") 如何設(shè)置基于MTK3339芯片的Adafruit Ultimate GPS板以記錄到sdcard
如何設(shè)置基于MTK3339芯片的Adafruit Ultimate GPS板以記錄到sdcard

步驟1:
1)Arduino Mega 2560
Sainsmart mega也可以使用。
2)LCD鍵盤防護罩http://www.hobbytronics.co.uk/arduino-lcd-keypad-s.。。
sainsmart鍵盤防護罩也可以使用。
3)adafruit終極gps記錄器防護罩http://proto-pic.co.uk/adafruit-ultimate-gps-logge.。。
4)Arduino Stackable(Shield)接頭套件-R3 http://www.hobbytronics.co.uk/cables-connectors/p 。。.
將引腳從單排插頭連接器中拔出,并使用塑料為可堆疊的屏蔽插頭創(chuàng)建一定長度的墊片
5)紅色/綠色雙色公共陰極,直徑為3/5mm
6)Micro SD存儲卡http://www.hobbytronics.co.uk/4gb-microsd?keyword = 。。.
如果LED在5V電壓下需要10 ma,則該電阻器為R = V/I = 5/0.010 = 500歐姆
8)塑料盒
我用15cm * 10cm * 5 cm,如果可以的話,它會變小
9)5.5mm Arduino直流電源插頭http://www.hobbytronics.co.uk/cables-connectors/dc.。。
9)單聲道3.5 mm唱頭插座
10)面板開關(guān)(開/關(guān)額定適用于5v 500mA)
12)小橡膠腳墊(需要8個)
13)內(nèi)徑為3.3mm的10mm尼龍墊片http://www.hobbytronics.co.uk/hardware/spacers-was 。。.
這些完全適合LCD按鈕以進行擴展。使用模型制作者超級膠水進行附著。
14)2-2.5mm帶螺母和墊圈的螺栓(需要3個)用作Arduino的支撐柱。一根窄螺釘,長2厘米。
15)小長5毫米的定位銷。小螺絲固定。 3-4小塊塑料洗滌液。
16)硬木以適合盒子的底部。木材使兩個底座支撐盒子的寬度。
17)電池-我使用了2節(jié)500 mAH LIPO。為此,您將需要 LIPO充電器 。
18)引線以匹配電池端子類型。
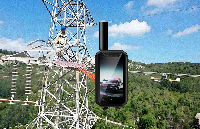
19)可選如果您計劃添加外部arial,則UFA到SMA arial適配器電纜。
gps非常敏感-我還沒有買過arial。
步驟2 :入門

閱讀有關(guān)最終gps的adafruit文章https://learn.adafruit.com/adafruit-ultimate-gps/
另一篇有用的文章https://learn.adafruit.com/adafruit -shield-compat 。。.
。
將4個小的橡膠腳安裝到Arduino Mega的基座上:
這將提供穩(wěn)定的安裝表面。
避免安裝孔。
。
將可堆疊連接器安裝到gps板上:
確保使用GPS板中最外面的孔。檢查所有東西的配合情況!
我將板子部分插入了arduino,然后將板子上下顛倒地焊接在每個部分的2個端針上。
必須小心不會使電路板過熱。其余的引腳都焊接好了,然后拆下了電路板。
使用一段直的單行接頭連接器,然后拉出引腳以制成隔離條。將隔板安裝到GPS板上現(xiàn)在可堆疊連接器的4個部分中的每個部分上。
假設(shè)您使用的是Mega,請將軌道切成7、8和10針 》如圖所示。用鋒利的手術(shù)刀仔細切開。
。
安裝GPS電池和SD卡:
插入電池,注意極性。
將預格式化的SD卡小心地滑入插槽,直至其固定到位。觀察正確的對齊方式。
。
將3條導線連接到CCS,TX和RX :
我將導線彎曲備用的六向可堆疊連接器可旋轉(zhuǎn)90度,并使用CSS/TX/RX將其焊接到該行中。
這使我可以根據(jù)需要輕松地移除引線。
直接導致。
。
添加雙色LED:
檢查雙色LED的數(shù)據(jù)表并選擇一個電阻提供正確的電流。確定線索的方向。 LED應該是共陰極型。
暫時將LCD板安裝到GPS板上-小心地匹配孔!
