 怎樣使用FPV構建無人機
怎樣使用FPV構建無人機

步驟1:FPV是否?


FPV,但這并不意味著您應該跳過視線,因為這是非常必要且良好的實踐,這也將幫助您FPVing 。..
但是,等等,這是什么?
FPV意味著在無人機上安裝了一個小型攝像機和一個視頻發射器(VTX),您可以通過護目鏡駕駛它,以鳥瞰或更精確的第一人稱視角查看無人機。
線路視距飛行的意思是您從視線觀察無人機并進行控制,我認為,像這樣飛行比較困難,但是學習如何飛行很重要。
此外,FPV中的飛行是不同的體驗,您會忘記自己在地面上而成為無人機。
有時您自己一個人飛翔,并充滿了一些體外體驗。..
但是,在FPV中飛行會更昂貴,還有更多零件和配件可供購買。..
步驟2:框架
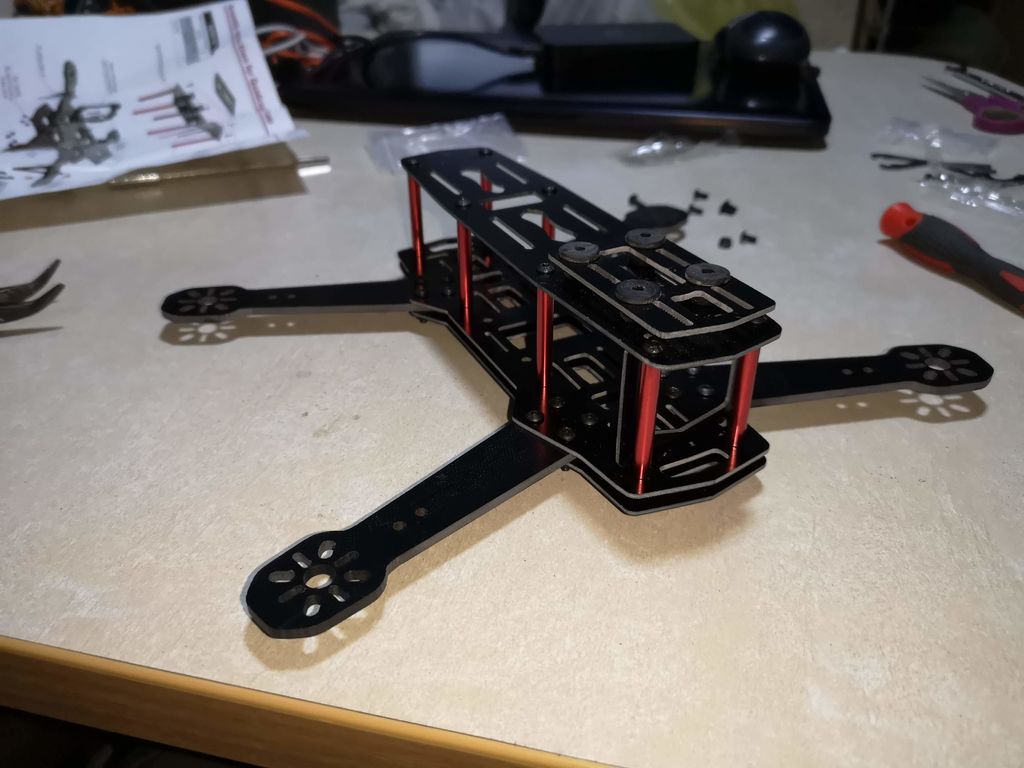

框架的形狀,尺寸和材料多種多樣。
通常,您可以用幾乎所有東西搭建自己的框架,并且它會飛起來,互聯網上充滿了由木頭制成的無人機。 》,紙板,塑料,湯匙,直尺,樂高玩具和許多其他東西。..
M您的第一個自行建造的無人機是用木頭制成的,它的問題是它非常脆弱,并且需要時間和練習來學習如何控制無人機。剛開始時,您可能會感到很迷戀,特別是如果您要嘗試將那些無人機帶到極限,因為那些自行建造的無人機可以做很多雜技并且可以達到高速……
因此,當您弄斷了木制無人機后,您可能想切換到更堅固的東西。
然后是塑料無人機(如F330機架),它比木制無人機更堅固,但是可能與片狀碳纖維框架的價格相同,從而將碳纖維框架帶入另一個層次。..
碳纖維框架除以道具長度2‘’,3‘ ’,5英寸等。
最常用的是5英寸,最近是3英寸和2.5英寸,這雖然有點時尚,但也受到技術變化的推動。
我最終使用的是QAV250框架(5英寸),該框架是芯片,可以在EBay和Banggood上輕松找到,但是最近,我決定將QAV250制動得很輕松之后轉向更堅固的碳纖維框架
步驟3:RC發送器


