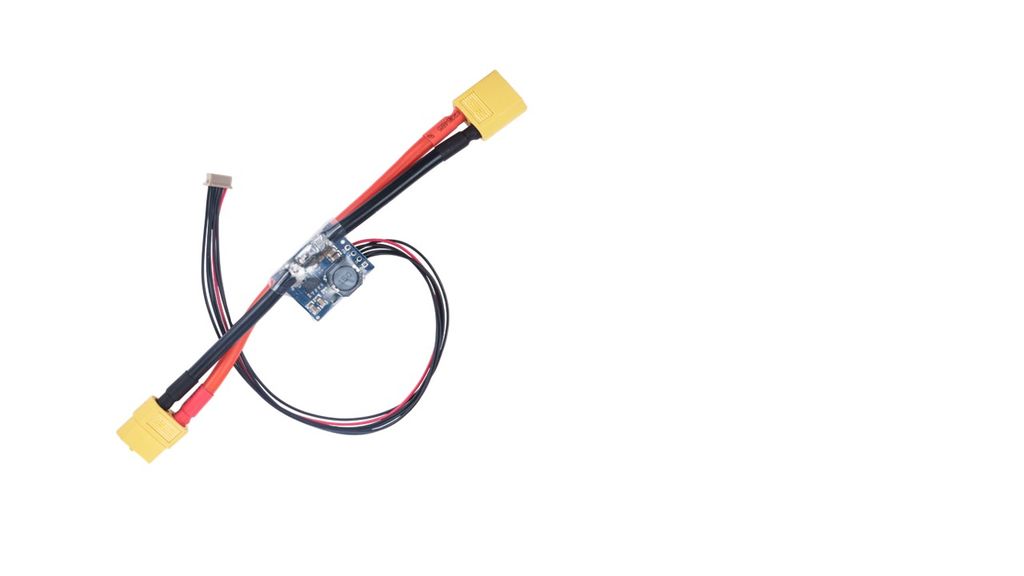
因為相同的Li-Po電池同時提供Raspberry Pi和電機,電源模塊根據最佳要求控制兩者之間的電壓。電源模塊將電池電流分配到配電板(到ESC)和navio2飛行控制器中的電源端口。應仔細選擇電源模塊,使連接器與電池的連接器匹配。如果購買的電池還帶有T型連接器,則使用帶有T型連接器頭的電源模塊。
重要說明!同樣,在購買之前,請確保檢查連接器是否與電池和配電板(PDB)的連接器匹配。
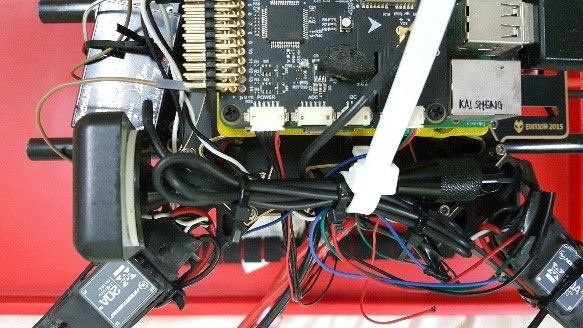
第15步:1.14遙測

無線電遙測包括一個通用串行總線(USB)接地模塊,用于連接到您的筆記本電腦的地面控制站(GCS)和通用異步接收器 - 發射器(UART)空氣模塊連接到navio2飛行控制器。 GCS的目的是規劃飛行路徑并監控飛行數據。如果UART端口的串行線路必須用于其他目的,例如避障,或者UART端口的GPIO 17用于安裝關斷開關,遙測的空氣模塊可以與之相互替換。接地模塊,接地模塊的USB頭連接到RPi3。空氣模塊的UART需要額外的USB-TTL CP2012轉換器才能通過Silicon Labs CP210X USB-UART橋驅動器與GCS或計算機進行通信(可在線下載)。購買CP2012轉換器的Amazon Affiliate鏈接(可選):
https://amzn.to/2Wk33t0
Amazon Affiliate購買遙測模塊鏈接:https://amzn.to/2Lx6rYN
AliExpress聯盟鏈接購買Navio2的MicroHeader引腳:
AliExpress.com產品 - CUAV U-BLOX NEO-M8N高精度GPS,帶有兩個6針+4針DF13 1.25插頭,適用于Navio2自動駕駛儀
Amazon Affiliate Link為Navio2購買MicroHeader針腳:
https://amzn。到/2QBL37l
步驟16:1.15 FPV和攝像機

良好的攝像頭和云臺將使您能夠在飛行中拍攝精彩的FPV。
只有在成功穩定無人機后才考慮購買好的相機和萬向節。
Amazon Affiliate Link購買3軸萬向節/相機支架(可選):https://amzn .to/2RbA2MG
相機持有人:https://amzn.to/2SfP0P2
相機:https://amzn.to/2SfP0P2(分辨率與價格成比例)
步驟17:2.0推力 - 重量比
計算四軸飛行器的推重比對于確保四軸飛行器可以起飛和用所需的有效載荷穩定飛行。
步驟18:計算四軸飛行器的“空載”重量
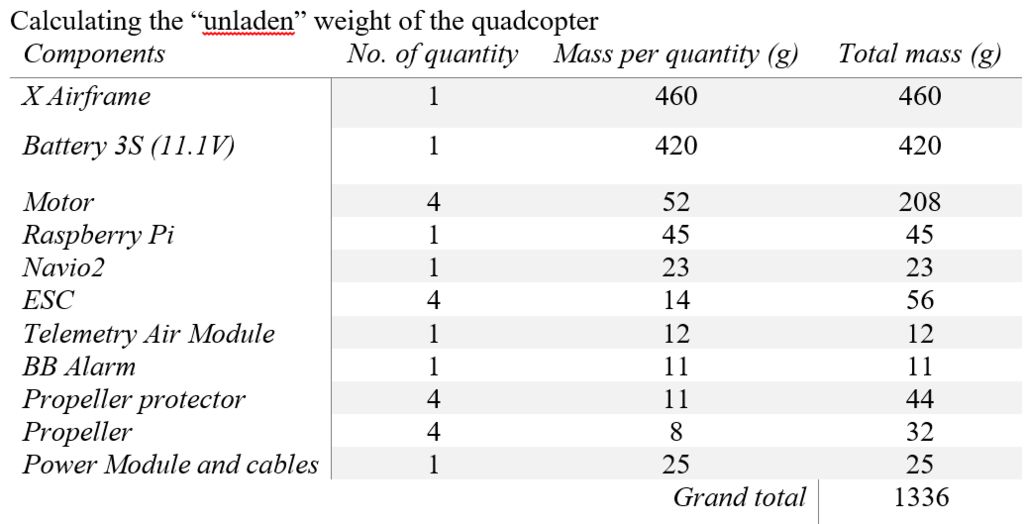
沒有四軸飛行器的總空載質量任何有效載荷約為1.336千克,如上表所示。
步驟19:計算生成的推力的公式
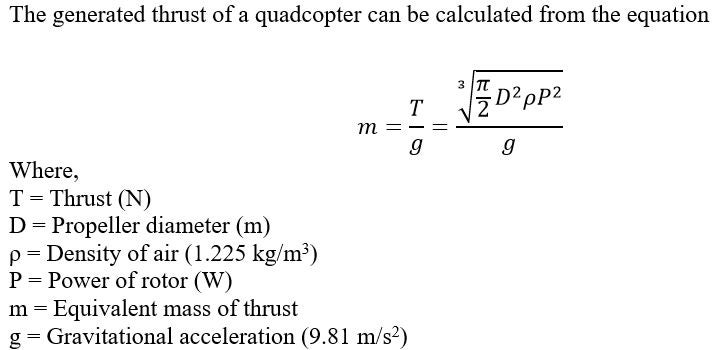
為了使無人機能夠起飛,轉子總產生的推力必須超過該值,或者更好,是該值的兩倍。
總推力= 2×四軸飛行器的總重量
步驟20:計算推力重量比
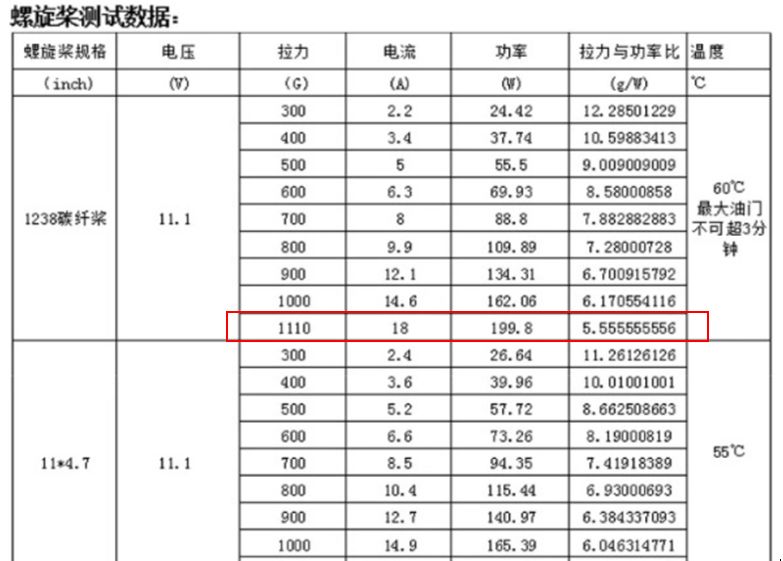
每個電機的推力也可以是直接從電機數據表中獲得。如上表所示,給定的推力的等效質量為1110g,最大為18A的電流吸引到每個轉子。從這里,推力的總等效質量可以通過簡單地將推力乘以4轉子來計算,給出m = 4×1.11 = 4.44kg。當油門上升時功率上升得更快,推力功率比降低,最高油門時功率下降最小值為5.55 g/W.
沒有任何有效載荷比的四軸飛行器的推重比
=(等效推力質量)/(四軸飛行器的飛行質量)
= 4.44/1.34
= 3.4
步驟21:3.0 Navio2硬件設置
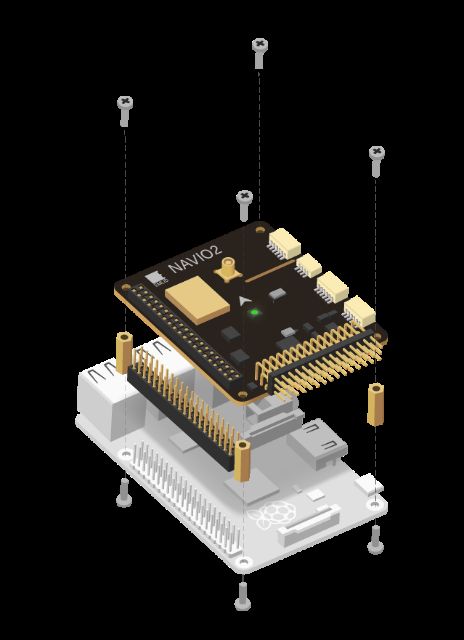
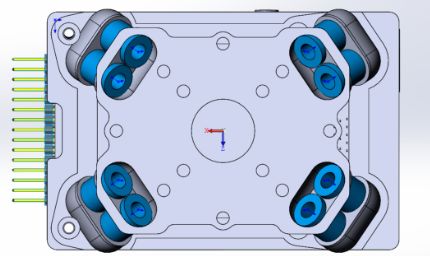
第一步是為Ardupilot設置RPi3。將Navio2護罩堆疊在RPi3上,并將螺釘固定到位以牢固地固定兩者。 Navio2和RPi3一起作為四軸飛行器的FC。同時,打印出一個3D模型支架,通過該支架將FC固定在四軸飛行器的機身上。支架的兩個部分通過8個減震球粘合在一起。為PDF文件“Drone BOM list”中的完整組件列表提供的鏈接也包括這些球。
鏈接支持部件到3D打印
頂部:https://github.com/emlid/hardware/blob/master/Vibr.。。
Bottom:https://github的.com/emlid/硬件/斑點/主/振動干燥。。.
步驟22:​插入吸震球以將2個印刷支架部件固定在一起
插入用于將2個印刷的支架部件固定在一起的減震球,對球不要太溫和,否則將永遠完成任務。注意,這些球是柔韌和可拉伸的。利用像小型艾倫內六角扳手這樣的薄工具推動球的尖端,使它們卡在頸部,進入兩個印刷部件之間的孔中,這兩個部件已正確定位,如上圖所示。重復另外7個球,每個角落2個球。然后,使用提供的螺釘將Raspberry Pi背面連接到印刷支架的上表面(具有較大表面積的支架)。
Amazon Affiliate Link購買阻尼球:
https://amzn.to/3122Kl3
AliExpress會員鏈接購買減震球:
AliExpress.com產品 - 4個通用防振球阻尼橡膠球震動Quadcopter四軸攝像機Gimbal GoPro Hero Drone的吸收器
步驟23:4.0無人機硬件設置
完成上一步后,離開Raspberry Pi(與Navio2航班堆疊)控制器)與支架一起然后繼續設置機身。
如果您愿意嘗試,可以先嘗試組裝機身,但在電機和電機之后必須拆卸它以進行焊接。 ESC到達。
您的機身應包含配電板。找到板的表面,其圓形銅端子標有正負號,用于焊接組件。使用萬用表的連接測試來測試所有正極端子是否連接,所有負極端子也是如此。我使用焊接表面朝上,所以我需要確保在焊接電纜時,它們不會妨礙連接到頂部中央橫臂連接器的任何螺釘開口。在配電板上找到合適的正極和接地端子,將電源模塊和所有4個ESC焊接到配電板的每個角落。所有4個電調和電機都是相同的,可以連接到任何地方,因此您無需擔心它們中的哪一個連接到哪個角落。將紅色電纜焊接到電路板上的正極端子,將黑色電線焊接到電路板上的負極端子。中央電纜(通常)是連接到navio2飛行控制器的信號電纜。
確保正極和負極端子不會短路并在焊接后再次測試連接性。使用更多焊料固定到電路板的連接,并通過輕輕拉動電纜來測試連接。完成后,配電板應該看起來像一塊帶有懸掛螺紋連接牢固的板,4個ESC和1個電源模塊。這些組件中的每一個都通過2條線連接 - 紅色表示正極,黑色表示負極。
步驟24:4.1
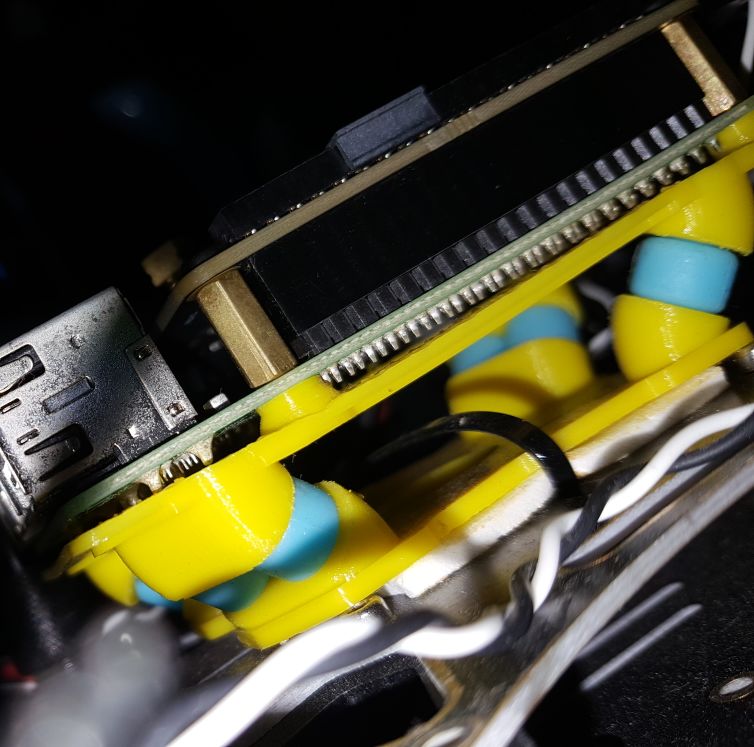
然后,使用合適尺寸的內六角扳手將頂部中央橫臂連接器與四軸飛行器臂組裝在一起,然后將組合結構與配電板連接。如果您決定將焊接表面朝上(與其他接線短路的可能性較小但需要拆卸機身以進行重新焊接,這可能非常罕見),請調整ESC的接線,使其不會阻塞連接點。現在,使用厚雙面膠帶將包含Raspberry Pi 3和Navio2的支架安裝到中央橫臂連接器上。
步驟25:4.2

將電機安裝在每個四軸飛行器臂的末端和螺旋槳保護器(可選)上,三相線向內平行于每個四軸飛行器的臂。使用提供的螺釘將它們緊緊固定到位。
步驟26:4.3
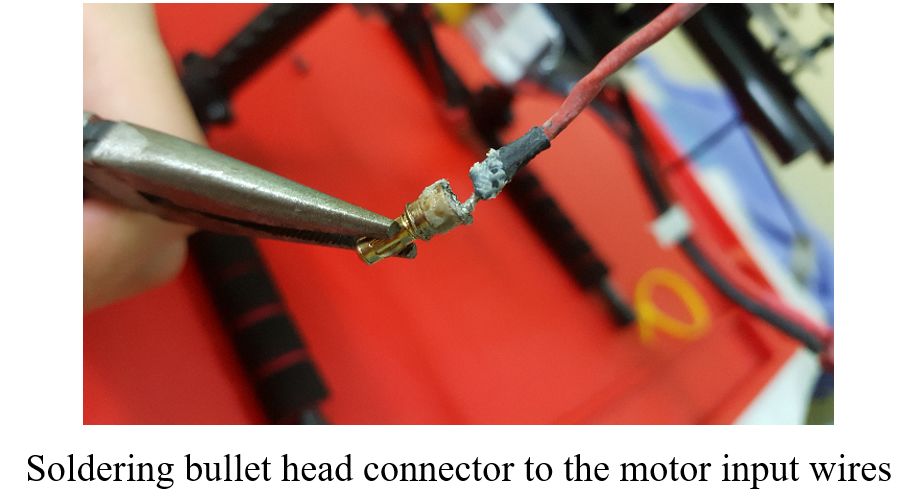
然后,如果電機做的話沒有容易焊接的子彈連接器,將子彈連接器焊接到電機的每根三相電線的末端。要做到這一點,使用薄頭鉗來固定子彈頭連接器(在焊接過程中可能非常熱),然后將焊料熔化到圓柱形開口中。在焊料硬化之前,將電線從電機推入子彈頭連接器。
步驟27:4.4

在移動之前,保持幾秒鐘讓焊料完全硬化。嘗試用力來測試連接強度。連接松動可能導致中途飛行中的電機故障,導致崩潰。如果供應商提供了用于絕緣的熱縮管,則切割足夠量的管并將其放置在子彈頭下方暴露的金屬部件(連接焊料)上,然后從焊槍或打火機施加熱量以收縮并覆蓋它。否則,請使用電氣絕緣膠帶。
步驟28:4.5

接下來,確保每個ESC安全使用電纜扎帶的四軸飛行器的每個臂的頂部(或底部)表面。然后,現在,通過施加相當大的強度,將無刷直流電機的三相線的子彈頭連接器(可以是其他類型的連接器)隨機連接到ESC的3個輸出。到BLDC電機的三相準AC輸入將交替地磁化定子中的可激勵線圈中的線圈,使得它們排斥永磁體(轉子)轉動。電機三相輸入的順序將決定電機的旋轉方向。為了確保ESC輸出正確的交流電流序列以使電機按要求方向轉動,您需要稍后進行測試。
步驟29:4.6
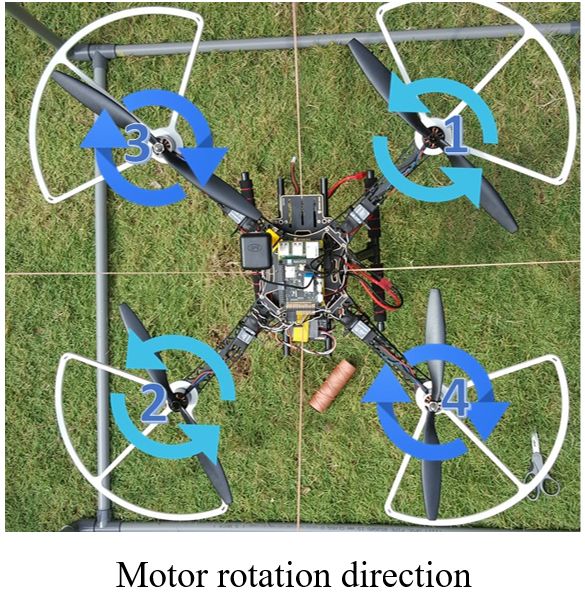
當你的四軸飛行器第一次裝備時(在你完成所有步驟之后),所有螺旋槳都被移除,你需要確保方向每個電動機的電動機旋轉如下。如果任何電機沒有按要求旋轉,只需將從電機(旋轉方向錯誤)隨機連接的任何2根電線與其電源ESC互換。用手指感覺所有電機在校正方向上旋轉,如
1。右前 - 逆時針
2。左后方 - 逆時針方向
3。左前方 - 順時針方向
4。右后方 - 順時針方向
步驟30:4.7