使用尖頭鼻子鉗作為支撐來彎曲引線,以實現(xiàn)草圖中的輪廓。
led應該將LCD屏幕的末端清除10-12mm,并在其上方到達4-5mm,以便從外殼中出來。
p》
建立引線輪廓和長度后,卸下LCD。
將LED,電阻器和3根導線焊接到GPS板的底面。
紅色引到引腳2,綠色引到引腳3,陰極通過電阻0V。
。
將GPS板插入Arduino Mega:
如果您使用的是Sainsmart,則每側(cè)都有2條導線在插座孔中-組裝前,我將其略微向外彎曲,并將熱縮管放在裸露的引腳上。
將3根引線連接至Arduino- RX至TX1,TX至RX1,SSC至引腳32(可以
將GPS開關(guān)設(shè)置為“ SOFT SERIAL”。
。
將LCD板插入GPS板:
在LCD板上的按鈕旁邊找到安裝孔。小心地切一塊5mm的木銷,以將LCD的按鈕端支撐在安裝孔下方。它應該放在長凳上。按下按鈕時,這將使LCD停止搖擺。
在插槽中放入足夠的塑料墊圈以防止其閉合。將木桿擰入到位-使用良好的導向孔。如有必要,用砂紙/洗滌液調(diào)節(jié)高度。桿只應清除對Mega電源插座的訪問。
步驟3:制作盒子

1)切一塊硬質(zhì)板以適合盒子的底部-至少允許移動2mm
2)將Mega放到底座上-小心地放置,以使距LCD屏幕的左邊緣到盒子左側(cè)的距離為15mm,距LCD的前邊緣到PC正面的距離為35mm。框。標記并鉆一個安裝孔。 ink孔底座的底部。從底部安裝2mm的螺母和螺栓。
重新放置Arduino并安裝第二個孔-確保LCD與底座平行。
添加第三個螺母和螺栓。最終的安裝座是從頂部到右下安裝孔的螺釘。
剪切并適當?shù)毓潭ò惭b螺栓的長度。
3)將mega放在其安裝座上。仔細測量盒子頂部和LCD頂部之間的高度。檢查蓋子下側(cè)相對于LCD頂部的位置。
制作兩個矩形滑道正確的深度以將LCD頂部放置 1-2 mm 蓋子底部下方。
右手滑道必須位于螺絲孔的中心,以確保右下安裝位置。
穿過底座頂部,以固定滑道。避開安裝孔。
再次檢查LCD相對于蓋子的高度-不要蓋上蓋子-LED會彎曲!
4)鉆出螺絲孔插入右手的滑槽中。在螺絲孔周圍稍微埋入孔。切下一個10mm的尼龍墊片,以支撐電路板的右下部分。
5)將Mega的LCD平行于盒子的正面放置。使用沉頭螺釘將底座從盒子的外部安裝到每個流道中。
6)測量LED的位置。在蓋子上鉆一個小導向孔。檢查LED的位置,并按照LED的間隙尺寸開孔。
7)測量并切掉LCD屏幕的孔-比LCD屏幕支架的外部尺寸小1-2 mm。
8)拆下底座,并切成兩條條狀的瓦楞紙板,以匹配流道的底座。將它們粘到跑步者身上。然后在卡上放2個孔,以匹配螺絲孔。重新安裝底座。調(diào)整螺釘壓力,直到蓋子完全適合LCD頂部(啊!1-2毫米的間隙!)
9)鉆五個按鈕孔:
小心地在按鈕頂部涂上白色尖頂。
測量左下按鈕的位置。在蓋子上鉆一個導向孔。檢查孔是否對準-蓋上蓋子,從上方照亮火炬-白色按鈕頂部應顯示。
如有需要,用圓形針頭銼調(diào)整導向孔-重新檢查位置并鉆出孔到10mm尼龍墊片的間隙直徑。
重復4個以上的按鈕。
10)在LCD板上添加“擴展件”按鈕:
保護工作表面。
準備一些紙布。移開所有分散注意力的孩子。
檢查10毫米尼龍墊片是否緊貼在按鈕上。如有必要,擴大孔,直到實現(xiàn)緊密的過盈配合。您將需要無線電控制模型供應商的無線電控制模型制造商氰基丙烯酸酯膠(中等至稀薄的粘度)和一些精細的膠嘴。垂直安裝第一個墊片。然后使用最細的噴嘴在管底部內(nèi)側(cè)涂一點膠。倒置LCD板以防止?jié)B入交換機。等待一分鐘,然后按照相同的步驟操作其他按鈕。將液晶顯示屏倒置30分鐘以使膠水固化。在此期間,卸下并丟棄細噴嘴。
檢查盒子的蓋子是否合適!
