 怎樣用Arduino制作自己的盆景
怎樣用Arduino制作自己的盆景
第1步:
請看一下上面的視頻,快速了解如何進行磁懸浮。
請注意視頻中的說明非常簡單,并沒有完整的啟動提示。只需看一下視頻,然后按照以下所有步驟確保您可以成功制作自己的空氣盆景。
第2步:工作原理
我發現并意識到kickstarter air-bonsai版本的電路相當復雜,沒有任何微控制器,我沒有任何知識它的模擬電路似乎沒有辦法做到這一點。仔細觀察之后,我意識到它的原理非常簡單,那就是讓一塊磁鐵浮在另一塊磁鐵上面。我所有的休息工作都是讓浮動磁鐵不會掉下來。
我認為使用Arduino實際上要比計算模擬電路容易得多。我以這種方式取得了成功,真的更加簡單。
磁懸浮由兩部分組成,基部和浮動部分。
基座
這部分位于底部,由磁鐵構成圓形磁場和電磁鐵控制磁場。
每個磁鐵都有兩個極點:北極和南極。實驗表明,對立吸引和同極排斥。四個圓柱形磁鐵放置在正方形并具有相同的極性,向上形成一個圓形磁場,以推動任何磁鐵,磁鐵之間有一個相同的磁極。
共有四個電磁鐵,它們被放置在一個正方形中,兩個對稱的磁鐵是一對,它們的磁場總是相反。
霍爾傳感器和驅動電路控制著電磁鐵。通過將電流轉移到電磁鐵上,在電磁鐵上形成相反的電極。
2. F 弱電
在基座上方放置一塊磁鐵,可以放一個小鍋。
它是如何工作的?
磁鐵頂部由底部磁鐵的磁場提升,因為它們是相同的磁極。然而,它傾向于翻倒并相互吸引。
為了防止頂部磁鐵片倒置和掉落,電磁鐵會產生磁場推動或拉動以平衡它,這要歸功于霍爾傳感器。
電磁鐵在兩個X和Y軸上控制,導致上磁鐵保持平衡和浮動。
控制電磁鐵并不容易,這需要你掌握知識PID控制器的詳細信息,將在下一步中詳細討論。
步驟3:PID控制器
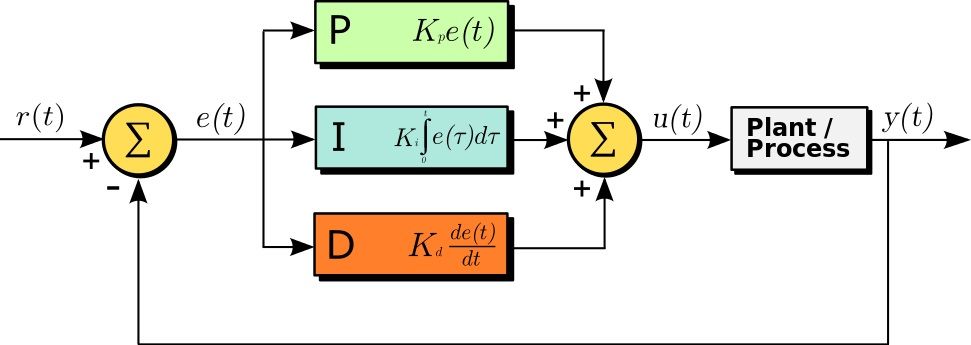
什么是PID?