但這只是其中之一你還要做的最后幾步,還有很多工作要做。將此部分保持在最后(此后將再次提醒您)并繼續執行以下操作。
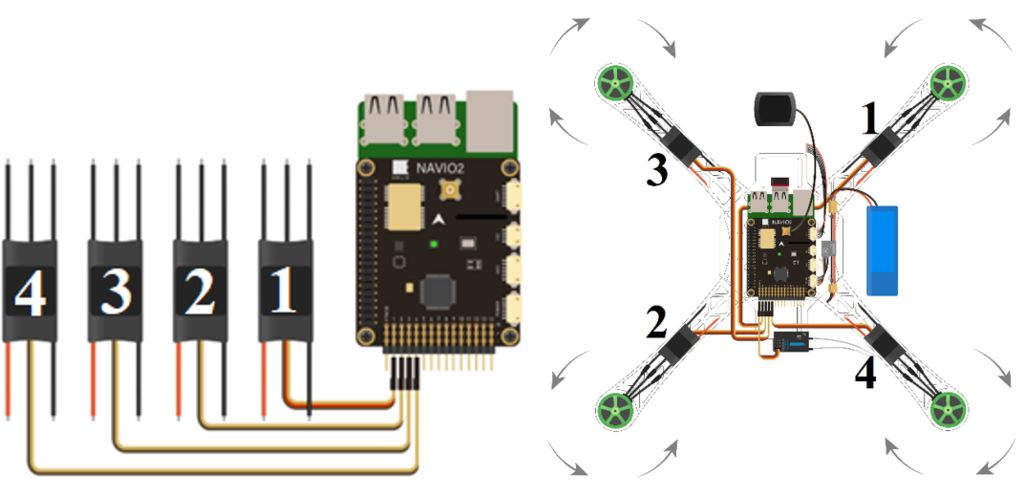
在此之前,您需要將ESC連接到飛行控制器的伺服導軌,如上圖所示。請參閱鏈接中的Emlid文檔:
docs.emlid.com/navio2/ardupilot/hardware-setup/
您現在應該將您的ESC正負輸入焊接到配電板,中央信號線應連接到伺服導軌。現在,每個ESC的連接必須是特定的。從伺服導軌的左側看,最左邊的列是SBUS通信線(我們稍后會處理它)。第二列,第三列,第四列和第五列分別用于第一,第二,第三和第四ESC。請根據上面的Emlid提供的圖表連接它們。
步驟31:4.8
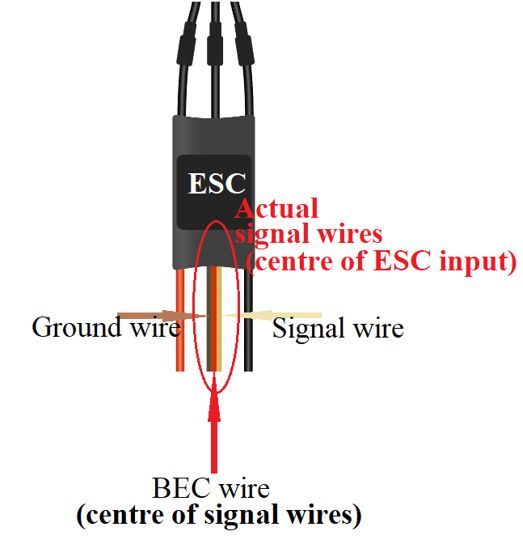
讓我們將ESC的中心線命名為信號線。信號線由實際信號線,BEC線和地線組成。
信號線(ESC的中心)由2根線(用于沒有BEC的ESC)和3根線組成(用于帶有ESC的信號線) BEC)。如果您的ESC沒有BEC,它將沒有中央BEC線。信號線的中心是空的。如果您的ESC具有BEC,則BEC線通常是“中心的中心”。它通常是3根信號線的中心線,位于ESC輸入的中心。
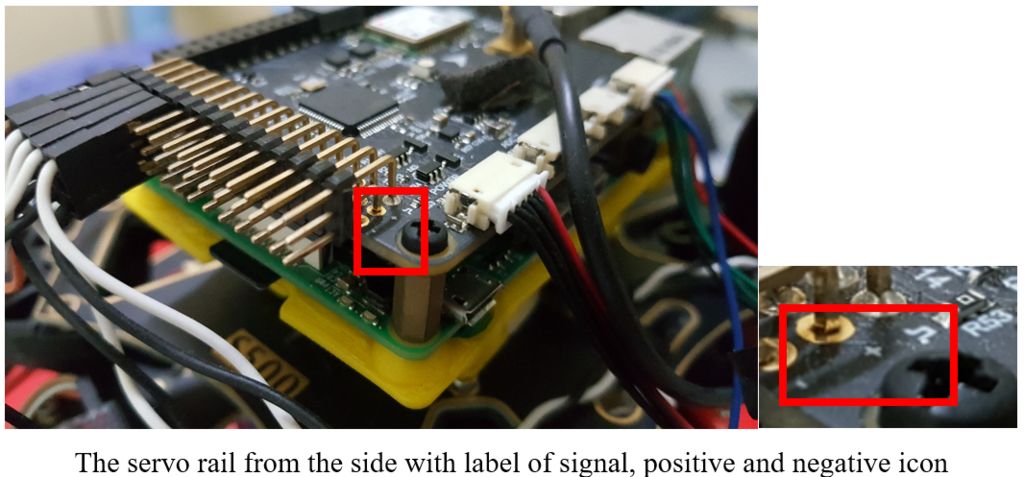
如果你的ESC有一個電池消除器電路(BEC),只連接你的第一個ESC的BEC線(可以是任何其他只有一個的ESC),如左圖所示,如左圖所示從第一個ESC延伸的橙色線。對于其他ESC,BEC電纜被切斷并絕緣(不要切錯 - 僅“中心”)。這意味著只有一根中央信號線的ESC中心線(BEC線)連接到伺服導軌。來自其他3個ESC的其他BEC線被移除。這樣只留下第一個帶有3根信號線的ESC(帶有BEC線,實際信號線和地線),其余的ESC帶有2根信號線(帶有實際的信號線和地線)。我們知道通常“中心”是BEC線,但為了區分實際的信號線和地線,你必須測試它。再次,在你操縱四軸飛行器之后,這樣做。如果您的電機不能按照變送器命令工作(您可以聽到速度的變化),那么您的連接是錯誤的。根據經驗,黑色或深色線通常是地線。在伺服軌側,信號,正極和負極分別標記為頂部,中間和底部行。中間(正)行是剩余的一條BEC線(如果有的話)應連接到的位置,而實際的信號線應連接到標有方波信號圖標的第一行(相應列)。最后,接地線應連接到伺服導軌最后一排的相應列。
如果您的ESC沒有BEC,則無需移除或添加任何東西。
步驟32:4.9
要將接收器連接到飛行控制器,您需要三個女性到-female跳線將SBUS線路的信號,正負端子從接收器連接到Navio2飛行控制器伺服導軌中的相應信號,正負端子。標記為“PPM/SB”的第一列或最左列分別為第一,第二和第三線上的SBUS通信提供信號,正和負端子。使用較短的跳線(為了更好的整潔)將它們連接到接收器中的對應物。用扎帶固定接收器。
步驟33:4.10
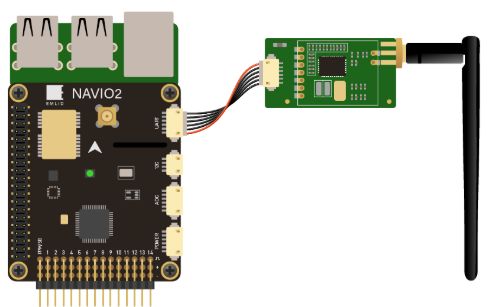
連接ESC,電機后,電源模塊和接收器與機身,我們留下遙測模塊,GPS天線和電池。遙測模塊成對出現 - 一個空氣模塊和另一個接地模塊。空氣模塊通常帶有一個UART微型插頭引腳連接,可連接到navio2的UART端口,如下圖所示,而接地模塊則帶有USB連接器以連接到PC。
步驟34:4.11
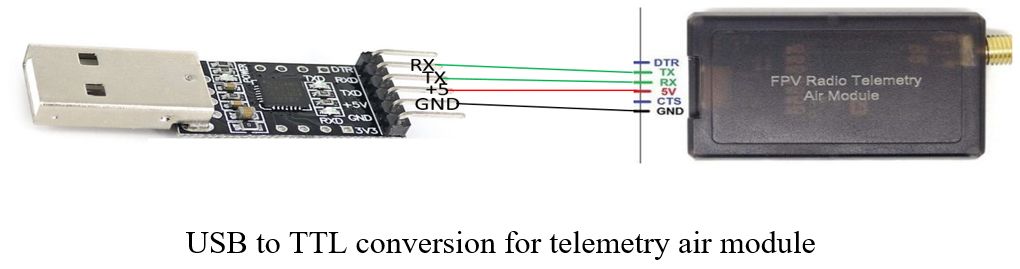
(如果以正常方式連接,請跳過以下部分)盡管如此,您可以互換空氣接地模塊通過將接地模塊(帶USB連接器)連接到Raspberry Pi,將空氣模塊(帶UART連接器)連接到PC。后者需要額外的USB-TTL CP2102轉換器,以便空氣模塊可以連接到PC的COM端口。空氣模塊與轉換器的連接需要焊接,如下圖所示。
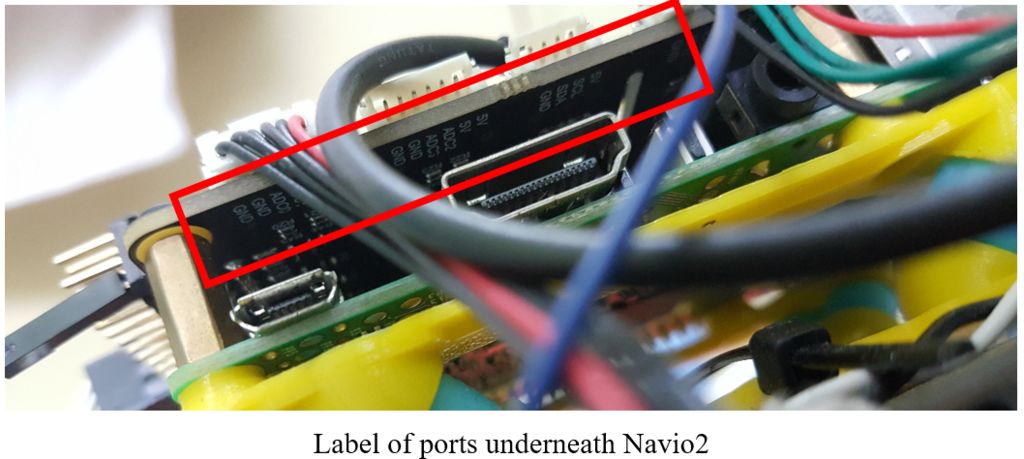
USB-TTL轉換器上的標簽清晰正確,但在空氣模塊上,封面內的標簽可能不準確。保持遙測空氣模塊側的微型插頭引腳,并切斷連接到UART端口的微型插頭引腳。從它們與Navio2的UART端口的連接來看,我們可以準確地知道哪條線是TX,RX,5V和GND。端口標簽可以在Navio2板下面找到,或者如下所示。連接到UART端口上的RX的電線連接到空氣模塊上的TX端子,而連接到UART端口上的TX的電線連接到空氣模塊上的RX端子。基于類似的工作原理,空氣模塊上的TX端子應焊接到連接到USB-TTL轉換器RX的跳線,反之亦然。
步驟35:4.12
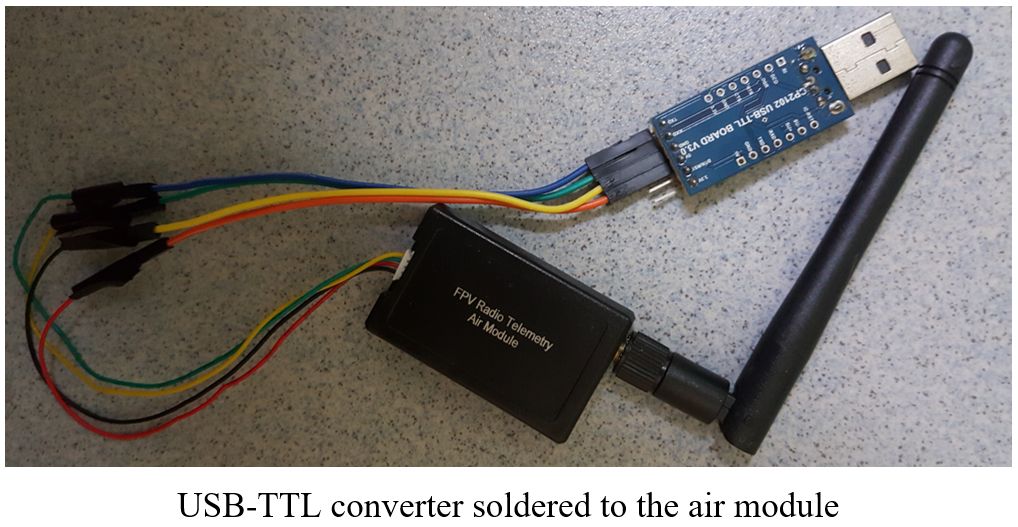
連接5V和接地引腳后,空氣模塊上的LED將開始閃爍,表示整個電路為空氣模塊供電。確保轉換器的RX引腳連接到遙測空氣模塊的TX,同時轉換器的TX引腳連接到空氣模塊的RX。當空氣和地面模塊彼此通信時,完成連接將顯示LED的穩定亮度,但這并不意味著遙測可以在傳輸GCS數據方面起作用。要實現這一點,必須通過登錄微型計算機操作系統對RPi3進行微小設置。
從“ etc/default/arducopter”文件,連接配置已更新以允許此操作。當您在“連接到地面控制站(GCS)”
”部分進行設置時,將在后面的步驟中顯示詳細信息。步驟36 :4.13

GPS支架是安裝天線的地方,而另一端通過飛機控制器的GNSS接收器連接微型同軸(MCX)連接器。
步驟37:4.14
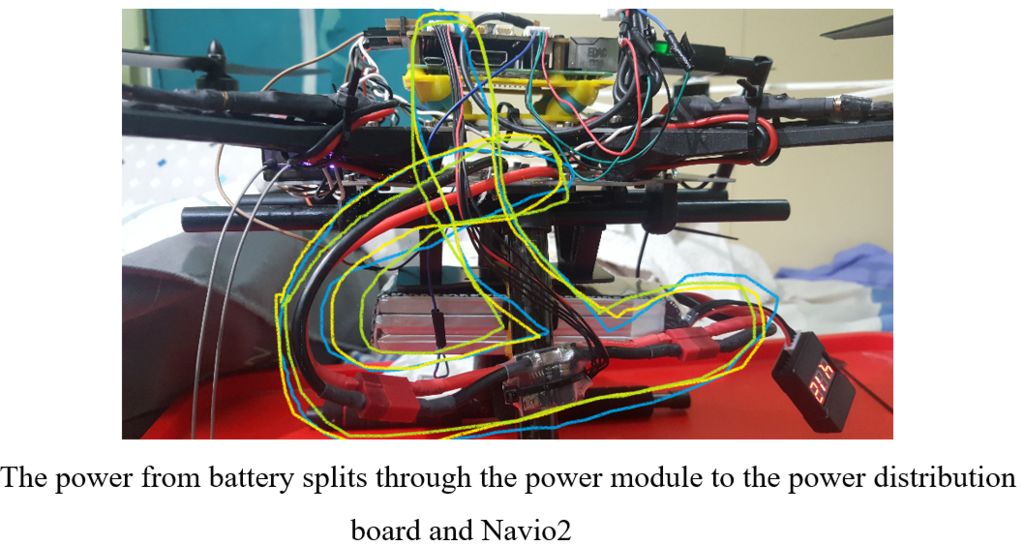
電池牢固地系在電池座下面使用連接系帶/電池連接電源并連接到電源模塊,如下所示。現在應將電源模塊的其中一個輸出焊接到配電板上。另一個輸出,一個從電源模塊分支出來的6針微型插頭,現在連接到navio2飛行控制器的電源端口,如上圖所示。
步驟38:4.15
連接電池后,您將成為啟動Raspberry Pi,Navio2,接收器和遙測。 Navio2將閃爍LED,其顏色將決定飛行控制器的不同條件。遙測模塊具有閃爍的LED,當與地面對應物建立連接時,該LED變為穩定。接收器還應具有指示其供電的LED。
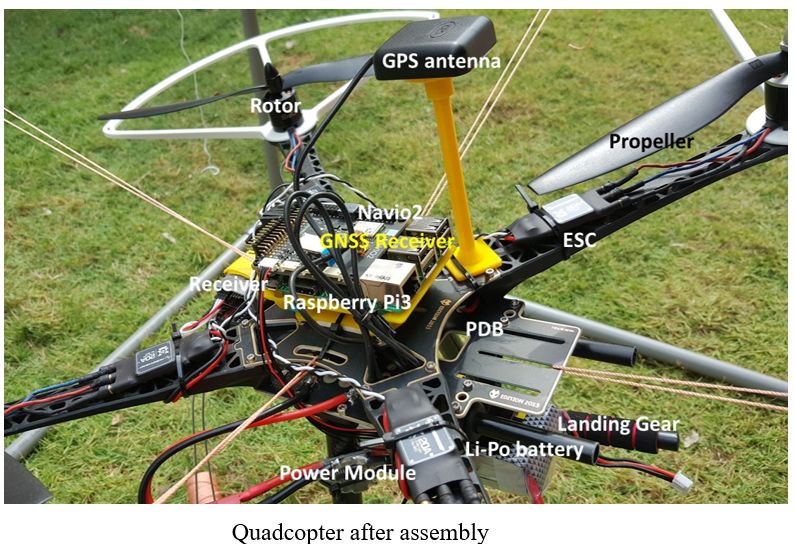
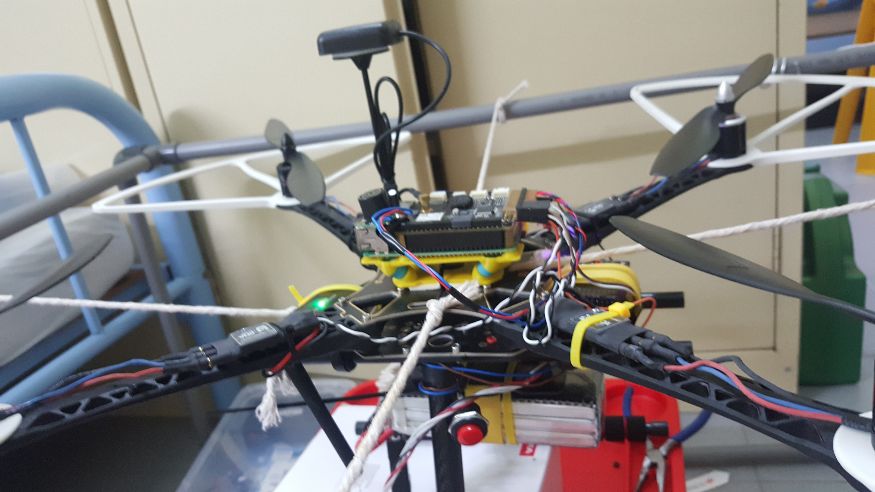
組裝的四軸飛行器如下所示。請記住使用扎帶將所有松散的部件牢固地系在一起。然后,在完成所有硬件設置后,您需要執行一系列軟件設置,網絡配置和飛行校準,然后才能將其設置為首次飛行。
步驟39:5.0將操作系統閃存到MicroSd卡