關于變送器,有很多事情要知道,削片機和昂貴的變送器之間有很大的區別。..可以添加一些模塊以改善范圍,有些可以與之通信您并警告您有關無人駕駛飛機的相關內容,例如信號丟失,例如,對于手腕有一種不同的感覺以及它們的準確性。..
現在,我只乘坐削片機,首先,我乘坐的是未知的發射器-然后,我購買了二手RadioLink,現在我主要使用FlySky,它是功能最強大的芯片發射器,但是,它遇到范圍問題,最近訂購了Jumper T16。
您應該知道的是,
-您必須在列表中有 6個頻道。
-發射機的類型不同-模式1,模式2等,模式表示油門桿在變送器上的位置,在左側或對,現在您可能認為應該將它放在優勢手上,嗯。..也許。..但是您應該知道,大多數無人機飛行員都使用模式2 ,如果您選擇其他選項,后來被發現是一個困難,并且不了解您所習慣的東西可能會變得困難得多。
-目前,最常用的發射器是FrSky Taranis X9D,但最近,它成為獲得Jumper T16的更明智的選擇。
此外,這兩家公司(FrSky和Jumper)之間也存在爭斗。
*模式2在左側操縱桿上有油門,在右側操縱桿上有偏航和俯仰和滾動。
* *注意要購買的模式,很難更改發射器的模式
步驟4:接收器
接收器是與發射器通信并將其傳遞給飛行控制器的部件。
接收器將位于列表3中引腳/連接,GND,Vcc,信號。
過去,每個通道都會通過自己的線路(并行)傳遞到FC(飛行控制器),但如今,通常是通過更快的電子設備和更智能的協議來傳遞
接收器通常在購買新產品時隨發送器一起提供,而不是在購買二手產品時總是如此。
并非所有接收器都能與所有發送器通信,每個公司都開發了自己的接收器通訊協議,有時多于一個,因此購買接收器時,應檢查它是否與您擁有的發射器相匹配。
請注意,我知道的唯一可以與大多數(如果不是全部)接收器通信的發射器是Jumper T16和Jumper T8SG支持多協議。
如今,大多數接收器都通過 S-BUS 協議與FC(飛行控制器)進行通信,還有更多這樣的 I-Bus 和其他,請確保您購買的接收器能夠與FC(飛行控制器)通信
*連接接收器(以及您要連接的每個板),請注意接收器的額定電壓,
為它提供太低的電壓會導致工作問題或根本無法工作,為它提供太高的電壓會炸掉它并毀壞電路板。
**大多數接收器都使用 5v
第5步:FC-飛行控制器