來自維基百科:“比例 - 積分 - 微分控制器(PID控制器或三項控制器)是一種廣泛用于工業控制系統的控制回路反饋機制需要連續調制控制的各種其他應用.PID控制器連續計算誤差值{ displaystyle e(t)}作為所需s之間的差值etpoint(SP)和一個測量過程變量(PV)并根據比例,積分和微分項(分別用P,I和D表示)進行校正,給控制器起名。“
用一種簡單的方法來理解:“PID控制器計算‘誤差’值作為測量的[輸入]和所需設定值之間的差值。控制器嘗試通過調整[輸出]來最小化錯誤。“
因此,您告訴PID要測量的內容(”輸入“),您希望測量的位置(”設定值“) ,)和要調整的變量可以實現(“輸出”。)
在Youtube中了解PID容易:https://www.youtube.com/watch?v = ur0hOmjaHp0
PID然后調整輸出,試圖使輸入等于設定值。作為參考,在汽車中,輸入,設定點和輸出分別是速度,期望速度和油門角度。/p》
在這個項目中:
1.T 他輸入是來自大廳的當前實時值傳感器,由于浮動磁鐵的位置會實時變化而連續更新。
2.設定值是霍爾傳感器的值,當浮動磁鐵測量時位于磁鐵基座中心的平衡位置。該指數是固定的,不會改變時間。
3。輸出將是控制電磁鐵的速度。
感謝Arduino社區編寫PID庫并且它非常易于使用。
有關Arduino PID的更多信息,請訪問https://playground.arduino.cc/Code/PIDLibrary
我們需要在Arduino中使用一對PID控制器,一個用于X軸,另一個用于Y軸。
現在是時間開始購買必要的組件。
第4步:材料清單
以下是您需要為此項目購買的組件列表,請確保在開始之前完成所有這些組件。
有些組件非常受歡迎,我相信您已經有自己的庫存。
組件附帶數量和建議的鏈接。大多數建議鏈接來自Aliexpress,您可以在那里購買便宜和免費送貨。您可以在其他地方購買,只要您能以最簡單的方式購買。
LM324N - X1 - $ 0.87