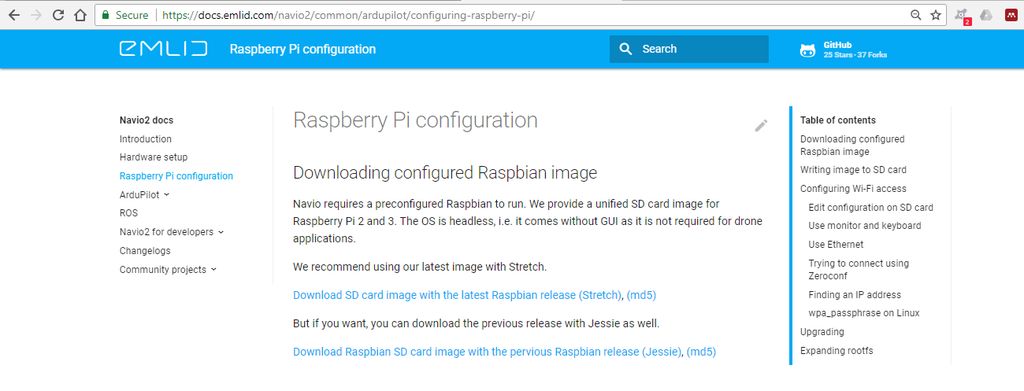
將用作微型計算機RPi3的microSD卡,必須安裝Raspbian操作系統(OS)。選擇合適的16GB或32GB大小。訪問
https://docs.emlid.com/navio2/common/ardupilot/configuring-raspberry-pi/上的Navio2開發人員文檔,并將操作系統映像下載到您的計算機。記住存儲文件的位置,因為下載的壓縮文件將在以后“閃存”到您的microSD卡上。
步驟40:5.1
然后,我們需要一個軟件將下載的操作系統刷入microSD卡。訪問https://etcher.io/下載并安裝Etcher。提取Etcher文件并在您的PC上運行。
步驟41:5.2
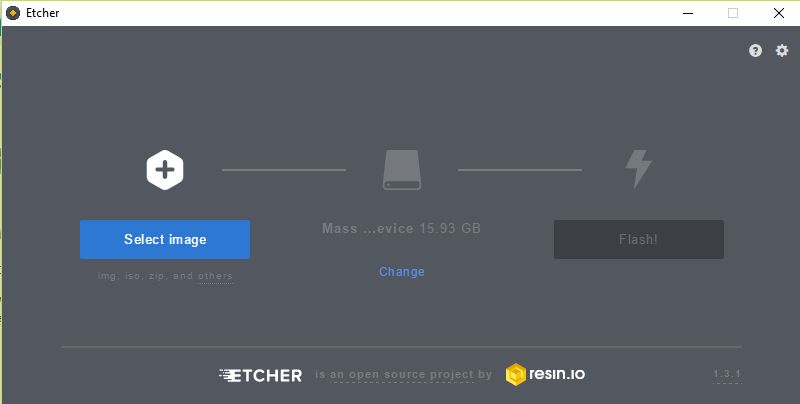
我們運行Etcher后,所選歸檔文件中的操作系統映像被“閃現”進入microSD卡。結果發現,此過程可能與某些需要使用其他PC的PC不兼容。
使用合適的讀卡器或microUSB將新的或新格式化的microSD卡插入PC適配器。通常Etcher會自動選擇microSD卡作為閃存設備。否則在選擇操作系統映像之前將設備更改為microSD卡。
步驟42:5.3
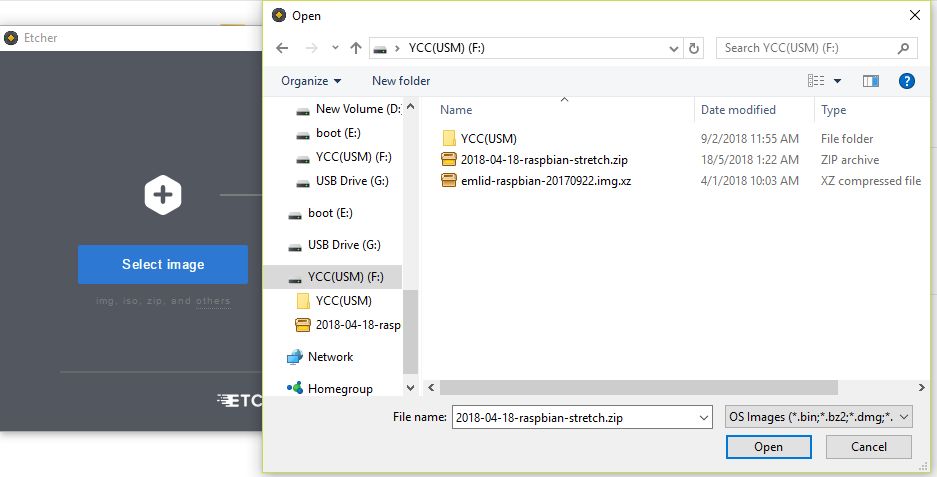
選擇從您下載的操作系統映像zip文件。然后在點亮后點擊閃爍!
步驟43:5.4
這是閃存操作系統所需的全部內容將圖像發送到microSD卡。 Ardupilot的操作系統映像很簡單,沒有花哨的GUI,并且易于使用。請注意,您的microSD卡現已分區,以便使用Navio2 Flight Controller。如果您希望對其進行格式化(如果以某種方式在閃爍后或多次啟動后它會損壞),請記住在格式化后刪除分區。 AOMEI分區管理器等軟件可用于此目的。
在“flash”之后,您的microSD卡現在可以插入Raspberry Pi3,然后開始網絡配置設置,然后是安全shell( SSH)使用PuTTY將Raspberry Pi連接到筆記本電腦。
步驟44:6.0 Raspberry Pi Wi-Fi網絡配置設置
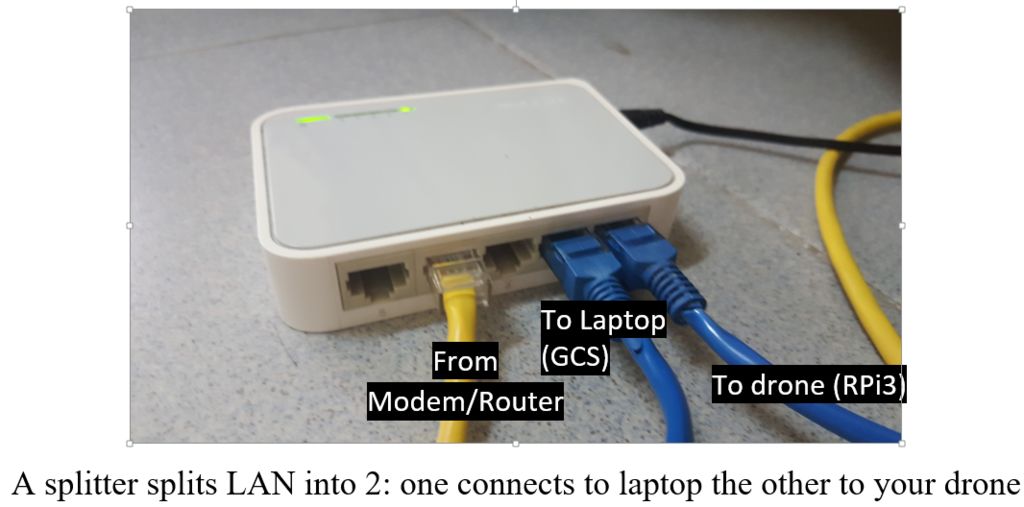
要將Raspberry Pi安全保護到您的筆記本電腦,您需要將Raspberry Pi和筆記本電腦連接到同一個LAN網絡 - 無論是通過無線(Wi-Fi)還是通過有線(以太網)連接。
讓我們開始將Raspberry Pi連接到互聯網。如果使用LAN(或以太網)電纜,則更容易。將RPi和筆記本電腦連接到同一LAN電纜端口,這需要您使用LAN電纜分配器。將LAN端口拆分為2條LAN電纜。一個連接到您的筆記本電腦,另一個連接到您的RPi。就像在PC上一樣,如果您使用以太網電纜連接到互聯網,則無需在Raspberry Pi微型計算機上執行WPA網絡配置(安全性),因此您可以跳過以下步驟。
步驟45:6.1
否則,如果您沒有拆分器或者您沒有使用LAN電纜端口,那么按照下面的無線配置步驟,就像您將PC連接到無線網絡一樣 - 它只是比通常將您的日常設備連接到Wi-Fi更復雜。
請請注意,此網絡配置設置僅用于將Raspberry Pi連接到Wi-Fi網絡,以便它與您的PC共享與PC連接的網絡。它與您通過遙測模塊進行的地面控制站(GCS)通信所執行的網絡配置不同,稍后將對此進行討論。
如前所述,如果您使用的是以太網電纜,可以跳過以下步驟直接轉到“筆記本電腦上的SSH Raspberry Pi”。
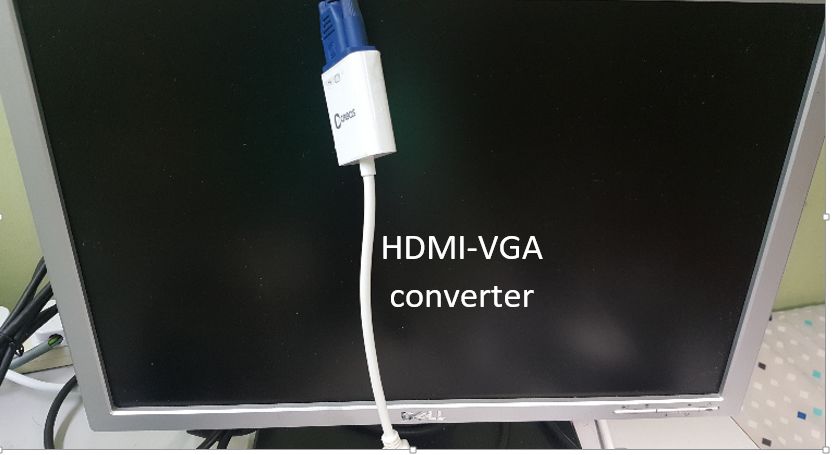
否則,需要進行網絡配置設置。因為此步驟是在您的筆記本電腦上啟用SSH Raspberry Pi,所以在此之前,您只能使用外部HDMI監視器和鍵盤登錄Raspberry Pi。僅限第一次連接設置(除非您不想在筆記本電腦上使用SSH,而是始終使用顯示器),將Raspberry Pi連接到HDMI顯示器或使用HDMI-VGA轉換器連接到VGA顯示器。
步驟46:6.2

通過連接microUSB充電線或者通過連接來啟動Raspberry Pi通過電源模塊將其連接到Li-Po電池。請注意,如果您使用的是鋰電池,請始終連接BB警報以監控電池電壓,以避免在電池電壓低于每個電池3 V時造成無法修復的損壞。
步驟47:6.3

然后,通過查看監視器屏幕,輸入默認用戶名和密碼登錄操作系統。默認用戶名為‘ pi’密碼是‘ raspberry’。密碼可能不會顯示,但無論如何都會輸入每個輸入的命令。
步驟48:6.4
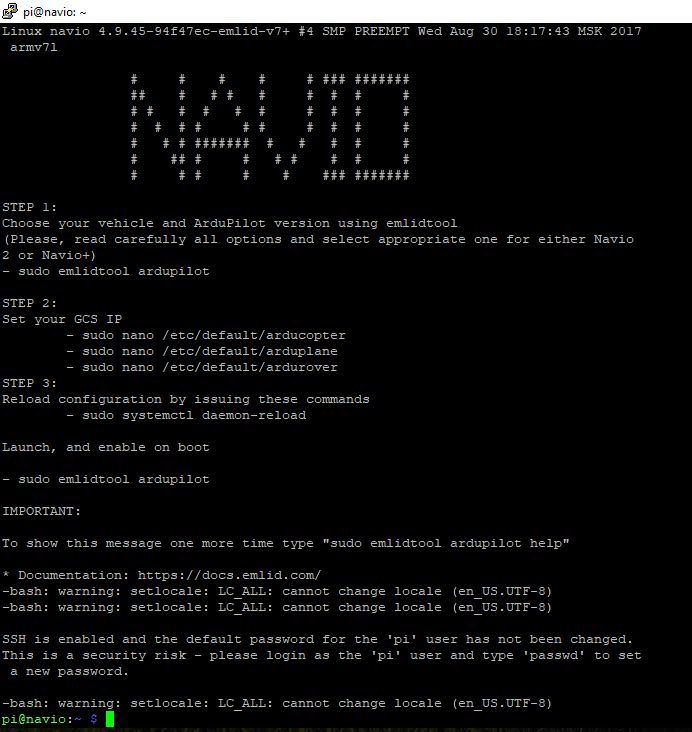
當您登錄操作系統時,您將看到如下頁面
步驟49:6.5
復制并粘貼命令:
sudo nano/boot/wpa_supplicant.conf
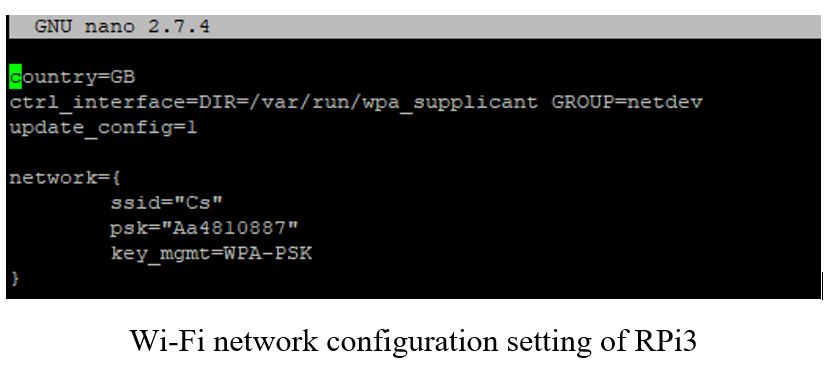
并按Enter鍵轉到該文件以配置Wi-Fi設置。輸入RPi3和筆記本電腦(帶PuTTY)連接的網絡的密碼和用戶名,如圖所示。在ssid行的“NETWORK NAME”和“psk line”的Wi-Fi網絡密碼之間填寫網絡名稱。如果您的本地網絡沒有密碼保護,請將psk的“”留空。這些只是您通常用于將設備連接到Wi-Fi的網絡名稱和密碼。要移動綠色文本插入光標,請使用箭頭鍵。
步驟50:6.6
之后,按“Ctrl + X”退出并按“Y”鍵,然后按“Enter”鍵保存您在網絡配置文件中編輯的內容。通過輸入命令sudo reboot重新啟動ardupilot。
如果您沒有顯示器或鍵盤,也可以通過編輯microSD卡中名為wpa_supplicant.conf的文本文件來完成整個編輯過程。要執行此操作,只需從Raspberry Pi中取出micro SD卡,將其插入筆記本電腦或PC,然后查找文本文件以編輯ssid和psk設置,就像使用顯示器編輯它一樣。這一次,右鍵單擊該文件并使用WordPad等合適的軟件打開。編輯后保存txt文件。
然后,如果您在監視器顯示屏上,請鍵入命令sudo reboot重新啟動Raspberry Pi。設備重啟后,您的Raspberry Pi將能夠在啟動時自動連接到您設置的Wi-Fi網絡(盡管連接可能需要一些時間)。在以下步驟中,SSH連接需要將Raspberry Pi和筆記本電腦連接到同一LAN(Wi-Fi或以太網)。
注意:使用移動或PC熱點也與使用普通Wi-Fi相同。您可以通過手機或計算機監控連接到網絡的設備。如果無法連接,您可以重新啟動RPi3或重新檢查您在文本文件中編輯的網絡配置名稱和密碼(請注意它們區分大小寫,如果實際上沒有,則不應有額外的間距),并等到它連接(導航和你的電腦)并顯示。
步驟51:7.0使用PuTTY在筆記本電腦上使用SSH Raspberry Pi
PuTTY是一種網絡終端仿真器軟件,可以使用您的筆記本電腦登錄Raspberry Pi。如果你不想用你的筆記本電腦SSH你的Raspberry Pi,這很好,但這需要你每次想要進行配置設置時將Raspberry Pi連接到顯示器和鍵盤,例如設置Ardupilot,或者設置GCS通信。如果是這種情況,您甚至不必執行Wi-Fi配置設置,也不需要任何互聯網連接。只需直接通過顯示器而不是通過PuTTY“設置Ardupilot”。
從下面的鏈接安裝PuTTY并按照所有安裝步驟操作。然后在您的PC上搜索PuTTY桌面應用程序并運行它。
步驟52:7.1
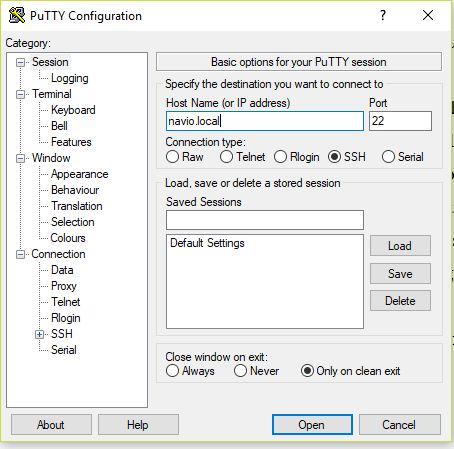
要連接PuTTY,請輸入配置“navio.local”作為IP地址,然后輸入(或驗證)默認端口22,如圖所示。重啟PuTTY并嘗試多次,如果它提示本地主機不存在的錯誤。如果情況仍然存在,請嘗試斷開對Raspberry Pi的供應,然后重新連接,即重新啟動Raspberry Pi。
步驟53:7.2
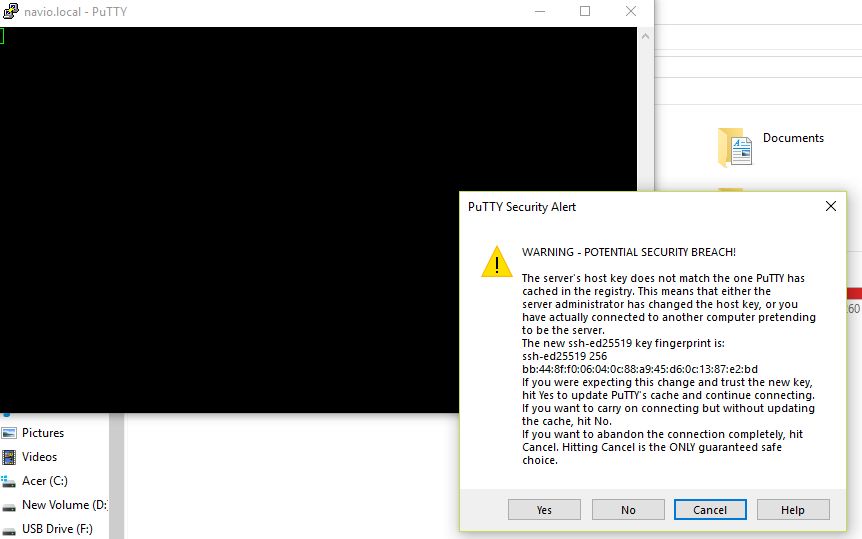
重復此操作,直到PuTTY啟動,并提示您輸入PuTTY的警告消息。點擊“是”允許連接。然后,在輸入默認的“pi”作為用戶名和“raspberry”作為密碼后,您將看到通過將Raspberry Pi直接連接到顯示器所找到的相同界面,但這次是您的筆記本電腦的SSH。/p》
如果“本地主機不存在”錯誤仍然存在,則表示您無法將筆記本電腦和Raspberry Pi連接到同一個工作網絡。嘗試使用移動熱點查看筆記本電腦和Raspberry Pi(設備的默認名稱是否為navio)是否在已連接設備列表中。如果沒有連接navio設備,請檢查您的網絡配置設置。
步驟54:7.3
整個設置步驟可參考官方導航文件:
https://docs.emlid.com/navio2/common/ardupilot/installation-and-running/
步驟55:8.0設置Ardupilot
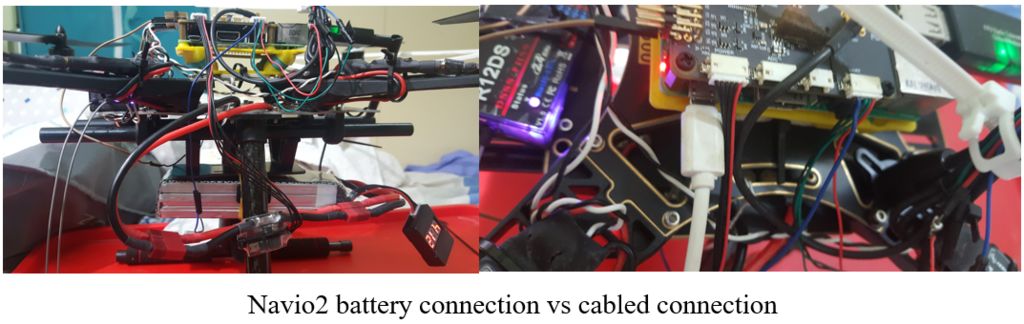
如果您通過電源模塊從Li-Po電池為Raspberry Pi供電ESC也會為您的ESC提供動力,ESC將持續發出嗶嗶聲,直到您完成校準硬件。如果您認為嗶嗶聲很煩人,請使用microUSB線纜為電路板供電。但是,在以下步驟中不建議這樣做,因為使用microUSB電纜會給校準過程增加物理上的困難。在飛行校準步驟中切換到電池連接可以解決問題。
步驟56:8.1
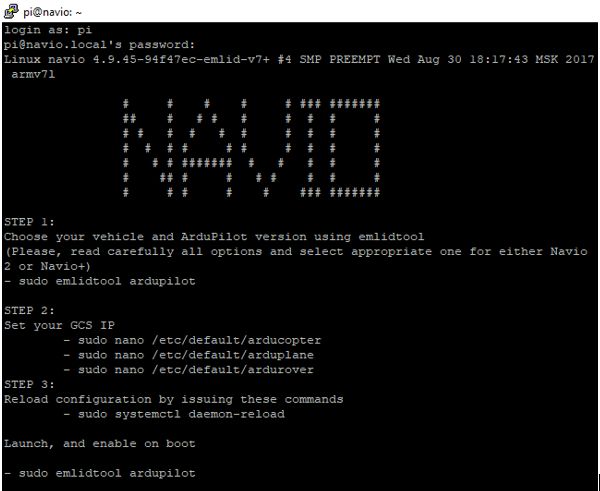
一旦連接建立后,輸入默認的‘pi’和‘raspberry’用戶名和密碼將提供相同的簡單界面,如下所示。如上所述,您可以通過筆記本電腦上的SSH(您必須將筆記本電腦和RPi連接到同一LAN)或直接通過顯示器連接到此界面。
步驟57:8.2