飛行控制器(FC)是無人機的大腦,它采用加速度計和陀螺儀之類的傳感器緊湊。
它接收來自傳感器的所有數據,以及從無人機飛行員通過發射機和遙控器獲得的輸入。接收器,并將所需的速度從每個電動機輸出到每個ESC,從而使電動機以所需的速度轉動。
通常,FC分為幾代,目前我們是第7代,但仍然是大多數無人機請使用3rd和4th。
而且,飛行控制器有多少RX/TX(輸入/輸出)。
您為什么需要它?很好地用于連接GPS,接收器,VTX Smart音頻,遙測等外圍設備。
另一個區別是FC處理數據和濾除噪聲的方式。
當今大多數FC在開放式環境下工作,名為BetaFlight的源軟件,但是還有Kiss and Ardupilot之類的東西。
這里是我要使用的FC的列表,首先是我不推薦的FC,然后是我使用的FC:
不推薦使用:
Naze32-第1代FC,曾經是一個不錯的FC,并且已經使用了很多年,但是現在非常有限,并且不能讓您在業余愛好。
OMNIBUS F4-多功能飛行器被認為是不錯的FC,但是我對USB連接太容易掉線感到不滿意。
HGLRC Flame-我對它的使用感覺很差,在飛行過程中墊子掉了
建議:
FlyWoo F405-我仍然在四邊形(無人駕駛飛機)的數量上使用此,飛行平穩。
DYS F4 ver2- DYS被認為是業余愛好中的好品牌,我仍在使用此FC,沒錯。
JHEMCU F7 AIO-最便宜的第七代雙陀螺儀,飛行良好。
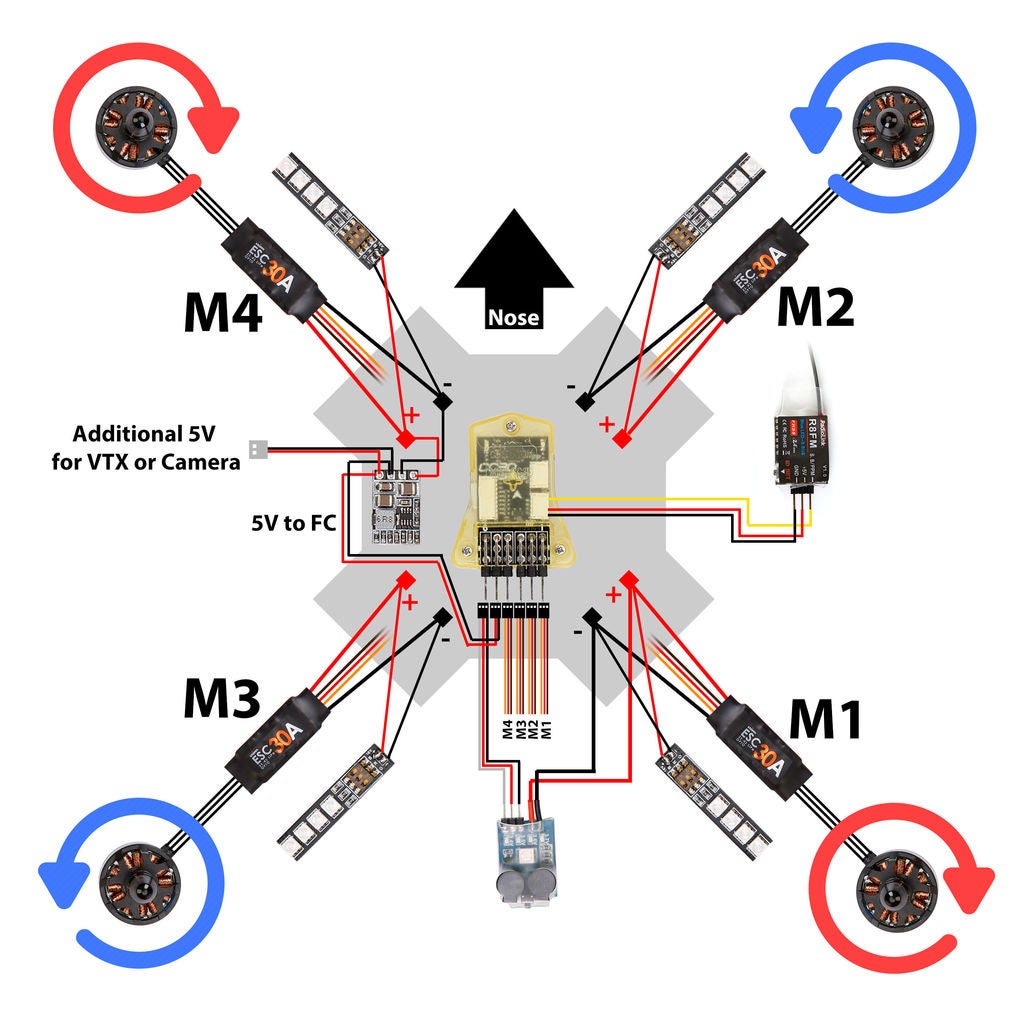
第6步:PDB-配電板
無人駕駛飛機消耗很少的電量,它使用的是RAW ESC和電動機的電池電壓,它為飛行控制器(FC)使用5v,有時為攝像機使用3.3v 。..
如今,大多數FC與配電板(PDB)結合使用),但并非總是如此,在這種情況下,您需要一個PDB來處理所有級別的電源。
我只能使用Matek PDB,但通常,您應該在清單4中擁有高功率ESC的連接,FC,接收器,VTX(視頻傳輸器)等的5v連接很少。
如果您的攝像機為3.3v,則有時需要5v甚至更多的電流才能實現3.3v連接。
PDB還將處理與電池的連接,今天的標準是XT60連接。
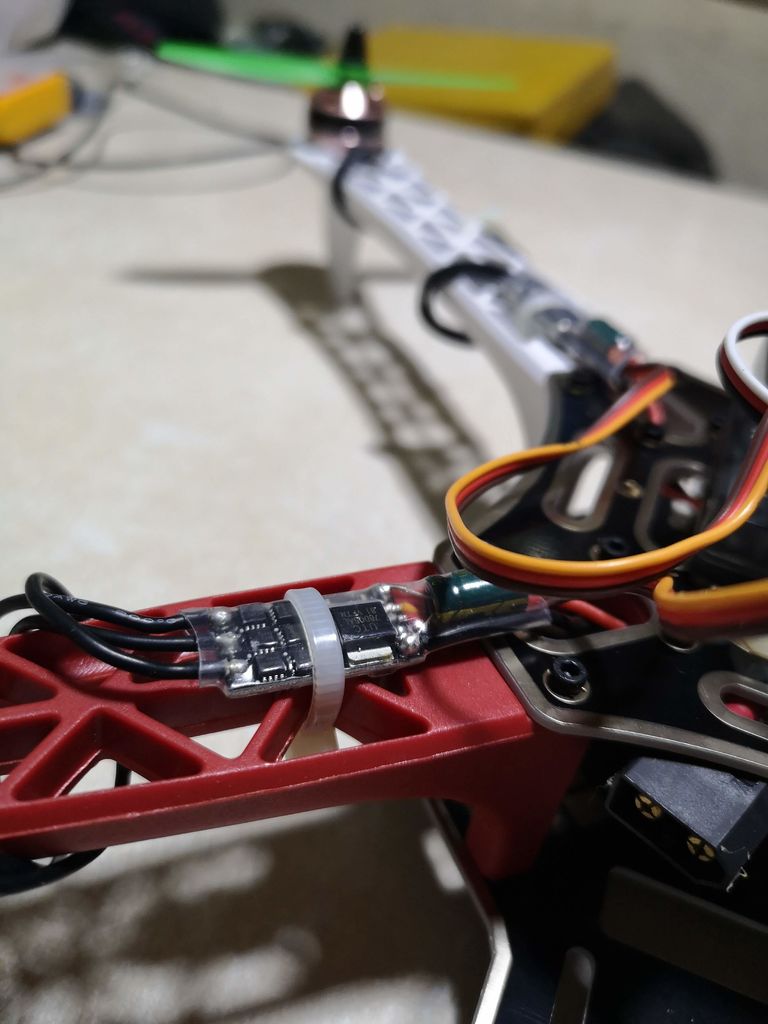
步驟7:ESC-電子速度控制器
隨著無刷電機變得越來越好和越來越小,無人機行業已經朝著它發展,但是不僅要連接正負號,并通過有刷電動機通過電壓對其進行控制,還需要一個ESC電調速器來控制其速度。
同樣,每個電動機都需要一個ESC您通常有4個。每個ESC都帶有3條連接到電動機的導線,而VCC和GND分別連接到PDB或FC上的RAW電池電壓,以及數據連接在相應的電動機連接上在FC上(有時會有額外的GND,您可以將其添加到主接地線并將它們焊接在一起。