懸浮線圈 - X4 - $ 14.09
SS495a霍爾傳感器 - X2 - $ 5.44
12V 2A DC適配器 - X1 - $ 8.82
環形磁鐵D15 * 4mm - X8 - $ 6.8
直流電源插孔 - X1 - $ 1.64
環形磁鐵D15 * 3mm - X4 - $ 4.11
Arduino pro mini - X1 - $ 3.2
L298N模塊 - X1 - $ 2.25
14針插座 - X1 - $ 1.91
磁鐵D35 * 5mm - X2 - $ 6.65
5.6K歐姆電阻 - X2
180K歐姆電阻 - X2
47K歐姆電阻 - X2
10K歐姆電位器 - X2
亞克力板A5尺寸 - X1
木鍋 - X1
PCB面包板 - X1
3mm螺絲 - X8
電線
迷你計劃,如肉質,仙人掌,迷你盆景
第5步:工具
以下是最常用的工具列表。
烙鐵
手鋸
Scew drivers
Osilloscope(optinal,你可以使用萬用表)
表鉆孔
熱膠槍
電子鉗
第6步:LM324 Opamp和L298N驅動器和SS495a
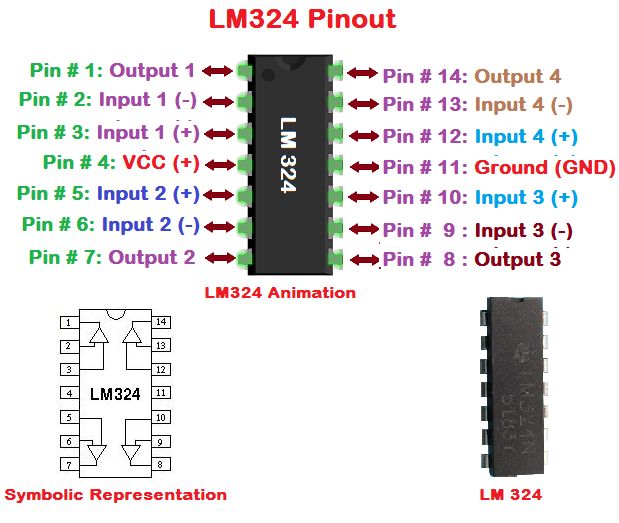
LM324運算放大器
運算放大器(op-amps)是目前使用中最重要,最廣泛使用和最通用的電路之一。
我們使用運算放大器來放大來自大廳的信號傳感器,目的是增加靈敏度,使arduino容易識別磁場的變化。當僅在霍爾傳感器的輸出處改變幾mV時,通過放大器后可以在Arduino中改變幾百個單位。這對于保持PID控制器的平穩性和穩定性是必要的。
在本教程中了解有關運算放大器如何工作的更多信息。
我選擇的常見運算放大器IC是LM324,它是非常便宜,你可以在任何電子商店購買。 LM324有4個內部放大器,可以靈活使用,但在這個項目中我只需要兩個放大器,一個用于X軸,另一個用于Y軸。
你可以找到如何組裝LM324在后續步驟中。
L298N模塊