為了設置Ardupilot,必須通過命令選擇車輛類型,版本和電路板“ sudo emlidtool ardupilot“。
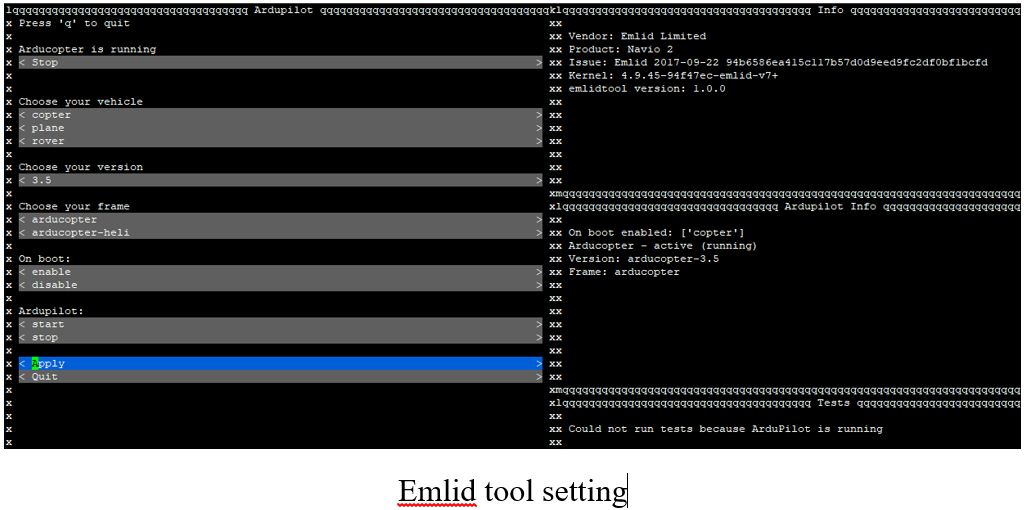
如果要復制和粘貼,請使用右鍵單擊(不是Ctrl-C和Ctrl-V),然后按Enter鍵運行命令。界面如下所示。通過選擇您的車輛類型 - 直升機,Ardupilot版本,框架 - Arducopter,您是否希望Ardupilot在啟動時啟動 - 啟用,啟動Arducopter并應用。
步驟58: 8.3


然后,點擊“q”退出。要檢查是否在啟動Raspberry Pi時啟動ardupilot,將輸入命令:“systemctl is-enabled arducopter”。
車輛設置的變化需要一個接一個地通過命令重新加載和重新啟動車輛:
sudo systemctl stop arducopter
sudo systemctl daemon-reload
sudo systemctl start arducopter
或者不太優選,
sudo reboot
直接重啟arducopter
步驟59:9.0連接到地面控制站(GCS)
地面控制站是您的筆記本電腦,配有Mission Planner等軟件,用于實時監控航班。
您可以將四軸飛行器與地面控制系統連接起來站(GCS)使用LAN連接(udp連接),就像設置SSH通信一樣。當您想要將無人機連接到GCS以執行簡單任務(例如飛行前檢查,飛行后分析或檢索飛行數據)時,Udp連接非常有用。但是,為了監控航班,建議使用遙測模塊對,因為它們更可靠(不依賴于網絡連接強度),并且更容易連接。
對于udp和遙測連接,GCS通信需要一次性配置設置。輸入命令以配置遙測網絡通信設置:
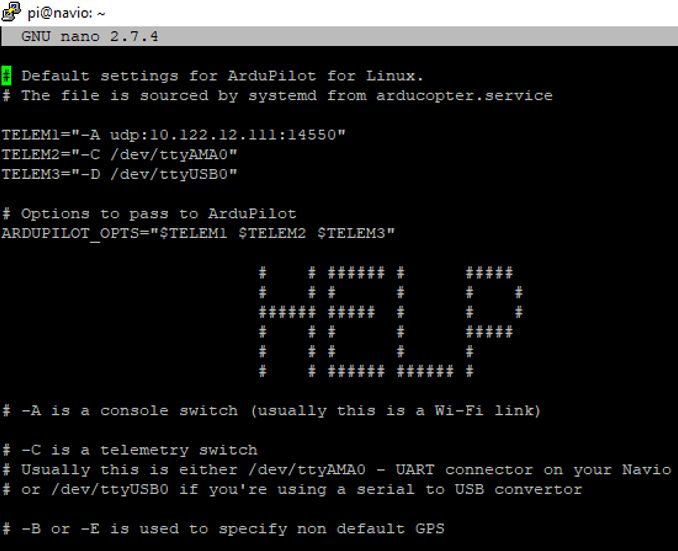
sudo nano/etc/default/arducopter
如果GCS將通過udp連接到Arducopter,即LAN連接,網絡的IP地址,然后是默認的udp波特率,輸入14550。
步驟60:9.1
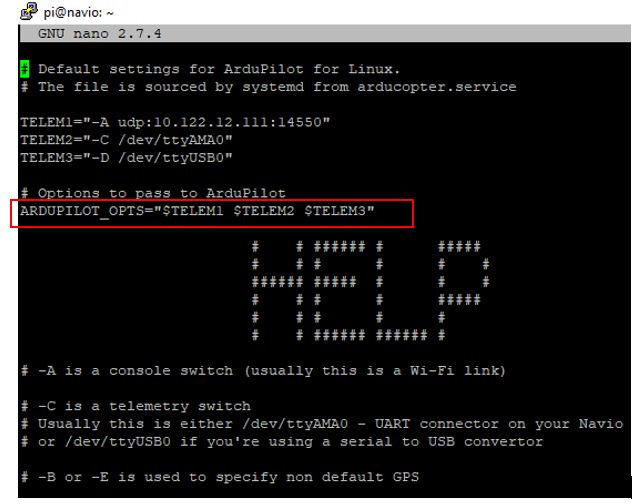
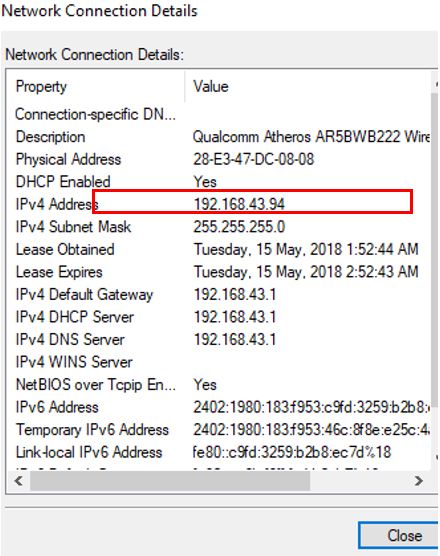
網絡IP地址為從圖中所示的網絡和共享中心獲得。以這種情況為例,我們將替換
TELEM1 =“ - A udp:10.122.12.111:14550”與
TELEM1 =“ - A udp:192.168.43.94:14550”
步驟61:9.2
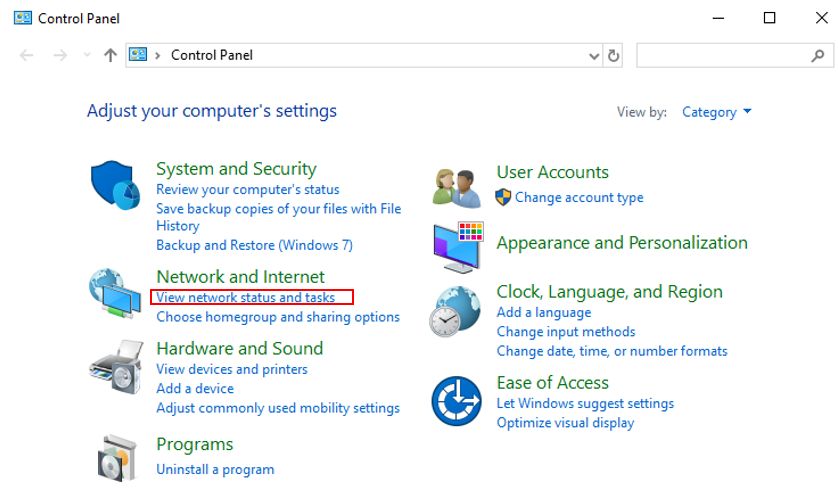
要打開網絡和共享中心的網絡連接詳細信息,請轉到控制面板并按“查看網絡狀態和任務“
步驟62:9.3
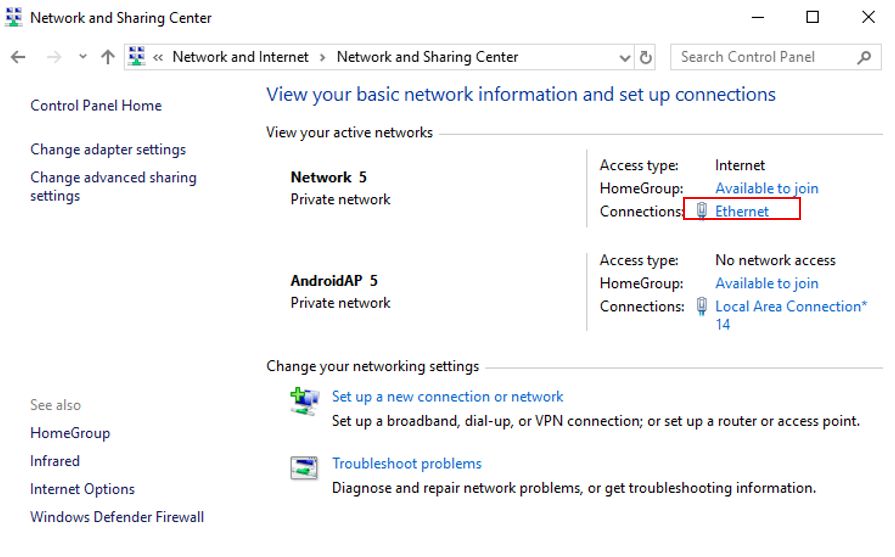
從網絡和共享中心,選擇常見的你已經連接了Raspberry Pi和筆記本電腦的局域網。網絡地址取自上面顯示的IPV4地址。
步驟63:9.4
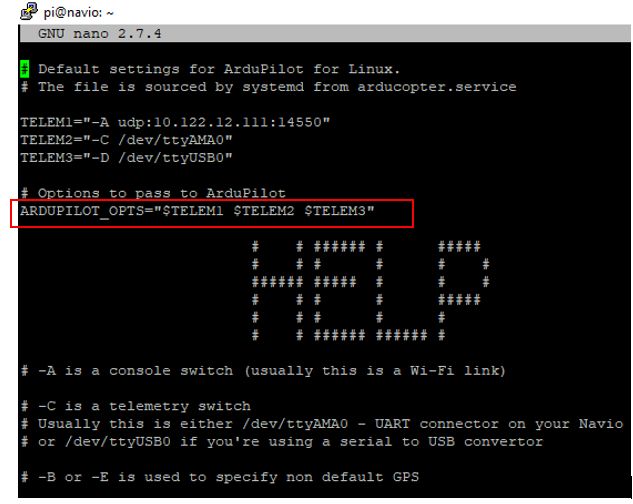
現在如果是GCS將通過一對遙測模塊連接,第二行“TELEM2”已更新。只需通過刪除行開頭的#符號取消注釋該行
TELEM2 =“ - C/dev/ttyAMA0”
如果USB遙測(通常是地面模塊)是使用時,添加了第三行‘TELEM3’。這次將“USB”中的“AMA”替換為
TELEM3 =“ - D/dev/ttyUSB0”
通過將所有輸入的“TELEM1”指定為“TELEM3”作為選項,可以建立上述任何類型的連接,而無需重新配置在此界面中。
步驟64:9.5
再次按ctrl-X離開,然后按‘Y’,然后按Enter鍵保存更改。然后,通過‘sudo reboot’重新啟動Raspberry Pi。
使用的GCS軟件是Michael Oborne的Mission Planner,它通過易于使用的界面支持各種功能。
步驟65:9.6
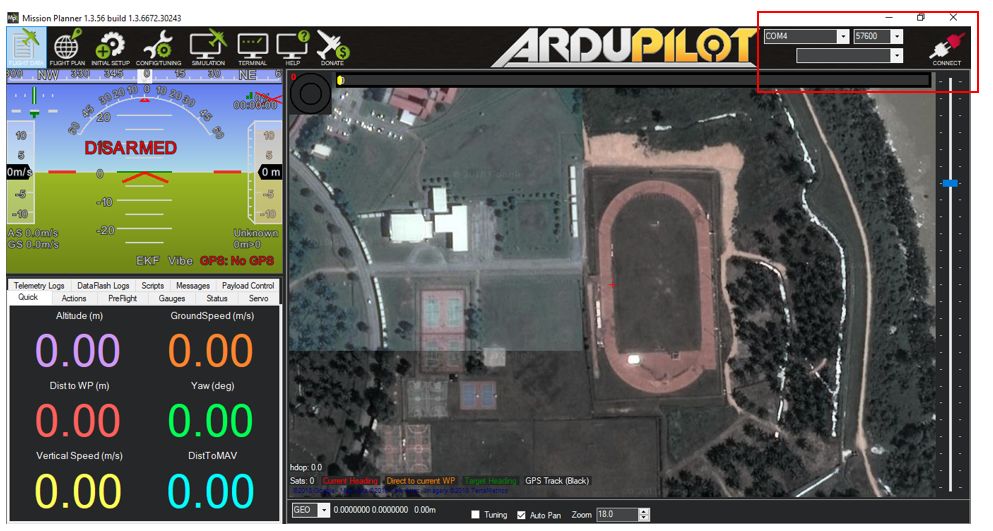
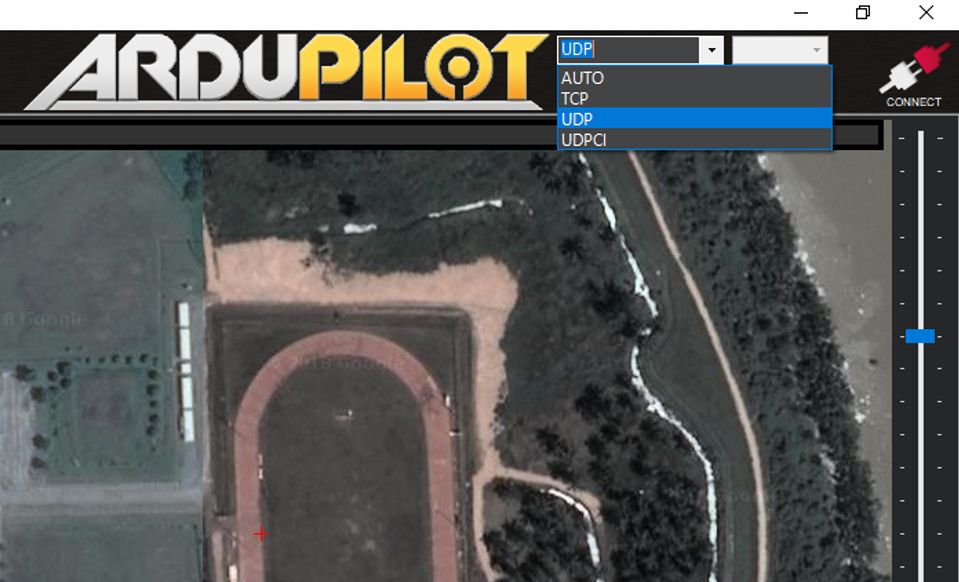
如果您使用通用LAN進行GCS-navio2通信,請選擇在右上角(在您編輯遙測網絡配置地址之后)UDP連接并點擊“連接”。波特率將自動顯示,參數將很快加載。任務計劃程序左下角的航班數據值的變化將表示連接成功。如果mavlink連接耗時太長 - 在30秒倒計時之后 - 考慮重啟Raspberry Pi,通過PuTTY上的sudo重啟,或直接拔掉并重新連接到Raspberry Pi的供應。請注意,如果您的網絡IP地址已更改但您尚未在上述步驟中更新遙測網絡配置,則它將永遠不會連接。查看網絡和共享中心的IPV4地址!
步驟66:9.7
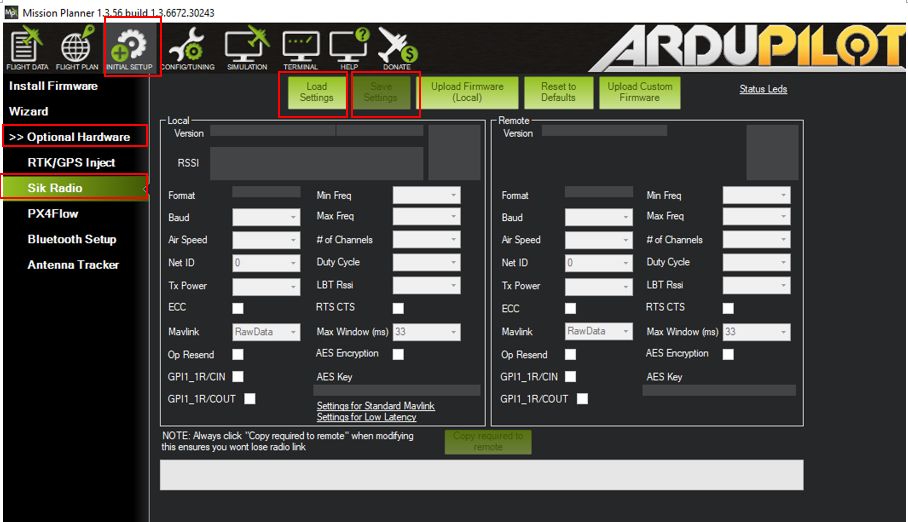
如果要連接使用遙測模塊對,將空氣模塊插入navio2上的UART端口,將地面模塊插入筆記本電腦,通過USB。等到兩個模塊上的LED指示燈停止閃爍(即發出穩定的燈光),然后轉到初始設置》可選硬件》 Mission Planner上的Sik Radio。為此,您不必在此之前建立udp或任何連接。然后,按“加載設置”按鈕并等待自動加載空白區域中的參數。處理完成后保存設置。然后轉到另一個選項卡,然后回來查看paramteres是否仍在那里。如果此操作失敗,請嘗試重新啟動RPi并嘗試多次。
請注意,所有硬件連接都顯示在“無人機硬件設置”部分中。
步驟67:9.8
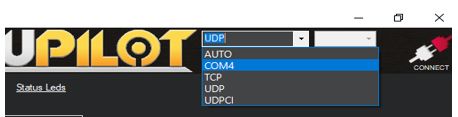