您還可以在一塊ESC板上使用一個4英寸的ESC板,這樣可以節省您的空間(例如,在小型無人機中),并避免了許多連接和電線的麻煩,但是,有時ESC出現故障,需要進行更換,在這種情況下,您需要交換所有四個而不是一個。
ESC的額定等級如下:
-額定電流,表示ESC可以處理多少安培。
知道您需要多少電量取決于電動機,四邊形尺寸和所使用的電池。
通常,對于5英寸的四邊形來說30A就足夠了。
-協議-ESC幾乎沒有辦法“交談” ”與飛行控制器(FC),PWM,單發,多發,D-Shot
如今,大多數無人機都在D-Shot600列表中使用(600是其使用的速度),但飛行控制器(FC)和ESC應該能夠使用您選擇使用的協議。
您應該注意到ESC是BLHelli或BLHelli_s(軟件閃爍在其中)。
我是使用HAKRC 35A BLhelli32和BLhelli_s 30A,但有很多選擇。
第8步:電動機
電動機標有4位數字和一個KV編號。
KV是電動機在無負載的情況下每伏特旋轉的匝數,因此,較高的KV將旋轉得更快,但轉矩較小,而較低的KV將旋轉得更慢,但轉矩更大。
其他4位數字表示電動機的直徑和內部繞組的高度。
為設置選擇正確的電動機有時會反復嘗試,但通常為5英寸的四角將使用2300KV電動機。
我并沒有做太多的電動機實驗,我主要使用Race Star 2205 2300KV
第9步:鋰電池
為什么Li-Po可以將高電流提取到當前饑餓的電機中,但是Li-Pos可能很危險,應謹慎處理并以出現故障或人身傷害的最初跡象報廢。
切勿將它們完全耗盡,也不應過度充電,也不應將它們單獨充電或過夜充電。鋰電池
在無人機范圍內,我們使用的是1s/2s/3s/4s/5s或6s電池。
數字代表電池中的鋰電池數量,這會影響電池電壓和安培能力。
您應該注意到您的電動機和ESC電池座額定值,并且永遠不會提供超過其能承受的極限,因為您會燃燒它。
第二個是每小時可以供應的安培數,大多數無人機使用1300或1500毫安時,請注意,增大重量會增加重量。
當今的大多數無人機都使用4s電池,但是最近轉向6s電池。
步驟10:道具-螺旋槳
道具除以槳葉數量和它們制成的材料。
道具的設計很多,要由自己來決定。
我建議您從3或4刃的道具開始,因為它們更穩定
此外,請確保尺寸正確,每個鏡架都圍繞道具尺寸構建,因此5英寸的四角鏡架將使用5英寸的道具。
4個刃狀道具
3個刃狀道具
道具上的數字表示道具的大小和間距,例如5043為5英寸,間距為4個刀片和3個刀片
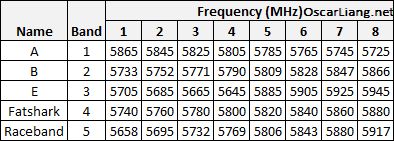
步驟11:VTX-視頻發送器