雙H橋L298N通常用于控制兩臺直流電機的電機速度和方向,或者輕松控制一個雙極步進電機。 L298N H橋模塊可用于電壓介于5和35V DC之間的電機。
還有一個板載5V穩壓器,所以如果你的電源電壓高達12V,你也可以從電路板上提供5V電壓。
在這個項目中,我使用L298N控制兩對電磁鐵線圈,用5V輸出給Arduino和霍爾傳感器供電。
模塊引腳:
輸出2:電磁鐵對
輸出3:電磁鐵對
輸入電源:DC 12V輸入
GND:地面
5v:5v輸出到Arduino和霍爾傳感器
EnA:為Out 2啟用PWM信號
In1:啟用Out 2
In2:啟用Out 2
In3:啟用輸出3
In4:啟用輸出3
EnB:啟用Out3的PWM信號
連接到Arduino:我們需要移除EnA和EnB引腳中的2個跳線,然后將6個引腳In1,In2,In3,In4,EnA,EnB連接到Arduino。詳細信息請參見以下步驟。
在本說明書中了解有關L298N模塊的更多信息。
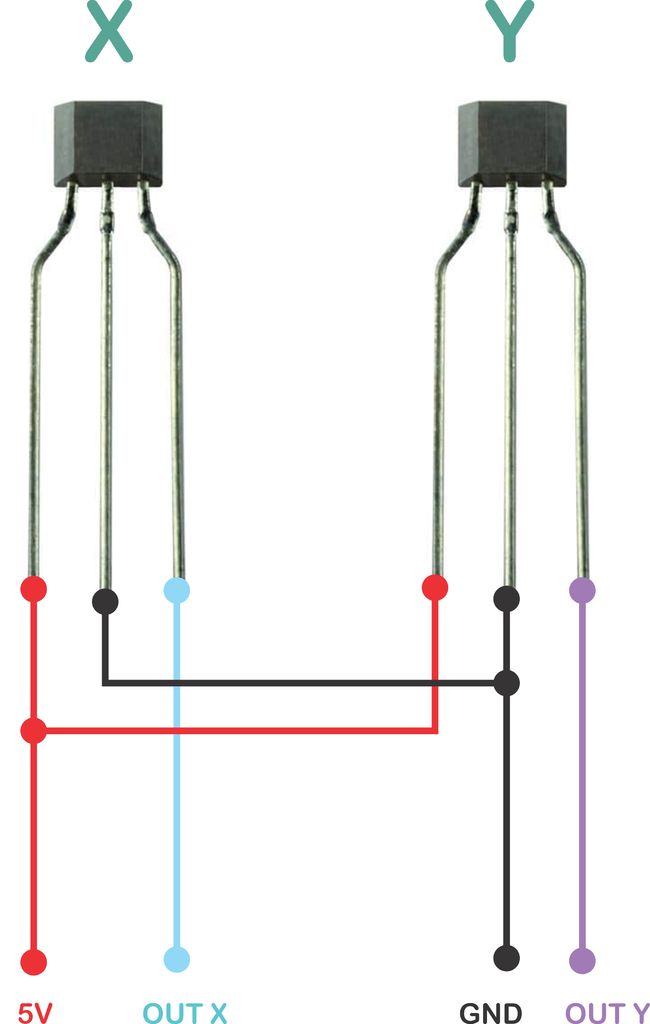
SS495a霍爾傳感器
SS495a是線性霍爾傳感器帶模擬輸出。
注意模擬輸出和數字輸出之間的區別,你不能在這個項目中使用帶數字輸出的傳感器,它只有兩個狀態1或0,所以你可以測量磁場的輸出。
模擬傳感器的電壓范圍為250mV至Vcc,您可以使用Arduino的模擬輸入讀取。
兩個霍爾傳感器是需要測量X和Y軸的磁場。
步驟7:釹磁鐵Ndfeb磁鐵
維基百科:“釹是一種鐵磁性金屬(更具體地說它具有反鐵磁性質),這意味著它可以像鐵一樣被磁化成磁鐵,但它的居里溫度是19 K(-254°C),所以在純凈的形式下,它的磁性只出現在極低的溫度下釹與過渡金屬如鐵的化合物可以使居里溫度遠高于室溫,這些用于制造釹磁鐵。“
STRONG,這就是我用來形容釹磁鐵的詞。你不能使用鐵氧體磁鐵,因為它們的磁性太弱。釹磁鐵比鐵氧體磁鐵貴得多。
小磁鐵用于制作基座,大磁鐵用于制造浮動磁鐵。
警告:您需要小心使用釹磁鐵,因為它們的強磁性會傷害您,或者它會破壞您的硬盤驅動器或其他受磁場影響的電子設備的數據。