然后,將連接更改為COM4(波特率也將自動加載),然后點擊‘連接”。遙測連接通常需要更長的時間來加載參數,但也應該在幾秒鐘內顯示響應。再次,如果此步驟失敗,請在重新啟動RPi后重試。
步驟68:10.0任務計劃程序(MP)上的飛行校準
如果我們連接Raspberry Pi通過電池供電的電源,而不是micro-USB電纜,esc將連續發出蜂鳴聲,表示設置程序尚未完成,esc無法識別飛行控制器。只有在完成所有校準后,esc蜂鳴聲才會停止。
飛行校準是在四軸飛行器可以為飛行武裝之前完成的關鍵且必須的步驟。要繼續,我們首先將Mission Planner GCS連接到上一步的無人機,通過udp連接,或通過一對遙測模塊(推薦)。
沒有必要完成以下步驟:設置向導,旨在指導新用戶完成校準程序。校準步驟如下:
步驟69:10.1
1。轉到初始設置選項卡》強制硬件》幀類型
步驟70:10.2
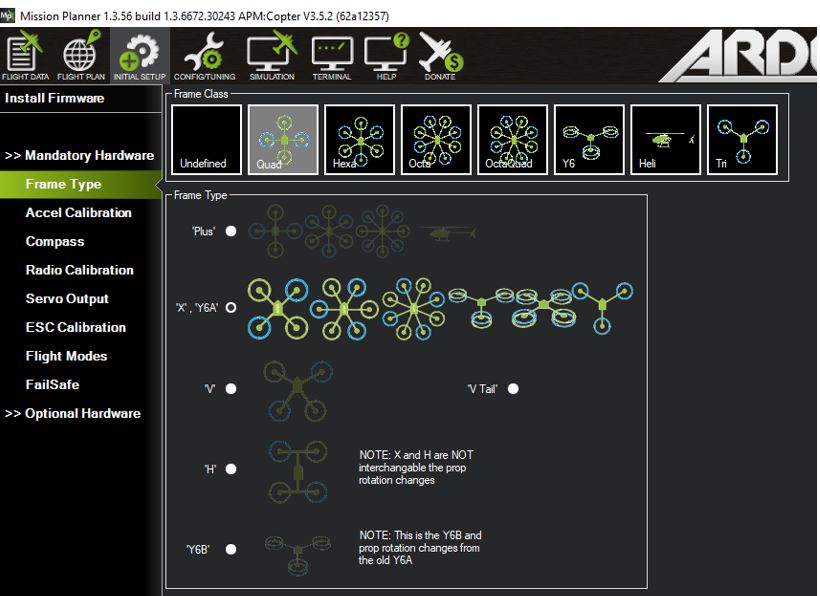
2。選擇四軸飛行器機身類型 - X-frame。
步驟71:10.3
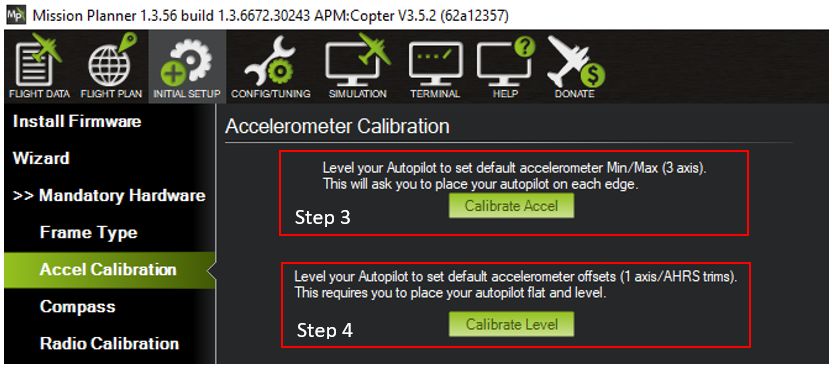
3。執行加速度計校準。只需將無人機放在平坦的水平上,然后點擊“Calibrate Accel”。
步驟72:10.4
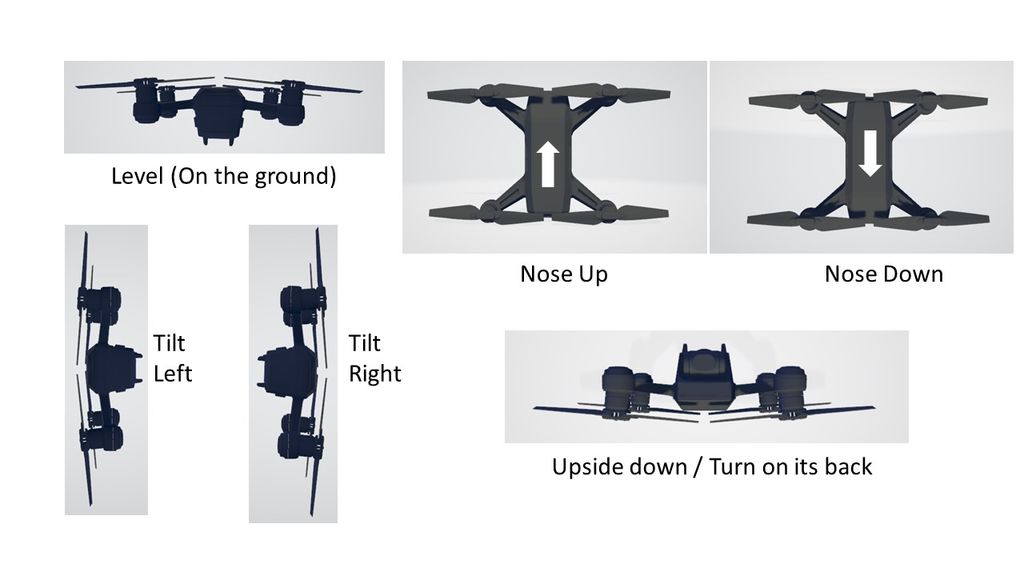
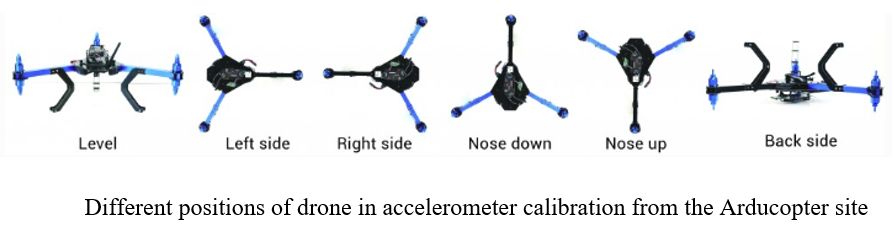

4。然后將四軸飛行器靜止放置在平坦表面上以進行水平校準。根據指示傾斜的不同方向:在水平,在其右側,在其左側,鼻子向上,鼻子向下和在其背部,被校準。正確調整每個位置后按下按鈕。如上所述,當您的RPi通過遙測無線連接到GCS并通過電池供電而不是使用LAN電纜或MicroUSB電纜供電時,此校準過程更加簡單,因為否則四軸飛行器的運動將受到限制電纜。
此步驟將四軸飛行器的當前狀態覆蓋為水平和不同位置,并且每次從姿態指示器(如上所示)看到四軸飛行器未正確調平時都可以完成。
注意:遙測連接需要通過初始設置選項卡中可選硬件中的Sik Radio連接進行一次性配置,方法是在空氣和接地模塊的LED處于綠色,固態發射狀態后加載設置。
步驟73:10.5
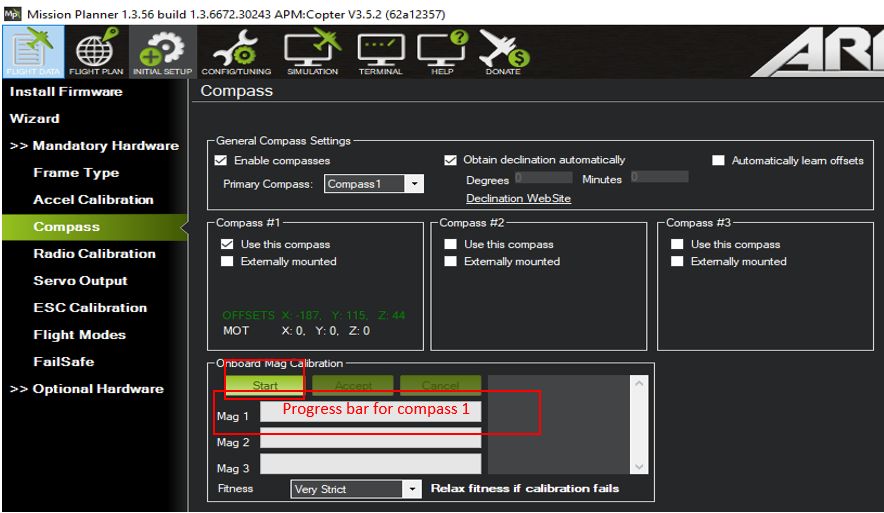
5。四軸飛行器標題的精度需要磁力計或羅盤校準,并通過移動四軸飛行器以覆蓋3軸平面的所有方向來執行。要開始此操作,只需按下開始按鈕,如下圖所示。校準將開始收集所需的傳感器數據,并且所選羅盤的校準進度顯示在綠色進度條中。
步驟74:10.5.1
要校準指南針,請將無人機的頂部朝向您,并將其移動到圓圈中,就像您駕駛汽車超過一個周期一樣。然后重復無人機頂部背離你的動作。然后,將無人機旋轉到其水平面上,然后再將其顛倒旋轉。 Ardupilot在磁力計校準上的視頻演示如下:https://youtu.be/DmsueBS0J3E
步驟75:10.5.2
最后,進度條應該已經到達結尾,并顯示一條消息告訴完成和將顯示快速重啟。
navio2飛行控制器中有2個內置指南針。如果使用指南針1和2(已選中)。它們都必須進行校準。如果任何指南針在校準時保持重新加載(綠色進度條在重復進行后再次重新開始),則取消選中有問題的指南針,即如果指南針2的進度不斷重新加載則僅使用指南針1,如果指南針1指示則使用指南針2進度保持重新加載。
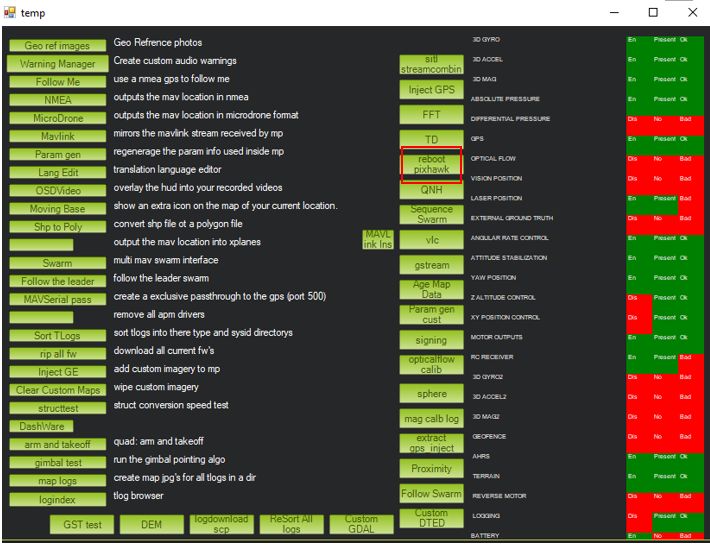
如果磁力計校準中出現問題,請不要使用設置向導。校準完成后,按Ctrl + F打開’temps‘并重新啟動pixhawk,如圖所示。
步驟76:10.5.3

重新啟動后,為了查看新校準的羅盤偏移值,單擊以轉到任何其他選項卡,然后返回羅盤校準選項卡。對于所有被認為成功的方向,偏移值優選小于150(值以綠色顯示)。如果值大于150(黃色或紅色),請重新校準。偏移值過高可能會導致四軸飛行器無法通過預臂檢查列表。
如果多次重新校準嘗試產生類似結果,并排除了周圍金屬物體的干擾,請取消選中羅盤所有校準完成后,如果由于“羅盤偏移太高”而限制布防四軸飛行器,則需要預臂檢查清單。這可以通過轉到配置選項卡》標準參數》單擊“查找”按鈕并搜索手臂檢查來完成。取消選中“全部”,然后單獨重新選擇除指南針以外的所有內容并寫入(保存)參數。有時,即使您重新檢查指南針作為預臂檢查要求的一部分,由于指南針偏移導致四軸飛行器失靈也會消失。
步驟77:10.6
6。進行無線電校準,讓飛行控制器(FC)知道每個無線電通道從發射器發送到接收器的PWM范圍,然后FC才能將其轉換為飛行控制動作。要開始校準,請點擊“Calibrate Radio”按鈕。然后,在所有方向上移動發射器上的左右桿,同時檢查每個桿是否響應右通道,如下所示。左搖桿控制偏航(左和右)和節流(上下),右搖桿控制滾動(左和右)和俯仰(上下)。將每根棍子帶到2個極端,以獲得記錄其PWM值的全部范圍。當棒被推到極端時,指定無線電PWM范圍的紅色標記將擴展到側面。如果棒子沒有像所討論的那樣響應正確的通道,則必須對發射器進行修改,但是發射器通常只允許修改前4個以外的通道,這些通道是固定的
a 。頻道1:滾動
b。頻道2:音高
c。第3頻道:節流
d。第4頻道:偏航
注意:請確保變送器車輛設置為直升機,而不是其他類型的車輛。
步驟78:10.6.1



如果任何無線電信道的響應方向被反轉,則通過發射機或任務規劃器上的設置反轉信道信號。例如,如果在按下右側支架時,無線電配置中的音高顯示為正,則可以反轉該無線電頻道。之后,所有可用的通道都通過將每個開關投向不同的方向來校準其無線電。
執行電機和ESC校準,以實現更好的功率傳輸和電機旋轉。
步驟79:10.7
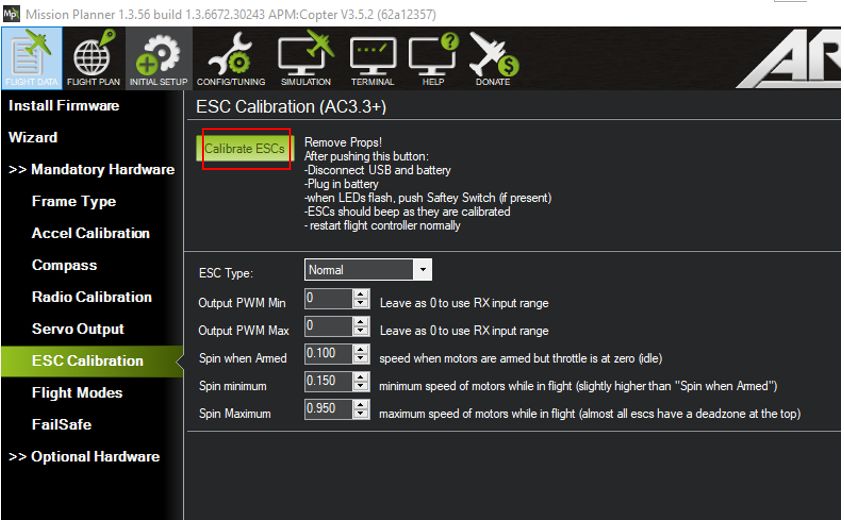
7。要執行ESC校準,請按校準ESC按鈕。將變送器油門桿(左)完全向上推,啟動飛行控制器。然后,過一會兒,拉下油門。長時間的嗶嗶聲停止后,ESC校準將完成。如果蜂鳴聲持續存在,請放棄校準并正常重啟您的四軸飛行器,并至少使用油門。每次首次連接電源時都會進行一些ESC校準,并且會發出長嗶聲,FC LED會以讀數和藍色閃爍。
校準后,嗶聲消失。如果不是,那么校準步驟可能不完整。按照所有向導進行操作,以確保涵蓋所有必需的校準和設置。還要檢查所選的幀類型是否正確。
步驟80:10.8
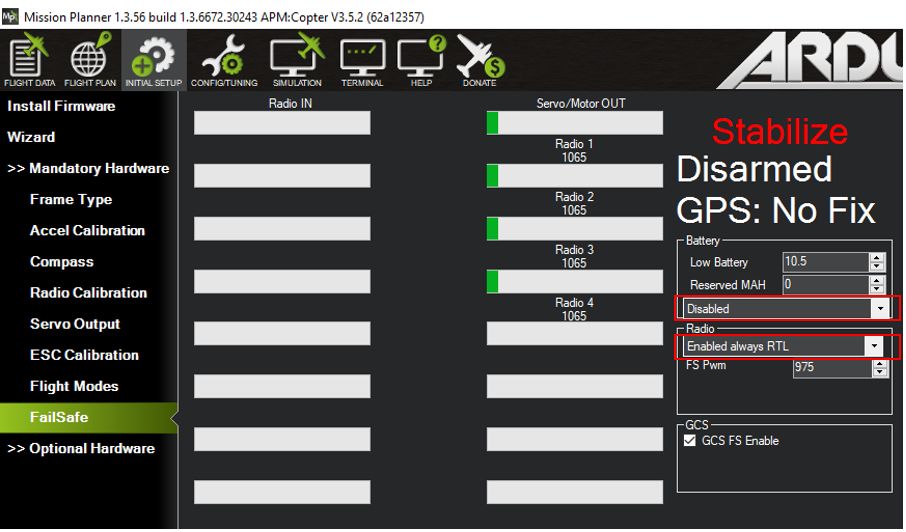
8.故障保護
建議將四軸飛行器的故障保護設置為在低電路板電壓下著陸(除非FC測量的電路板電壓不準確。使用BB警報器更方便,更方便.BB警報器連接到鋰電池電池,每當電池電壓觸發警報低于指定限制的電池電壓可以通過BB報警器上的簡單按鈕輕松設置觸發報警的電池電壓。可以安全地將其設置為3.2-3.4V,其中任何一個如果電池跌落到閾值以下,你將會驚慌地降落四軸飛行器。
無線電通信是一個至關重要的部件,它的失效會導致你的四軸飛行器永遠消失。不要使用可能干擾無線電的組件通道頻率并始終檢查變送器電壓和功能。通過設置無線電通信的故障保護來保護您的四軸飛行器每當無線電通信丟失時四軸飛行器將返回發射(RTL)的統一。
四軸飛行器只能在所有安全預臂檢查完成后布防,其中還包括以上所有內容飛行校準步驟。
步驟81:11.0更改任務計劃器中與無線電發射器通道相關的飛行模式
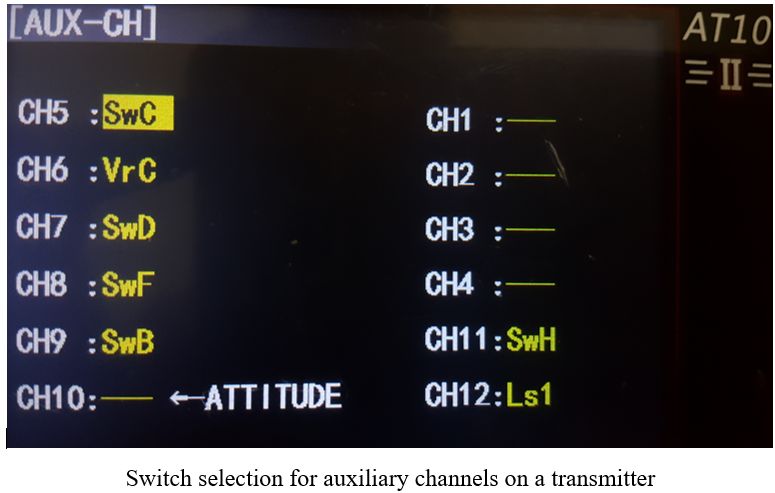
如上所述,主要通道(通道1至4)對于所選擇的特定類型的車輛是固定的。另一方面,輔助通道可根據我們的需要進行更改。不同的發射器具有不同的輔助信道設置方法。每個通道由變送器上的開關控制。我們需要做的就是將頻道的切換更改為我們想要用來控制特定頻道的特定開關。
步驟82:11.1
無線電發射器上的無線電頻道設置必須與任務規劃中的設置配合,您的四軸飛行器所持有的實際模式將如任務規劃器所示(不在您的無線電發射器中顯示)。
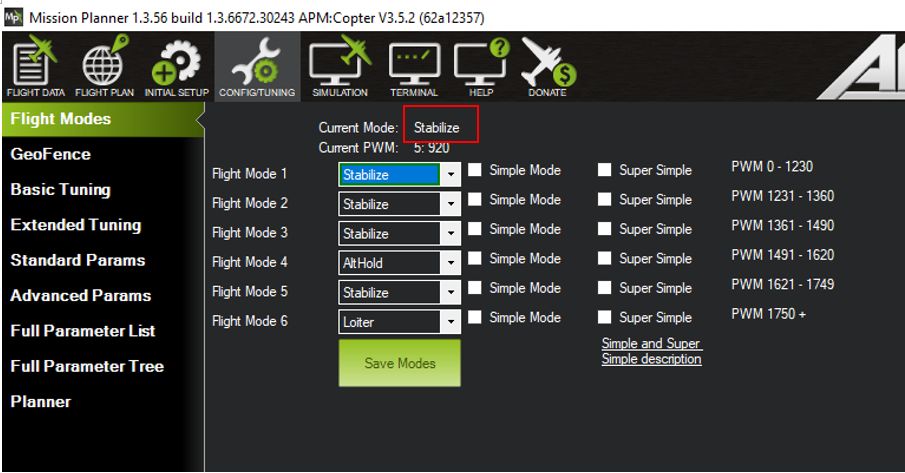
要轉到Mission Planner上的飛行模式設置,請將GCS連接到您的四軸飛行器(通過udp或遙測),然后轉到配置》飛行模式。 Mission Planner中的飛行模式設置使用收音機中的固定和默認頻道5。我們的目標是在5頻道的PWM范圍內,我們希望利用Mission Planner提供的6種飛行模式切換中的大多數。
因此,在您的無線電發射器上,更改輔助通道,通道5,由合適的3路開關控制(如果有的話)。將您的開關扔到不同的位置,以測試在不同位置使用的飛行模式。我在通道5的3向開關接合飛行模式1(當開關位置在底部時),飛行模式4(當開關位置是中間時)和飛行模式6(當開關位置在頂部時)。現在更改Mission Planner,從下拉列表中選擇我們希望四軸飛行器參與的模式,即在我的情況下,選擇飛行模式1,4和6的模式。
現在嘗試查看顯示的當前模式,以便在將開關拖到不同位置時查看更改。例如,在我的情況下,當前模式將從穩定(底部)變為高度保持(中間)和上升(上)。
如果您的無線電發射器僅具有雙向開關,請不要擔心。將2種飛行模式用于您認為對您最重要的模式。我建議Stabilize(基本的)和Altitude Hold(重要的是如果你不是專業控制油門)。
步驟83:11.2
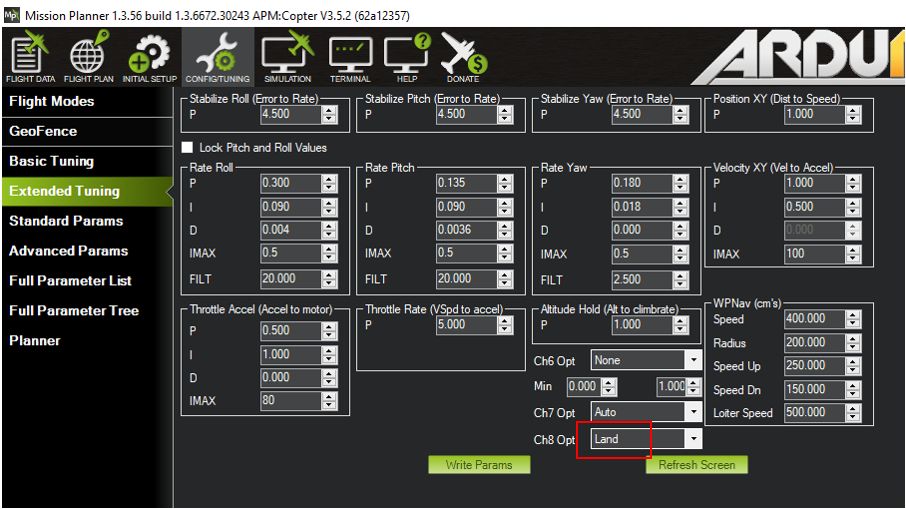
登陸四軸飛行器同樣具有挑戰性,您可能也希望包含它。我建議從單獨的通道設置Land模式,這樣你就可以將通道5單獨留給其他模式。只需轉到配置》擴展調整以獲取其他通道的模式設置
步驟84:11.3
再次,將您的無線電發射器上的設置與Mission Planner上的設置相匹配。例如,我們首先確保我們將通道8設置為我們想要用于降落四軸飛行器的開關(雙向),然后在任務計劃器上,我將通道8選擇為Land。土地將是優先于所有其他模式的優先模式。這意味著如果我的通道5設置為穩定(比如底部的開關C),并且我的通道8設置為著陸(比如開關F打開),則四軸飛行器將用于Land。請注意,四軸飛行器接合的實際模式顯示在配置》飛行模式中顯示的當前模式中。從那里,總是測試你設置的開關的不同切換,以查看四軸飛行器是否真正參與你想要的模式。如上圖所示,通道6和通道7還有2個通道,您可以使用這些通道進行其他所需的飛行模式。
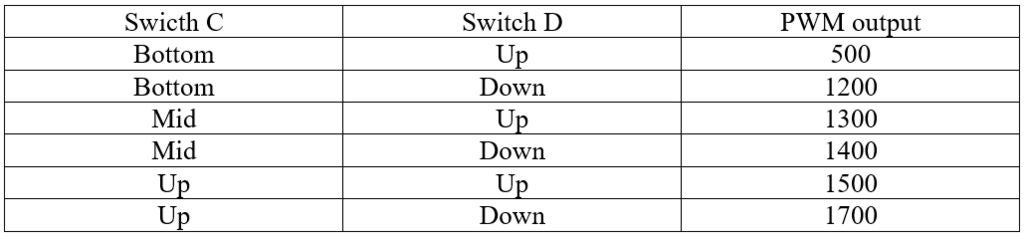
特定開關位置的通道PWM值如下所示飛行模式。不建議使用您自信的旋鈕,因為很難測量位置和精確的PWM輸出。
某些無線電發射器允許開關的邏輯控制來控制單個通道。這意味著可以使用2個開關來控制,例如通道5用于更多輸出。上面的示例僅用于更好的說明。此設置可以在邏輯開關下的無線電發射器(如果有此功能)上完成,對于每個發射器可能不同。花一些時間來了解如何執行設置。
步驟85:11.4