在這里,它可能會變得復雜,因為可以在VTX(視頻傳輸器)上添加各種功能,例如Smart Audio,這些功能不在此Instructable的范圍之內。
VTX連接到VCC(根據其上的V額定值-通常為5V)和GND,以及連接到飛行控制器(FC)上的VO(視頻輸出)。
它會拍攝從攝像機生成的視頻,從FC中添加OSD(屏幕顯示),然后通過空中將其傳輸到您看到的護目鏡(確保VTX和護目鏡在同一頻道上)
從一個足夠好的VTX開始非常重要,因為您可以管理其他東西而不是最好的開始,但是看不到您要飛的地方令人沮喪和成問題。
我嘗試了很多便宜的劣質VTX,讓我無法自拔并卡在樹上。..
最終,我發現Everyine 805 VTX相當好,而且不太膨脹。
您應該注意天線連接器,而不是SMA或RP-SMA,您需要的天線是其中之一。
最常用的RP-SMA
步驟12:攝像機
作為VTX,相機也應該是一款不錯的相機,因為您想看到自己在哪里飛行。
各種各樣的攝像頭,微距鏡頭和分體式相機,更不用說DJI HD系統正在改變整個愛好(不過我會再等一會兒再解決一些問題,然后再購買)。
我主要使用RunCam Eagle 2 Pro并與它玩得很開心,還有Caddx Turbo Eos2 1200TVL
攝像機已連接到FC或PDB上的VCC,但請確保已將其連接到正確的V額定值,即5v或3.3v或更高,地線已連接到GND。
視頻步驟13:最后-護目鏡
,已連接到FC VI(視頻輸入)。
直到最近,護目鏡世界還是由FatShark統治,但是最近卻淘汰了一些好的競爭對手,并詛咒DJI HD系統。
護目鏡世界是分為:
-Box護目鏡,它是一個大盒子中的一個屏幕。
-但大多數飛行員更喜歡兩個較小的屏幕,每個眼睛一個。
我說過世界是主導作者:FatShark HDO,但最近SkyZone 03O更好,Aomway也很好。..
您應該確保護目鏡具有:
-DVR-在護目鏡上記錄飛行非常重要
-分集-是兩種使用兩種天線并自動選擇更好接收效果的接收器方法。
責任編輯:wv
-
無人機
+關注
關注
230文章
10794瀏覽量
186070
發布評論請先 登錄
如何為樹莓派 FPV 戰斗無人機構建自動駕駛儀的“眼睛”!

使用 Betaflight 和樹莓派實現 FPV 無人機自主飛行!
磐啟微電子PAN3029芯片在無人機上的應用

《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總
科達嘉電感在無人機系統中的應用
半導體制冷模組賦能無人機巢:無人機效能 “熱”?點突破

光伏無人機自動巡檢系統的優勢價值
知語科技無人機反制系統的應用與挑戰





 工商網監
工商網監
評論