提示:您只能將兩塊磁鐵拉到水平方向,將它們分開,因為它們的磁場太強,所以不能將它們分開。它們也非常易碎并易于破碎。
步驟8:準備底座的蓋子
《我使用一個直徑為3 3/4“的小陶罐,通常用于生長多汁或仙人掌。你也可以使用陶瓷鍋或木鍋,只要它們完美搭配。
使用8毫米鉆頭在鍋底部附近創建一個孔,用于固定直流插孔。
提示:你應該使用平木頭來鉆到陶土鍋里,我用了一個鐵鉆,幾乎燒了,真的沒用。
你也可以用水來冷卻鉆頭,避免使鉆頭過熱。
步驟9:3D打印浮動磁鐵座和丙烯酸激光切割
3D打印
使用我附帶的STL文件打印浮動磁鐵支架。
如果您有可用的3D打印機,這真的很棒。祝賀你離子,你有機會用這臺機器制造一切。如果沒有,請不要失望,因為您可以使用現在非常流行的廉價3D打印服務。
提示:您只需要大約20分鐘即可完成此部分并且僅填充30%。
激光切割
您應該使用本地激光切割服務切割兩個帶有文件的丙烯酸片,我附上作為AcrylicLaserCut.dwg。這是一個autocad文件。
丙烯酸片用于支撐磁鐵和電磁鐵,其余部分用于覆蓋陶土鍋的表面。
步驟10:準備SS495a霍爾傳感器模塊
將pcb面包板切成兩塊,一塊到將霍爾傳感器和另一個連接到LM324電路上。
將兩個磁傳感器垂直連接到pcb上。注意兩側刻有傳感器相互旋轉,固定焊接。
用細線將傳感器的兩個VCC引腳連接在一起,用GND引腳做同樣的操作。輸出引腳是分開的。
步驟11:運算放大器電路
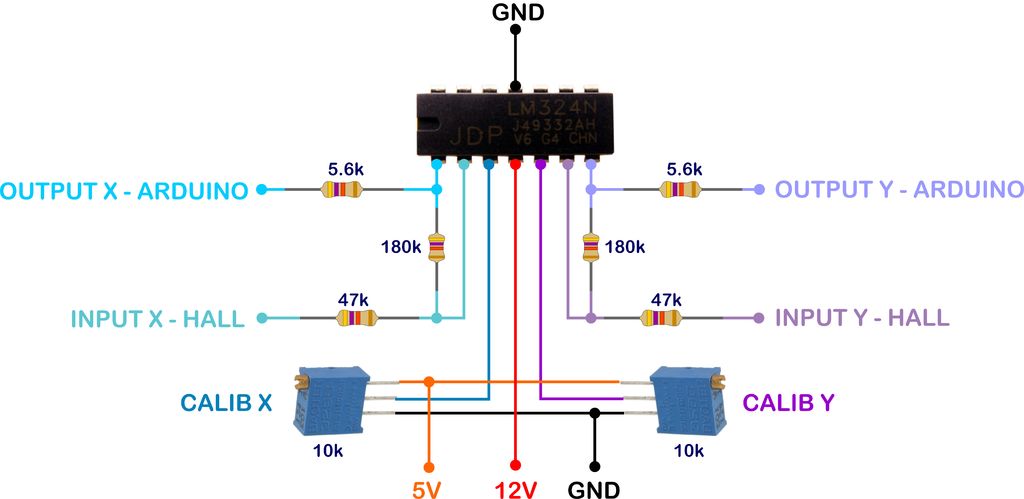
按照原理圖將插座和電阻焊接到PCB,注意將兩個電位器放在同一方向,以便以后輕松校準。
連接LM324然后將霍爾傳感器模塊的兩個輸出連接到運算放大器電路。
連接兩根LM324輸出線連接到Arduino。 12V輸入應與L298N模塊的12V輸入共用,L298N模塊的5V輸出連接到5V電位器。
步驟12:組裝電磁鐵
將電磁鐵裝配到丙烯酸板上,注意固定在靠近中心的四個孔處。/p》