但是,它是不建議使用邏輯開關,除非您有信心,因為它可能很容易因切換的復雜性而引起混淆,并且在恐慌時可能很危險。為了安全起見,請始終使用單個3向開關,并在無線電發射器上制作清晰的標簽,以適應不同開關將要使用的不同模式。這有助于您能夠立即響應緊急情況,例如降落四軸飛行器或解除故障模式,而不必確定要控制哪個開關。
步驟86:11.5
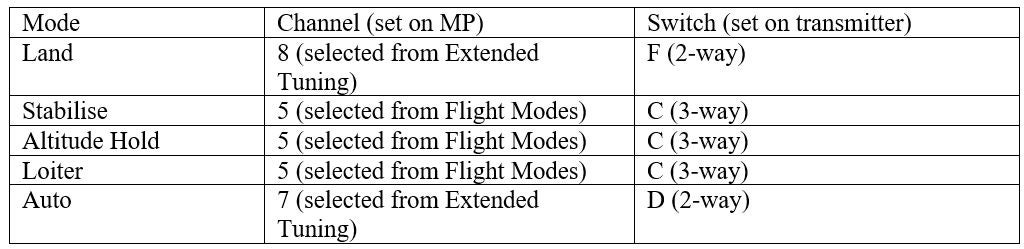
以上顯示我的開關設置摘要作為參考示例供您參考基于上面的MP(擴展調整)圖。您可以考慮設置的3種基本模式是Land,Stabilize和Altitude hold。
步驟87:11.6
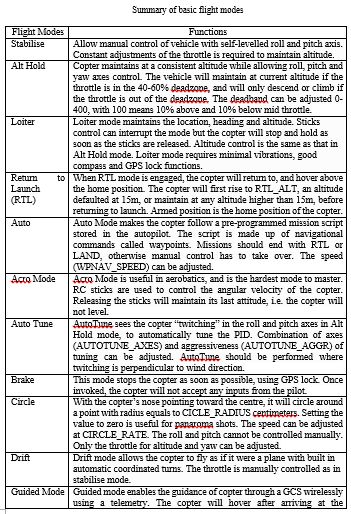
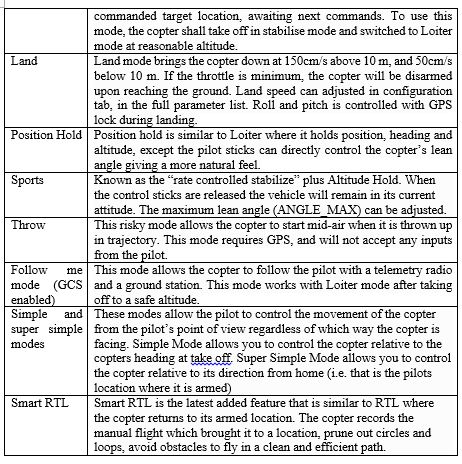
了解不同的重要飛行模式
在您的變送器和Mission Planner(連接到您的無人機)上設置飛行模式后,您將不再需要連接到MP了除非您想監控航班,否則啟動航班。但是,請確保您沒有切換到的模式!
步驟88:12.0安裝關閉開關到RPi3
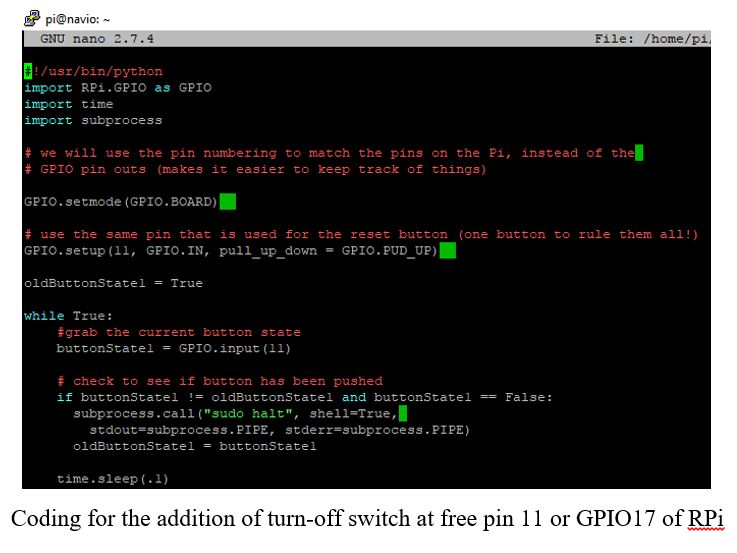
要關閉Arducopter,需要sudo halt命令。與PC類似,從長遠來看,沒有正確關閉設備可能會破壞存儲。因此,安裝了一個開關,并且在RPi啟動時正在執行用于關閉設備的開關操作的程序。硬件組件設置部分正在討論交換機安裝細節。
Raspberry Pi一旦從電池接收電源就開始啟動。但是,在適當地關閉它時會有一些麻煩。
我們都知道,Raspberry Pi微型計算機的適當關閉與正確關閉PC一樣重要。關閉只能在登錄Raspberry Pi后執行,可以通過鍵盤或鼠標和顯示器的正確連接,也可以通過PuTTY安全地連接到筆記本電腦(SSH)。通過拔出電源強制關閉可能會導致SD卡長期損壞。
因此,使用Raspberry Pi的一個免費GPIO - Navio2 Flight控制器沒有使用它 - 為Raspberry Pi安裝一個關閉開關。只能使用3個免費GPIO,即GPIO 17(引腳11),GPIO18(引腳12)和GPIO 26(引腳37)。想法是編寫一個在Raspberry Pi中啟動時運行的程序,例如,每當GPIO 17(引腳11)短路到地面時(通過瞬時按鈕開關),Raspberry Pi將運行命令自動關閉。
要向Raspberry Pi添加關閉按鈕,只需按照以下鏈接中的 ETA Prime 進行操作即可。這對每個人來說都非常簡單易行。
可以使用記事本或寫字板打開RetroPie文本文件的內容,并逐個復制文本文件中的命令,進入pi @ navio命令界面,如下圖所示
步驟89:13.0運行自治任務

請如果這是您第一次布置四軸飛行器,請先參考手動飛行。
要測試,首先要找到一個寬闊且空洞的空地,幾乎沒有障礙物或樹木。隨身攜帶您的筆記本電腦(Mission Planner),您的無人機以及所有必要的設備(如發射器,備用螺旋槳,扳手,如果需要可以擰緊電機蓋,如果需要還可以使用電纜扎帶等)到空地。將遙測地面和空氣模塊分別連接到筆記本電腦和飛行控制器。確保遙測連接已按“連接到地面控制站”部分進行配置,在地面和空氣模塊具有相同的實心LED指示燈(不閃爍)后,按右上角的“連接”。
在Mission Planner上,轉到“飛行模式”選項卡。使用鼠標可以更輕松地瀏覽地圖。鼠標滾輪可用于放大和縮小地圖,然后使用左鍵單擊拖動地圖以交互方式導航到任何方向。彈出對話框將詢問您是否要將無人機的當前坐標設置為Home位置(無人機起飛的點)。按’是‘即可。這樣,地圖上的四軸飛行器圖標(您的無人機位置)將與地圖上的“H”圖標(家庭位置)合并。
將GPS天線正確連接到飛行控制器上的MCX接口(請參閱組件設置),Google地圖將自動加載無人機當前所在的地圖。請注意,主頁按鈕(“H”圖標)作為當前無人機的位置(四軸飛行器圖標)加載,即“H”圖標必須與四軸飛行器圖標重合。否則,按上面的“家庭位置”進行操作。
步驟90:13.1

接下來,在地圖上,通過單擊您希望無人機跟蹤的點(WP)執行路徑規劃或任務規劃,如下所示,一個WP接一個。
步驟91:13.2

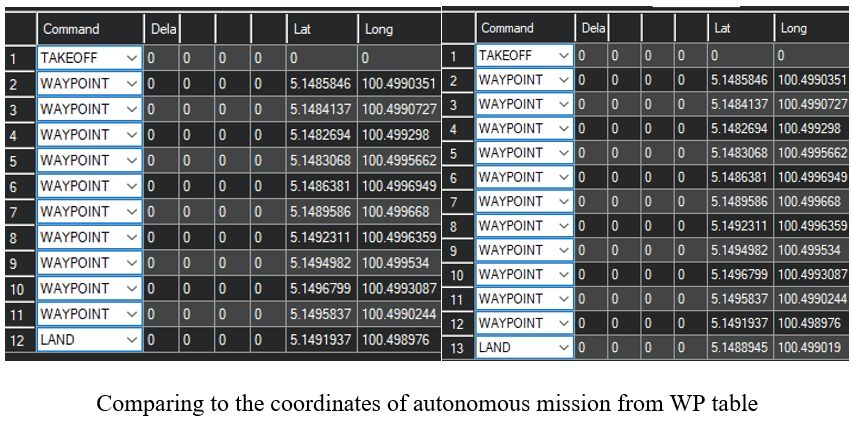
在路徑規劃期間,會自動生成WayPoint表。 WP表包含每個選定WP的位置坐標以及我們希望無人機在特定WP上執行的命令。將光標移動到地圖和表格之間的行,然后向下拉以放大相對于表格的地圖。
步驟92:13.3
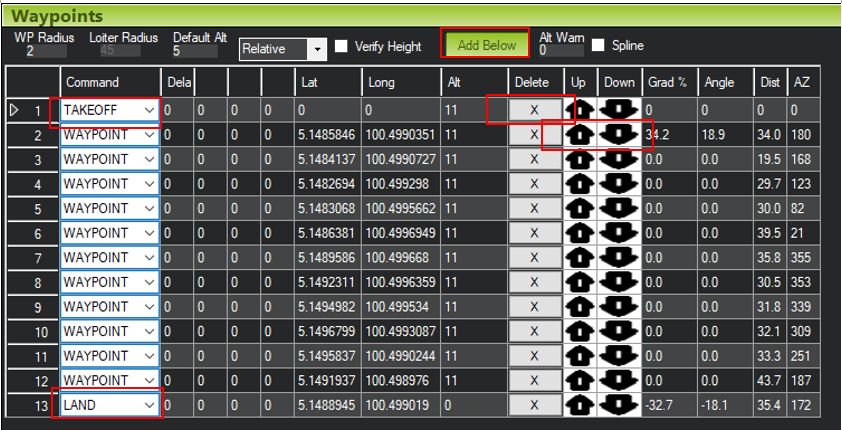
要使無人機執行完整的任務,請在第一個WP上方添加WP,并將新的第一個WP的命令更改為“TakeOff”。要添加WP,請單擊下面要按順序插入WP的行,然后按“添加到下面”。 WP將添加到行下方,并按向上或向下箭頭以交換WP的序列。將’TakeOff‘WP移到頂部。然后,在最后一個WP下面添加另一個新WP,并將新的最后一個WP命令設置為“Land”。 WP表的一個示例如上所示。
要刪除WP,請單擊“X”,整個行將被刪除。
步驟93:13.4

確保您的無人機不會碰到任何物體,如樹木,柱子等靠近計劃的路徑,避免完全靠近他們的任何WP。將所需高度設置為合適的值。建議自主飛行的離地間隙至少為5米。將它設置得更高,以克服樹木,燈柱和其他物體。還要確保飛行路徑已完成,并且沒有WP超出區域。在這方面要非常小心,因為有時候不希望的WP會出現在中間,并且會通過延伸到其他位置的黃線顯示,確保在執行任何操作之前刪除錯誤的WP。
步驟94:13.5
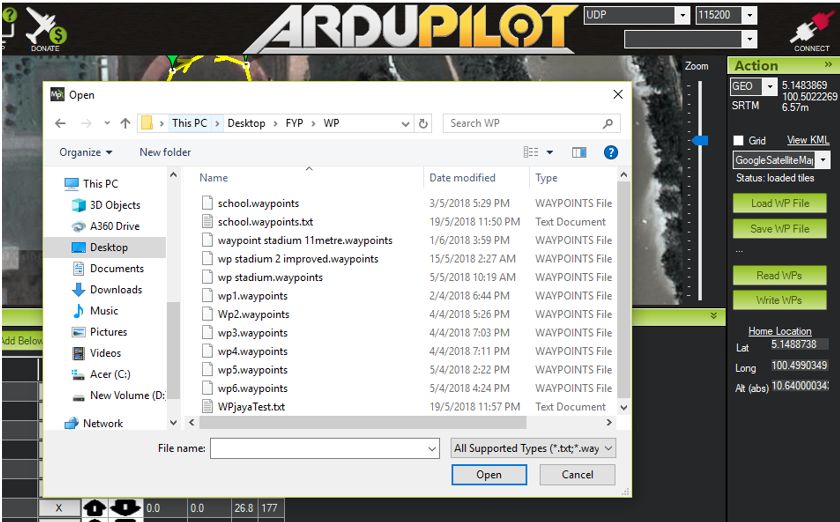
在如上所示的操作面板上,有4個重要的操作,即保存,加載,讀取和寫入。任務計劃程序上生成的任何WP表都可以作為文本文件(WP文件)保存到PC中,以便在您希望運行相同任務時將其加載到任務計劃程序。要加載已保存的WP文件,請按“加載”按鈕并指向保存WP文件的位置并將其打開。 WP表將加載到您的Mission Planner。仔細檢查加載的任務是否真的是您打算運行的任務。然后,按“寫入”按鈕將WP表保存在Mission Planner上。之后,按“讀取”將WP文件發送到飛行控制器,以便無人機將跟蹤路徑。這要求無人機通過遙測模塊與GCS連接。在“讀取”之后,任務計劃程序將再次詢問您是否要將“主頁”位置(“發射位置”)設置為當前加載的無人機坐標。按“否”以維護WP文件。多次執行讀取以確保無人機被告知該做什么。
步驟95:13.6
當“讀取”完成后,將左側油門桿(零油門)完全向右推并按住,將無人機穿過發射器。您的無人機現在應按照提到的方式放置,以便加載的坐標與歸屬位置一致(如果它們位于地圖上的不同位置,請按“歸屬位置”按鈕執行此操作)。你的無人機不會在自主模式或陸地模式下武裝。在你武裝之前先切換到穩定模式。有關不同飛行模式之間切換的詳細信息,請參閱“更改任務計劃程序中的飛行模式”部分。在無人機布防后,立即進入自主模式,然后輕輕推動油門以啟動自動模式。無人機將自動起飛到選定的高度,然后開始移動到第一個和后續的WP。
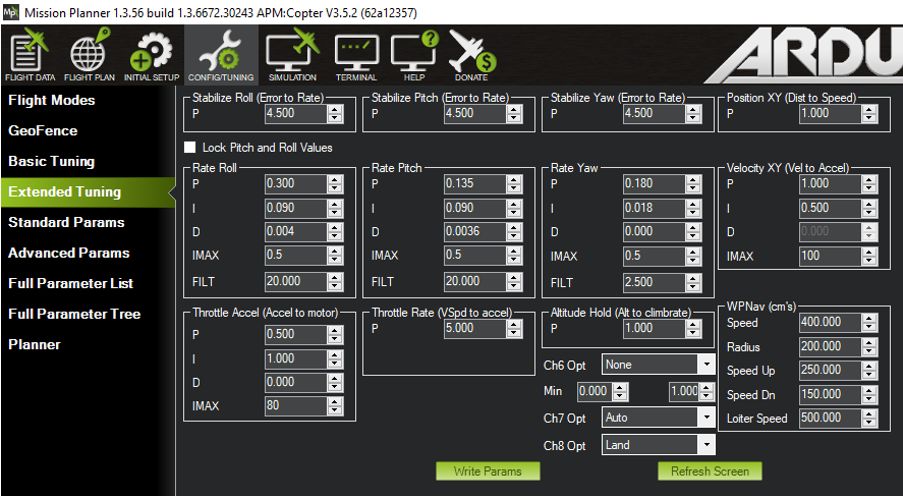
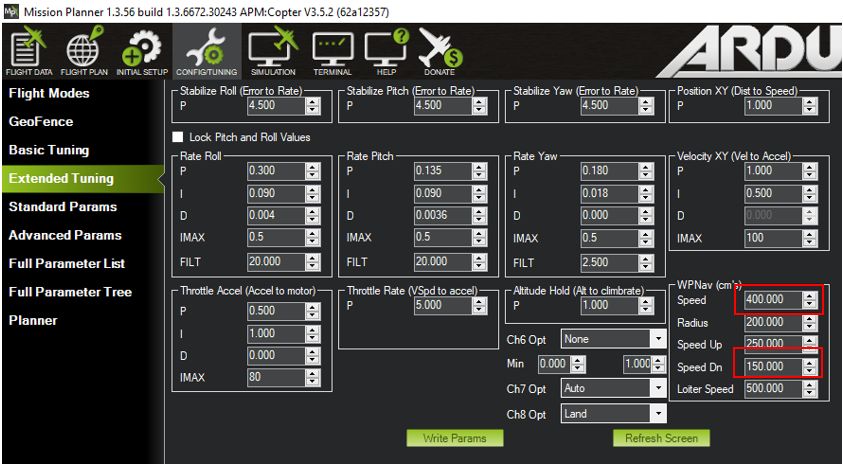
無人機飛過WP的速度可以通過搜索完整參數列表進行設置和編輯WPNAV_SPEED參數。在配置選項卡》擴展調整上更容易完成,如下所示。速度400.000表示您的無人機設置為以每秒4米的速度水平移動。如果您對GPS精度沒有信心,請將速度設置為小于每秒3米。
著陸速度同樣重要。通過搜索和編輯LAND_SPEED參數,可以在完整參數列表中設置陸地速度。當無人機即將接觸地面時,著陸速度是垂直最終著陸速度。該值最好設置為低至10 cm/s。無人機的垂直下降速度(最終觸地之前)是從完整參數列表中的WPNAV_SPEED_DN設置的。如果您沒有信心,或者您有氣壓計感應誤差,請將下降速度設置為低至10 cm/s。同樣,在擴展調諧選項卡上可以更容易設置,其中下圖所示的“速度Dn”意味著四軸飛行器將以1.5米/秒的速度下降,然后在設置的LAND_SPEED下降至最終的降落速度。請記住點擊“寫入參數”按鈕以保存任何更改。
步驟96:13.7