擰緊螺釘以避免移動。
因為電磁鐵在中心對稱,所以它們總是在相反的磁極上,因此電磁鐵內部的電線連接在一起,電磁鐵外側的電線連接到H型驅動器L298N。
將丙烯酸板下的電線穿過附近的孔連接到L298N。
提示:銅線上涂有絕緣層,因此在將它們焊接在一起之前必須用刀將其取下,記得在焊接后使用熱縮管。
步驟13:附上th e傳感器模塊和磁鐵
使用熱膠將傳感器模塊固定在電磁鐵之間,注意每個傳感器必須是正方形的兩個電磁鐵,一個在前面,另一個在后面。
嘗試盡可能集中校準兩個傳感器,這樣它們就不會重疊,這將使傳感器最有效。
下一步是將磁鐵組裝在丙烯酸基底上。將兩個D15 * 4mm磁鐵和一個D15 * 3mm磁鐵組合在一起形成一個圓柱體,這將使磁鐵和電磁鐵具有相同的高度。
在兩對電磁鐵之間組裝磁鐵,注意極向上的磁鐵必須相同。
步驟14:直流電源插座和L298N 5V輸出
用兩根電線焊接直流電源插孔并使用熱縮管。將DC電源插孔連接到L298N模塊的輸入端,其5V輸出將為Arduino供電。
步驟15:L298N和Arduino
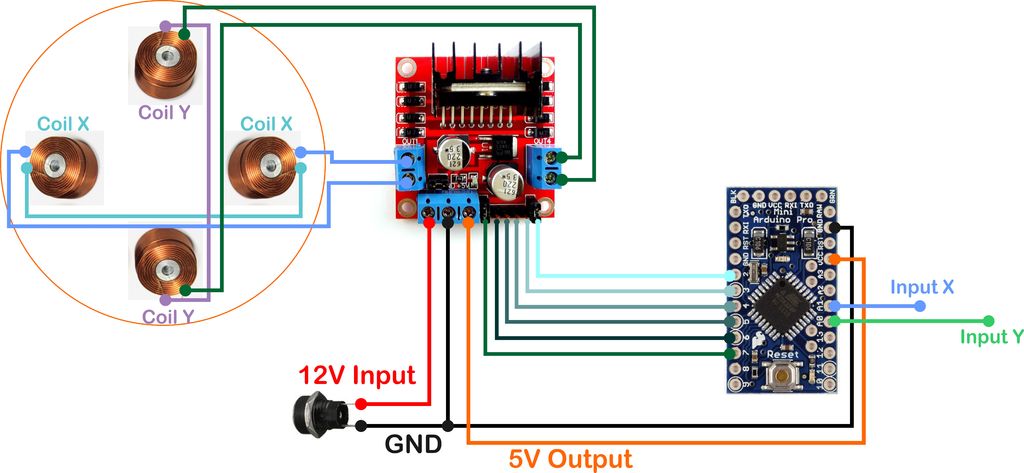
將L298N模塊連接到上面的原理圖后面的Arduino。
L298N ===》 Arduino
輸出5V ===》 VCC
GND ===》 GND
EnA ===》 7
In1 ===》 6
In2 ===》 5
In3 ===》 4
In4 ===》 3
EnB ===》 2
步驟16:Arduino Pro Mini Progamming
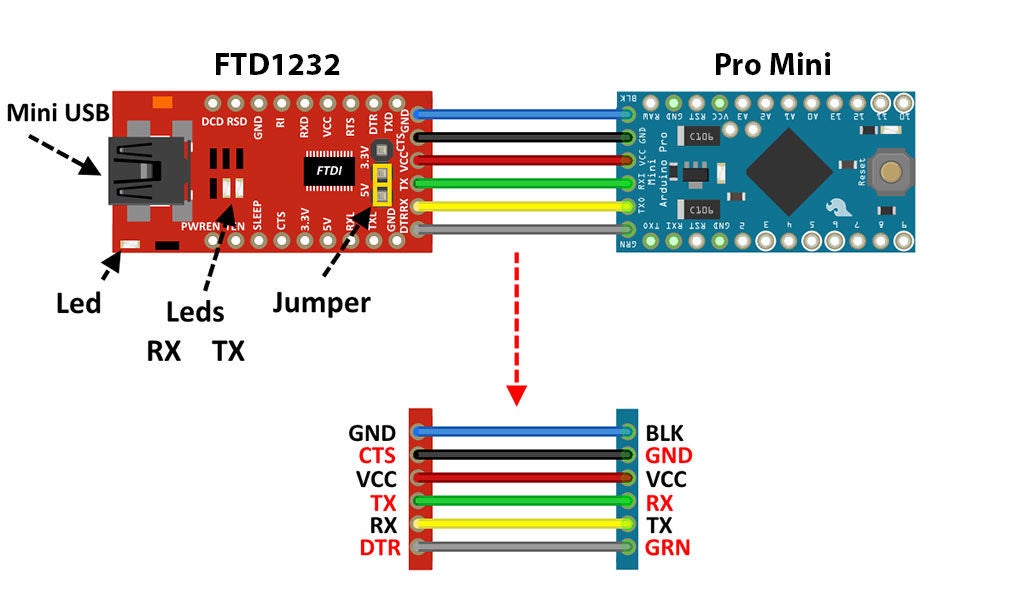
由于Arduino pro mini沒有任何usb到串口,你需要連接外部編程器。
FTDI Basic將用于編程(和Pro Mini。
按照此Sparkfun指令獲取更多信息。
步驟17:浮動片的準備
將兩個D35 * 5磁鐵連接在一起以增加磁力。
步驟18:校準設定值
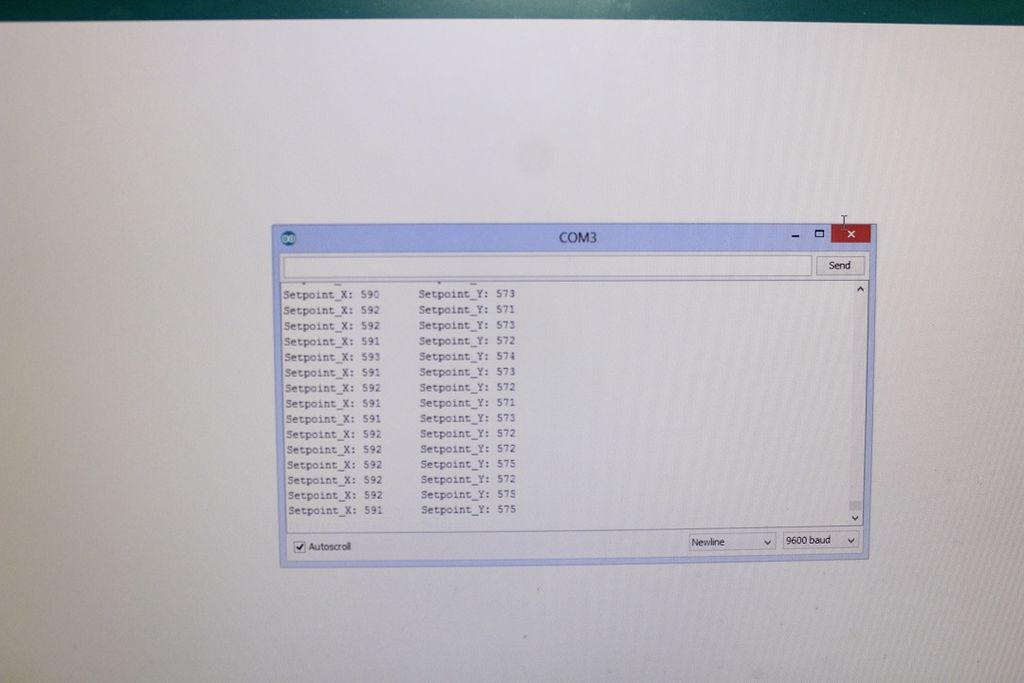
將程序ReadSetpoint.ino加載到我附加的Arduino。該程序將讀取霍爾傳感器的值并通過串口將其發送到計算機。打開COM端口即可看到它。
將12V DC插入直流電源插孔,您還可以使用示波器讀取傳感器值。
觀察屏幕上的數值,進行調整通過調節兩個電位器。最佳值為560,此時傳感器的輸出約為2.5V。
設定設定值后,將浮動磁鐵片放在基座上方并搖動以查看設定值的變化在屏幕上。
提示:分別在X和Y軸上標記這對電磁鐵和電位計,以便以后輕松糾正它們。
步驟19:加載主程序
校準設定值后,現在是享受結果的時間。
加載Levitation.ino主程序,我已在下面附上。
使用超級膠水修復磁片和磁鐵支架,之前是3D打印的。
提示:加載主程序后,可以對電位器進行小幅調整,使浮動件固定在中心。
第20步:全部放在一起
首先將DC電源插孔連接到電位器上,然后將剩余部分放入電位器。
最后,使用剩余的丙烯酸板制作鍋的表面。
步驟21:準備工廠
將木鍋連接到漂浮的磁鐵片上。
我用一個小仙人掌種植。您可以使用仙人掌或多肉植物或任何對稱或小而輕的迷你盆景。
步驟22:完成并享受
享受您的成果,您的努力將在您自己的桌面上使用盆景氣罐,這是由你自己制作的。
責任編輯:wv
-
Arduino
+關注
關注
189文章
6494瀏覽量
190324
發布評論請先 登錄
《ESP32S3 Arduino開發指南》第二章 Arduino基礎知識
自己設計的Arduino UNO R3主控板原理圖+PCB源文件(可直接打樣)
開源項目!基于 Arduino 的 MIDI 架子鼓
請問TAS5706如何用硬件控制I2C?
多個TLV320AIC3254用一路I2C總線對其配置可行嗎?
怎樣選擇適合自己的點焊機
如何用5509A產生一個白噪聲,經AIC23播放出來然后再用AIC23采集這個聲音?
怎樣用自己的電腦遠程公司的電腦






 工商網監
工商網監
評論