在中途飛行中脫離自主模式可能具有挑戰性。如果你是新手,沒有經驗,你不會想要這樣做。但是,如果在飛行途中發生錯誤,例如無人機移動速度太慢,或者您發現自己選擇了可能擊中物體的WP,或者您沒有將無人機設置為最后一個WP或合適的地點等。不要切換到陸地模式,因為無人機可能從天而降!在切換到穩定模式之前,將油門推到油門中間水平以上。準備控制油門,以防止它從天空中直線下降。在降落無人機之前將它飛到安全地帶。如果您已經在變送器上預先設置了Loiter模式,讓它從自動模式恢復控制,則在Loiter模式下更容易控制,因為它包括Altitude Hold。
路徑規劃完成后,你的無人機將在最后一個WP降落,一旦接觸地面,油門就會自動關閉。如果沒有,請完全拉下油門并啟動穩定模式,然后手動撤防無人機。在節氣門零位置將油門桿完全推到左側,解除無人機的武裝。
步驟97:14.0手動飛行控制

確保您已完成前面步驟中的所有校準和設置。確保您已在變送器和Mission Planner上設置了所有基本所需模式,例如Stablise,Altitude Hold和Land。有關更多詳細信息,請參閱“更改任務計劃器中關于無線電發射器通道的飛行模式”。
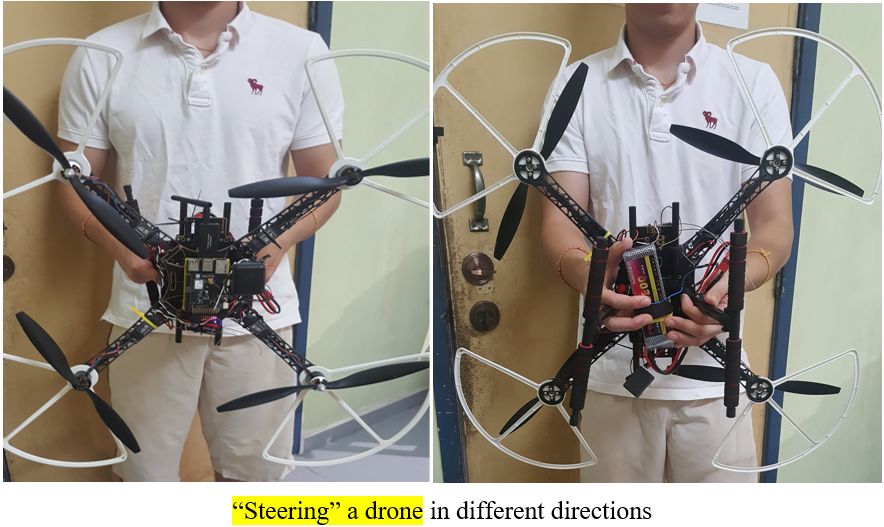
將四軸飛行器放置在寬闊的空地上的平坦地面上,然后插入電池。等到長長的嗶嗶聲停止。然后通過將油門桿完全向右推到零節氣門位置來操縱四軸飛行器。如果這是您第一次操縱四軸飛行器,您將確保電機旋轉方向正確。將螺旋槳關閉,然后用手指感覺每個電機的旋轉方向是否正確。否則,在特定的ESC和電機之間互換任何2個連接(子彈連接器)。請參閱“無人機硬件設置”部分中的電機設置。
步驟98:14.1
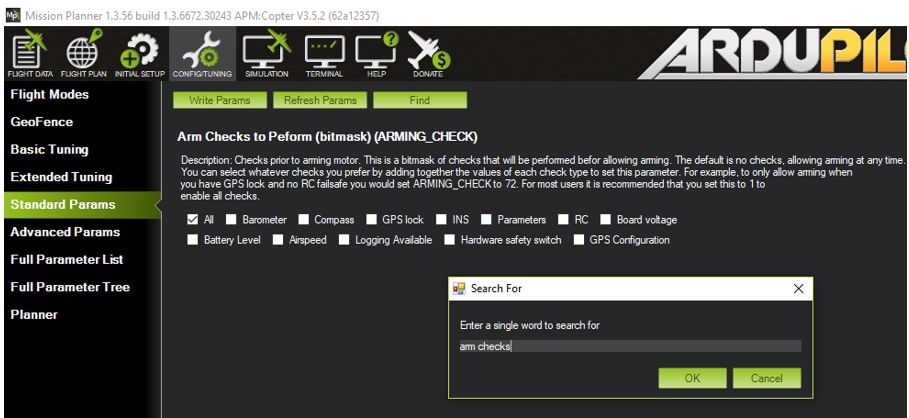
如果你的四軸飛行器無法武裝,將您的無人機連接到任務計劃器,以查看導致預臂檢查觸發的原因。例如,如果羅盤偏移太高,則需要重新校準磁力計。谷歌搜索預臂檢查錯誤消息,然后是關鍵字“Ardupilot”(例如:指南針偏移太高Ardupilot),以尋找解決錯誤的方法。
通過進入配置選項卡》標準參數》單擊‘查找’可以選擇性地禁用預臂檢查’ s組件。按鈕并搜索手臂檢查。取消選中‘全部’然后單獨重新選擇除故障組件之外的所有組件,然后按‘寫參數’保存。確保在確保故障組件不會導致崩潰后執行此操作。
步驟99:14.2

在你的四軸飛行器裝備后,即電機以最低速度旋轉時,輕輕地向上推動油門,直到看到你的無人機開始升起,給予更大的推力以幫助它升起并升空。在您想要的高度,切換到海拔高度保持高度。如果您希望無人機在保持相同高度的同時保持當前GPS位置,請切換到Loiter模式。當你切換到這些模式時,你的無人機應該保持在最后的高度。如果它下降或下降,你仍然可以向上推油門以控制飛行。
如果你不想使用高度保持模式,請確保你有信心通過不斷推動高度來控制高度。油門下降時油門向上,當油門上升時油門向下推,同時控制四軸飛行器的俯仰,滾轉和偏航。建議您在駕駛自建無人機之前先用更便宜的中國無人機測試您的飛行員技能(無海拔高度保持)。有些無人機具有內置的高度保持能力,學習這些無人機無助于掌握手動控制無人機高度的技能。
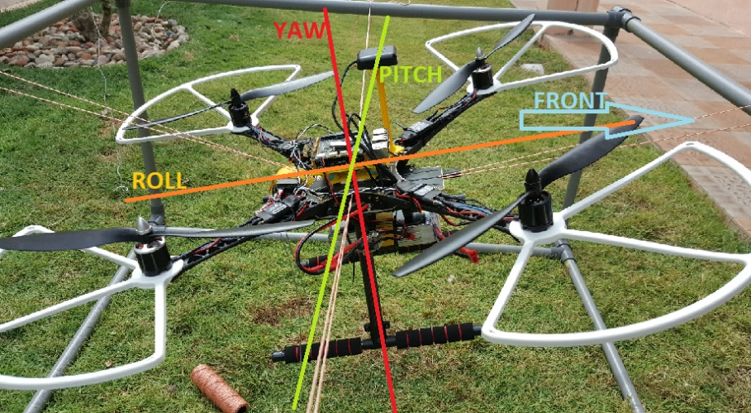
你的無人機可以開始水平移動你的無人機在空中有適當的離地間隙。你的無人機繞三軸旋轉移動:
1。向左滾動并向右滾動(請參閱變送器控制圖)
2。向下俯仰,向上俯仰
3。偏向左(逆時針)并向右偏航(順時針)
步驟100:14.3
確保始終監控電池電壓使用BB警報電池電壓監視器。警報觸發后立即降落四軸飛行器。垂直著陸速度可以與下降速度一起調整,如“運行自主任務”部分所示。如果您不想使用陸地模式,請通過上下控制油門桿慢慢將四軸飛行器下降到地面。這又需要很多練習來掌握完美的著陸。一定要先試試更便宜的無人機。
一旦你的四軸飛行器接觸地面,油門就會自動關閉。如果沒有,請完全拉下油門并啟動穩定模式,然后手動撤防無人機。在油門零位置將油門桿完全推到左側,解除無人機的武裝。
步驟101:15.0數據閃存日志分析
飛行后分析告訴您有關您的航班的所有信息,包括晴雨表高度,GPS位置,衛星接收,電池電壓,姿態響應,所需姿態,無線電通信,速度,電機電流,以及飛行路徑的3D圖像和模式。
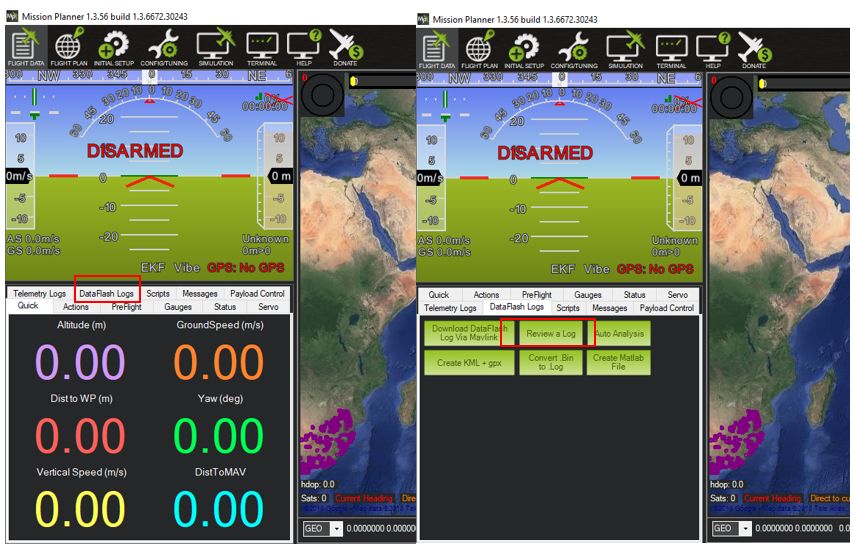
要從Mission Planner加載數據閃存日志,您不應通過無線電遙測將Mission Planner連接到無人機。相反,您需要通過將兩者(RPi3和您的筆記本電腦)連接到同一LAN來建立udp連接,并執行必要的遙測網絡配置,如“連接到地面控制站”部分所示。
Next ,按下如上所示的數據閃存日志選項卡》通過Mavlink下載DataFlash日志》,然后選擇要分析的航班日志文件(基于準確的時間和日期)》下載所選文件。下載的日志文件將存儲在您的PC中。
步驟102:15.1
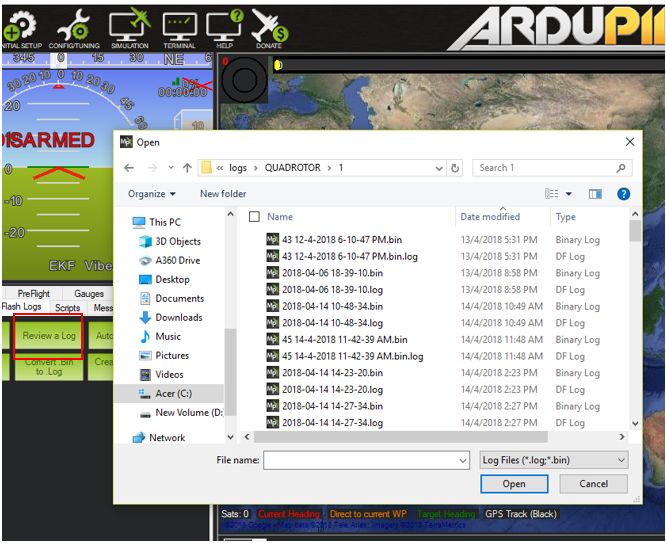
下載的二進制日志文件可以加載到Mission Planner進行分析,而無需連接到無人機。只需按“查看日志”,然后打開即可根據記錄的時間和日期加載所需的航班數據。
當您想查看閃存日志時,將自動定向到閃存日志的存儲位置。否則,可以在
C:\ Users \ Username \ Mission Planner \ logs \ QUADROTOR \ 1
中找到它們。
步驟103:15.2
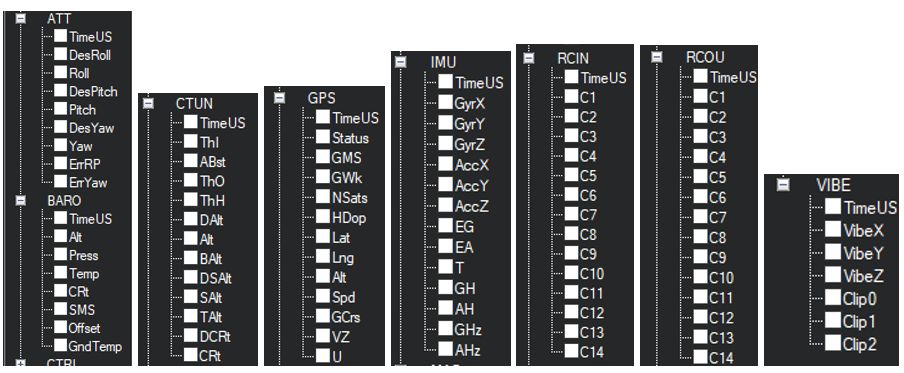
雙擊選定的二進制日志文件以打開閃存日志。從閃存日志中,數據閃存日志中的一些常用且有用的參數包括:
1。態度
一個。所需的滾動/俯仰/偏航:您從無線電中獲得的預期姿態或偏航值
b。側傾/俯仰/偏航:通過車載傳感器測量的實際姿態和偏航響應
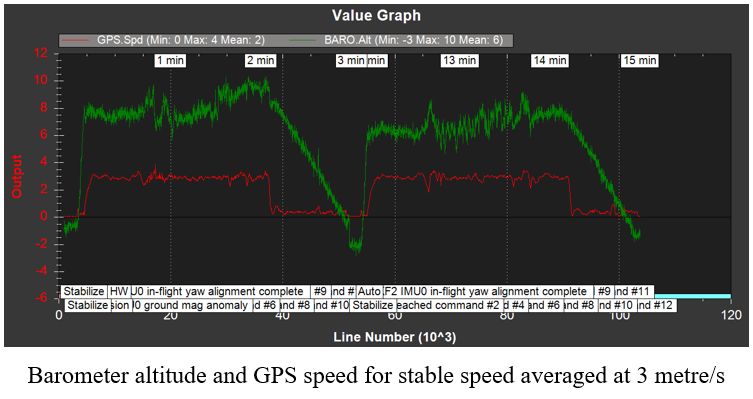
2。 BARO
一個。 Alt:晴雨表高度感應
3。 ThO:輸出油門值
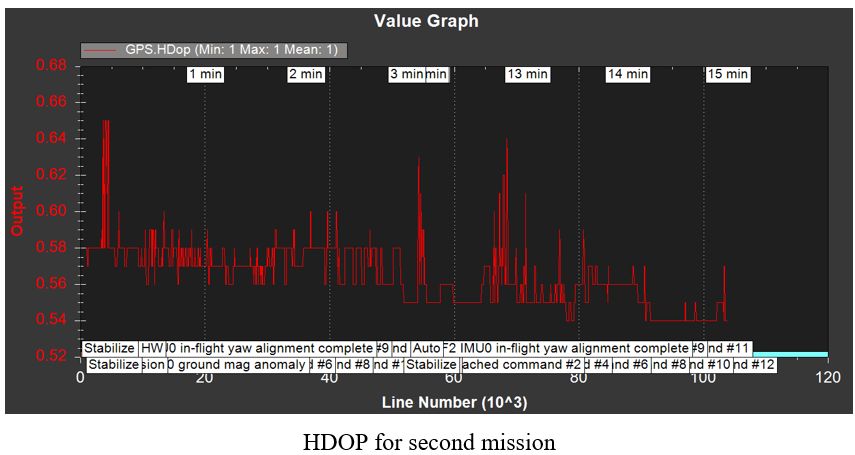
4。 GPS
一個。 NSats:衛星接收次數
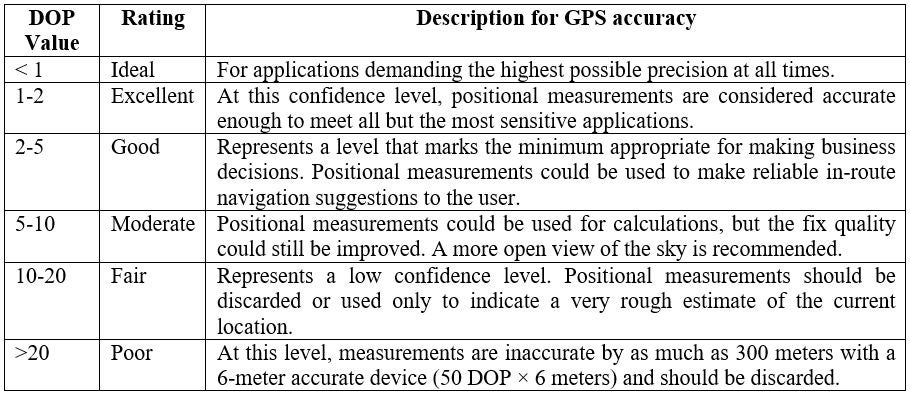
b。 HDOP:精確度的水平稀釋以告知GPS精度
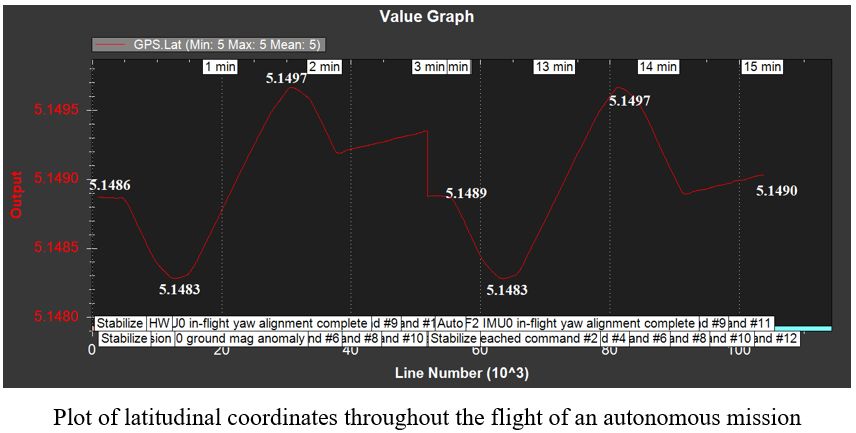
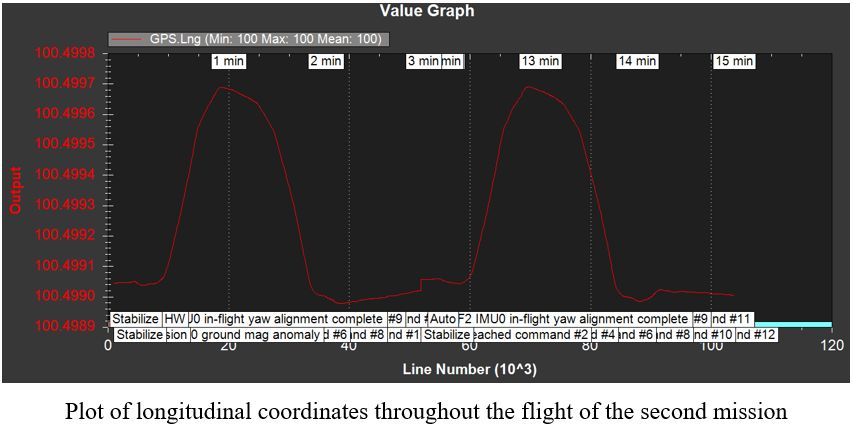
℃。 Lat:整個飛行過程中的緯度坐標
d。 Lng:整個飛行過程中的縱向坐標
e。 Alt:GPS測量的高度
f。 Spd:速度
g。 GCrs:地面課程(四軸飛行器的標題)
5。 IMU
一個。 Gyr X/Y/Z:陀螺儀IMU數據
b。 Acc X/Y/Z:加速度計IMU數據
6。 RCIN:輸入無線電信道值
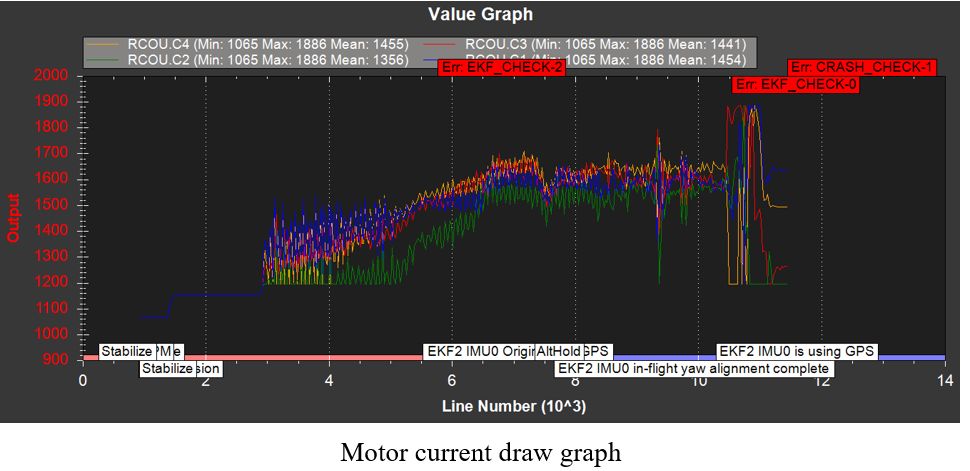
7。 RCOUT
一個。 C1/C2/C3/C4:電機1至4的電機電流
8。 VIBE
一個。 Vibe X/Y/Z:不同軸的振動
步驟104:15.3

只需勾選方框在右下方面板上您想要analsye的參數以及該參數的相應圖形將被生成。建議在分析新參數之前取消選中不相關的參數,以便可以適當地重置圖表的比例。要增加圖形的大小,請將光標移動到雙點劃線,然后向下拖動以展開圖形。這又占據了它下方的空間。
如果要保存圖形,請右鍵單擊并將圖像另存為’。更簡單的是,使用剪切工具裁剪要保存或復制的位置。下載Snipping Tool的鏈接如下:
https://snipping-tool-plus-plus.en.softonic.com/do 。。.
它需要Java工具才能運行:下載Java的鏈接如下:https://www.java.com/en/
步驟105:15.4
航班數據有助于找出崩潰,故障或無法執行特定功能的原因。例如,如果四軸飛行器在高度保持模式下持續下降,請查看氣壓計數據,以查看氣壓計對高度的感知是否正常工作。
步驟106:15.5
與下載的二進制日志文件一起是航班的KMZ文件。可以使用Goggle Earth pro軟件打開KMZ文件。在PC中導航到C:\ Users \ Username \ Mission Planner \ logs \ QUADROTOR \ 1,然后使用Google地球專業版打開KMZ文件。
從Google地球專業版,您將能夠分析您的在3D街景中飛行,
步驟107:15.6
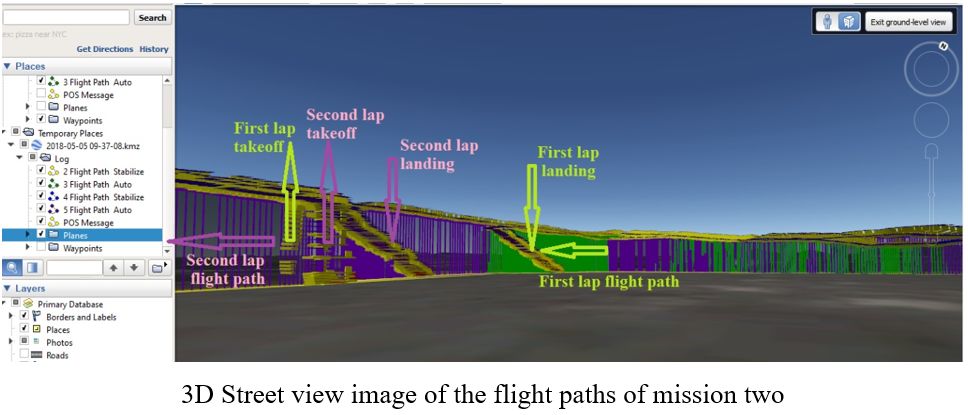
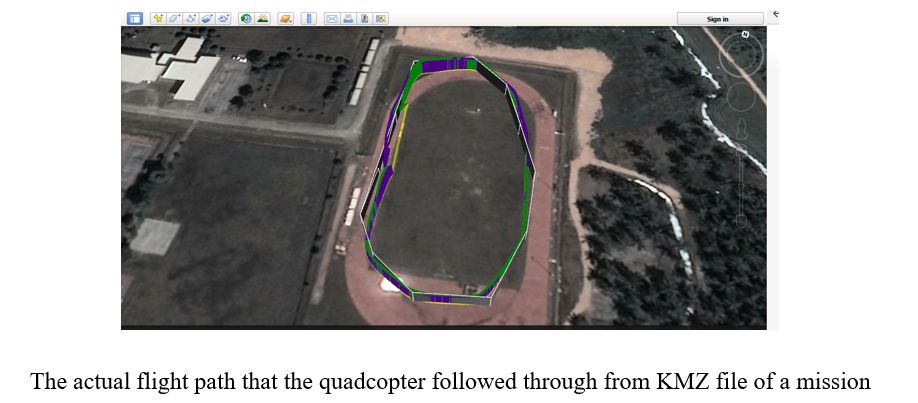
可以使用Google earth pro觀察3D街景圖像。根據飛行模式的切換區分不同的飛行路徑,如上面左側面板所示。可以從列表中取消選擇飛行路徑,如左側面板中所示。未經檢查的飛行模式將從3D地圖中消失,僅留下已檢查的飛行路徑。從上圖可以看出,綠色路徑是四軸飛行器所遵循的自動模式飛行路徑的第一圈,而重疊的紫色路徑是自動模式的第二圈。
飛行路徑的水平距離測量可以是使用軟件中的標尺工具完成。
步驟108:16.0對象避免實現
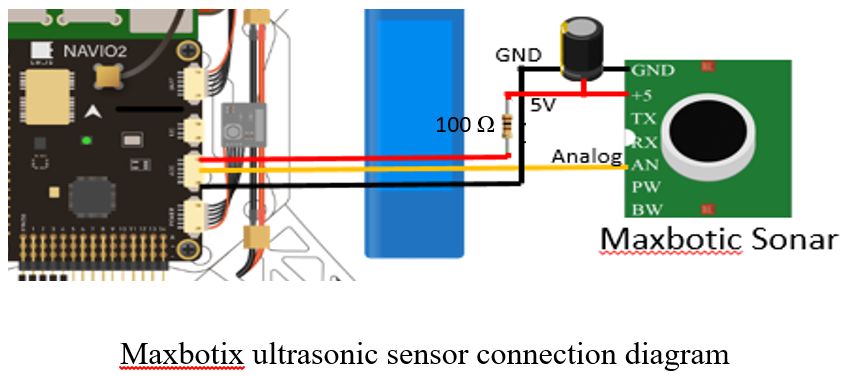
APM支持對象避免最多2個方向。通過Maxbotix的LV-MaxSonar-EZ0高性能聲納,四軸飛行器能夠避開6.45米范圍內的障礙物。這種昂貴的EZ0傳感器僅用于四軸飛行器上方的物體檢測,以避免在四軸飛行器起飛或上升時撞擊物體。 MaxSonar與Navio2 FC的連接是通過模數轉換器(ADC)引腳連接,如下圖所示連接FC的電壓,接地和模擬引腳到聲納。要建立物理連接,必須在線購買Navio2采用的6引腳ADC的微插頭引腳。標頭引腳也適合其他端口,只要引腳數匹配。
步驟109:16.1



正如所研究的那樣,在電源消耗高的時候,將100uF電容與電源并聯,以穩定電源。一個100Ω串聯電阻以在空閑期間調節高邏輯狀態。這種配置一起帶來了MaxSonar傳感器讀數的一致值。
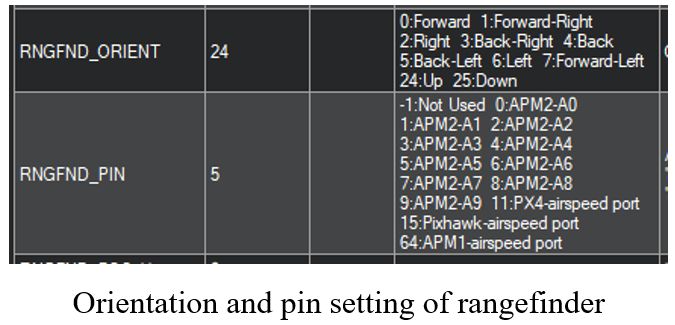
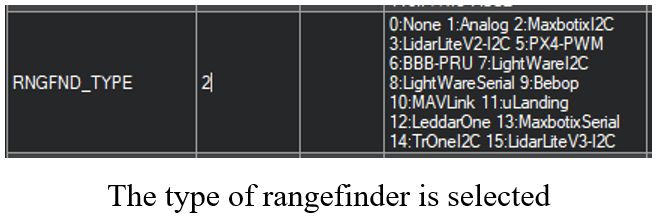
在Mission Planner軟件的“完整參數列表”中進行了設置。“選項卡以啟用測距儀并指定它將對其起作用的方向。對于UP方向,測距儀方向設置為24,并且測距儀引腳設置為5,連接到Navio2上的引腳ADC 3,如下所示。顯示所需參數列表中的其他所需設置。使用“ find”搜索它們。功能
步驟110:16.2
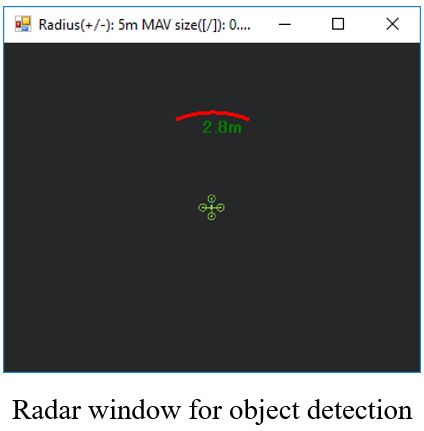
實時傳感器數據未顯示除測距以外的所有方向或測距儀中的25初始設置中的選項卡,但顯示在由Ctrl-F快捷鍵啟動的臨時菜單中的接近按鈕啟動的半徑雷達中。請注意,當方向設置為向上或向下時,二維雷達不會顯示距離。
步驟111:16.3
確認后聲納正在通過雷達窗口進行監控并測試不同距離的數據,然后四軸飛行器可以安全地避開障礙物。傳感器根據設定的方向正確安裝,確保四軸飛行器上的物體(如接線或GPS支架)沒有進入ping的行進路徑。四軸飛行器處于待命狀態,然后僅切換到引導或高度保持模式以避免物體。
現有的物體避讓系統強調了一些限制,目前Emlid開發人員仍在開發中。限制包括昂貴的超聲波傳感器,物體避免可以工作的模式的限制,以及物體避免系統可以工作的方向的限制。
來自https://shaofuhw.github.io/Portfolio/的Shao Fu已經提出了一個使用HC-SR04超聲波傳感器的解決方案,用于在他的YouTube頻道中實現避免對象https://www .youtube.com/watch?v = kmpxkKq3zNA
步驟112:16.4
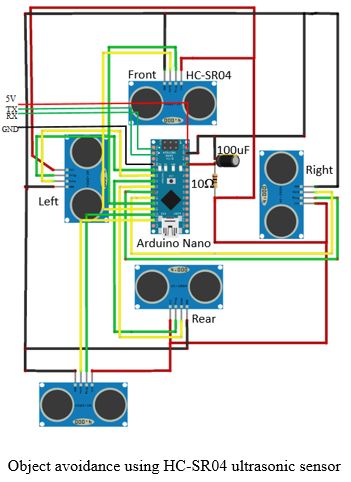
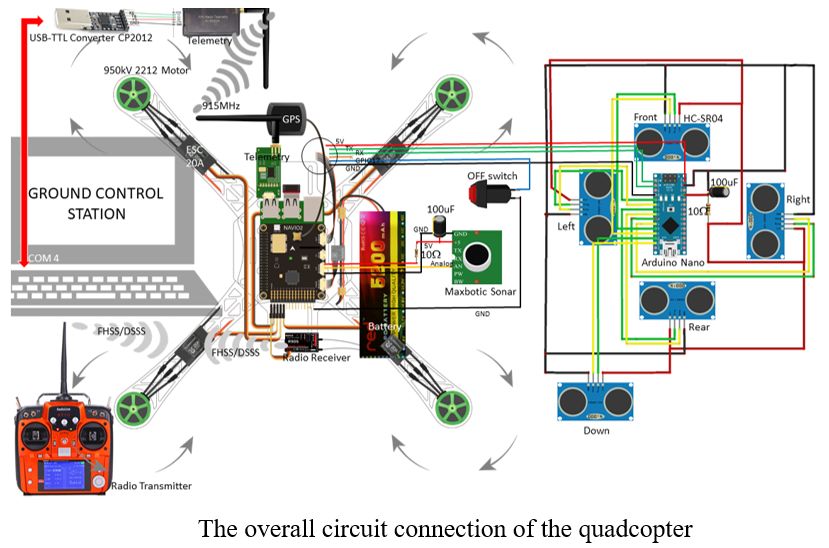
如上所示,五個便宜超聲波傳感器HC-SR04用于前,右,后,左,下方向的物體檢測。 Arduino微控制器充當接收傳感器數據的處理器并相應地生成響應。使用Arduino Nano是因為它體積小,重量相對較輕。繪制了與所有傳感器的Arduino連接,并繪制了完整的電路圖。
步驟113:16.5
這次,系統通過UART串口連接到FC。 5V和接地完成供電電路為Arduino Nano供電,而FC的發送器(TX)引腳連接到Arduino Nano的接收器(RX)引腳。同樣,FC的RX引腳連接到Arduino的TX引腳。 UART端口最初用于遙測空氣模塊,以實現與GCS中的地面模塊的通信。為了讓對象避免系統讓路,需要一個簡單的修改和一個額外的組件,這樣可以節省UART端口。
訣竅是交換地面和空氣模塊,現在通過地面模塊連接FC上的USB端口和空氣模塊已連接到GCS。有關詳細信息,請參見遙測組件下的“無人機硬件設置”部分。
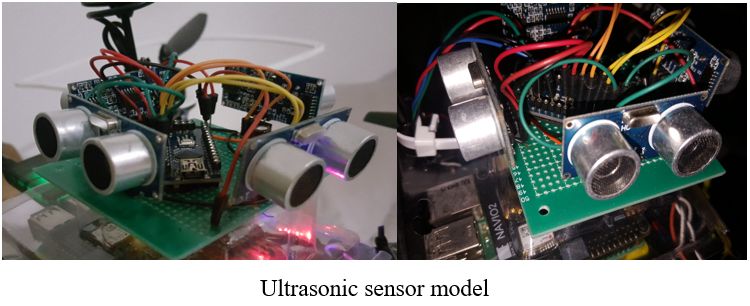
所需的連接點正在銅板上精確緊密地焊接。使用跳線來緩和連接,并將母頭針焊接到位以在每個方向上安裝超聲波傳感器,如下所示。同樣,添加了電容器和電阻器以提高每個傳感器的一致性。
步驟114:16.6
軟件物體避免系統的構建是使用Arduino軟件(IDE)構建的。對于距離測量,NewPing庫用于直接以厘米為單位檢索原始傳感器數據。為了提高傳感器的整體數據一致性,采用了5個傳感器讀數的平均值。據了解,聲納輸出零距離并不少見。當物體的距離超出檢測范圍或存在方向不確定性時,就會發生這種情況。為了避免平均值受到這些誤差的影響,只取得至少4個非零讀數的平均值,否則丟棄。
通過發送包含信號的mavlink pakages來實現俯仰和滾轉響應現有的滾動和俯仰值。從數據閃光日志中,當四軸飛行器穩定時,輸入RC通道顯示接近1500的俯仰和滾轉值。當四軸飛行器向下傾斜時,該值下降到1500以下,而當傾斜時,該值在音高通道中上升到1500以上。同樣,當四軸飛行器向右傾斜時,它會在滾動通道中上升到1500以上,反之亦然。
步驟115:16.7
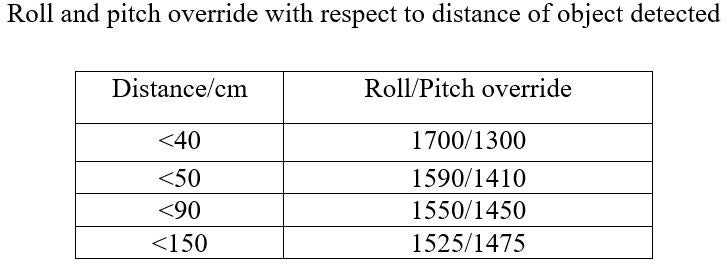
這條信息至關重要,因為從Arduino微控制器發送到FC的Mavlink消息將是覆蓋相應無線電信道中的那些值的消息。 Arduino軟件的編碼方式是,當檢測到的最近距離減小時,滾動間距值的變化會增加。
步驟116:16.8
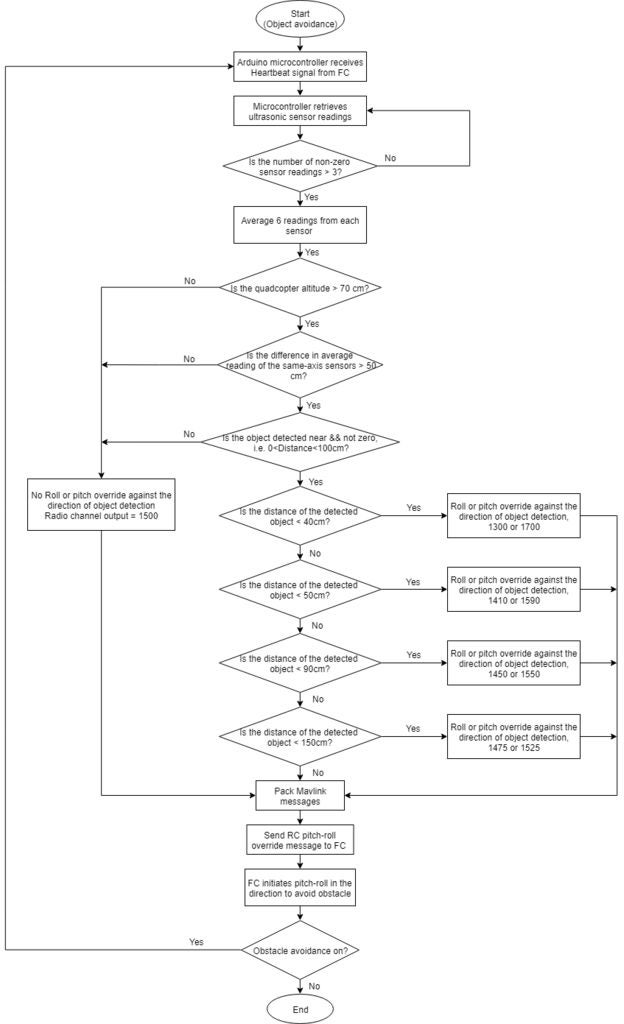
只要滿足上表中列出的標準,就不會立即啟動回復。必須同時滿足其他幾個條件,以確保只在必要時和環境允許時才進行響應。
首先,四軸飛行器只能在任何飛行模式下開始避開物體當“向下”超聲波傳感器顯示高度超過一定高度時。這樣可以在起飛過程中穩定飛行,不必要的傾斜會導致四軸飛行器的部分撞擊地面。只有在確保四軸飛行器與地面之間有足夠的間隙才能執行定義的俯仰或滾轉之后,物體避免才能控制飛行。
其次,特定傳感器的物體探測距離必須達到遠離距離小于指定值,即100厘米。在其背景下的“近”被定義為非零值 - 如果障礙距離太遠 - 低于100厘米。
第三,沿同一軸的距離傳感器必須同意響應一種方法,即四軸飛行器將作用的響應方向必須沒有障礙物。換句話說,如果前傳感器上的物體距離與后傳感器的物體距離之差不超過安全指定值,即使存在看似滿足的障礙物,四軸飛行器也不會向后傾斜前兩個條件。
在Arduino Nano上傳草圖期間,必須將TX和RX引腳從Arduino斷開連接到FC。 Arduino上的LED閃爍表示兩個組件之間的某些信息交換。例如,Arduino被編碼為每秒接收來自FC的RX引腳心跳信號。反之,只要滿足指定的一組響應,Arduino的TX引腳就會向FC發送超越信號。
當滿足所有條件時,在標準UART發送功能中發送包含新RollOut和PitchOut值的RC覆蓋mavlink消息。由于程序在循環中運行,一旦障礙物與特定傳感器保持距離,響應應該停止并返回零俯仰或滾動的初始值,即1500.
避免物體的測試是通過將四軸飛行器的四個側面約束到如上所示構建的PVC矩形結構來實現。
-
無人機
+關注
關注
231文章
10796瀏覽量
186073
發布評論請先 登錄
小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關教程)
Vicor高密度電源模塊助力輕型飛行器設計
小型飛行器專用 AS-DR01模擬信號AI識別跟蹤模塊

《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總

激光毀傷系統:低空飛行器的 “隱形獵手”
飛行汽車興起,連接器/線纜將面臨哪些挑戰?
MATLAB在低空飛行器中的應用

欣旺達:已具備低空飛行器電池研發生產能力
嵌入式學習-飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
一種面向飛行試驗的數據融合框架

開源項目!DIY了一臺無人機,用全志T113芯片
利用圖像處理板避障 讓小型飛行器像昆蟲一樣靈巧





 工商網監
工商網監
評論