11)鉆孔并安裝充電器插座,開關(guān)保險絲和Arial導線(如果需要)
12)從5.5mm直流電源插頭上卸下塑料應力消除盒上的螺釘。將一對導線焊接到端子的紅色-尖端。 在加熱前使用收縮管對電線進行絕緣和彎曲處理。
13 按照包裝盒的內(nèi)部視圖所示連接電線。
唱頭插座尖端應連接到電池正極。
唱頭插座上的開關(guān)連接為電路的其余部分提供了電源。
14)在USB插頭并重新組裝Arduino。
如果需要,將UFL連接包括到導線上-小心輕放。
輕輕擰緊最終的板上安裝螺釘。
仔細檢查接線。我不接受對此內(nèi)容或本文中包含的任何其他功能承擔責任!
15)連接電池并使用維可牢尼龍搭扣(strongcrock)
將4個小的橡膠腳固定在盒子的底部,即可完成。
步驟4:庫和軟件
您將需要安裝兩個庫:
1)下載并安裝adafruit gps庫https://github.com/adafruit/Adafruit-GPS-Library
2)安裝adafruit sd卡庫:
除非從Arduino libraries文件夾中刪除了任何現(xiàn)有的sd庫,否則默認安裝將無法進行。一定要這樣做,然后從https://github.com/adafruit/SD
安裝該庫,或者保留現(xiàn)有的sd庫并下載 SDADA.zip 已修改為接受對SDADA的呼叫。將其安裝在 Arduino libraries SDADA 中,這樣您仍然可以使用其他SD庫
如果您使用的是SDADA版本,則該文件將包含在gps2.ino草圖中。該行:
#include SDADA.h
如果沒有,請注釋掉該行并使用:#include SD.h
這兩個庫都提供了示例可以使用GPS進行測試。
。
默認情況下,以下庫應已安裝:
LiquidCrystal.h
SoftwareSerial。 h
SPI.h
avr/sleep.h
。
下載gps2.zip
將gps2.ino和gps_card.ino保存到Arduino素描目錄中自己的文件夾中。
打開gps2.ino
Alter以下行:
#include SDADA.h
到#include SD.h(如果您不使用我修改的SD庫)
此更改也適用于gps_card.ino
檢查LCD的設(shè)置:
在配置部分:
boolean sain = true;//如果使用sainsmart LCD屏蔽,則設(shè)置為true;對于其他屏蔽,例如DFROBOT屏蔽,則設(shè)置為false。
根據(jù)您選擇的LCD設(shè)置sain變量。
請注意,上述兩個LCD板均使用引腳10設(shè)置背光。向上按鈕可關(guān)閉背光,從而節(jié)省電池電量。
。
gps2.ino現(xiàn)在應該運行!
。
按鈕:
a)選擇更改LCD第一行上顯示的功能:
位置和海拔高度(十進制經(jīng)度和緯度,隨高度交替變化)
位置(十進制經(jīng)度和緯度)
軍械測量東,北向位置坐標加上操作系統(tǒng)工作表編號
海拔高度
距原點的運行距離
距原點的距離
時間
b)左切換公制/英制。
c)右切換日志記錄:
L顯示在登錄時右下角
An!此位置的標記表示沒有sd卡,或者卡不可用
d)向上切換回顯示。 (有用的節(jié)能器。)
e)向下將距離重置為零:
這會將當前位置設(shè)置為范圍的原點。 (烏鴉飛到原點的距離。)
。
要激活按鈕,請按住它直到LED停止閃爍。然后釋放。
步驟5:在Gps2.ino中使用SD卡

設(shè)置sd卡:
需要將默認芯片選擇引腳和實際chipSelect引腳設(shè)置為輸出。
SD卡可以通過一個begin語句訪問該語句,該語句包括gps板上卡所使用的引腳。
卡速度設(shè)置為SPI_Full_SPEED。
如果發(fā)生錯誤,指示燈會閃爍。
如果在配置中將debug設(shè)置為true,則還會發(fā)送串行監(jiān)視器消息。
如果卡初始化正常,則變量hascard為設(shè)置為true。
。
//確保即使不使用默認芯片選擇引腳也設(shè)置為
//輸出:
pinMode(SS,OUTPUT);//默認的mega select引腳
pinMode(chipSelect,OUTPUT);
digitalWrite(chipSelect,LOW);
//查看卡是否存在以及可以初始化:
if(!SD.begin(chipSelect,11,12,13)){
if(debug)Serial.println(F(“ Card init。failed !“))
error(1);
} else {
if(!card.init(SPI_FULL_SPEED,chipSelect,11,12,13 )){
error(2);
if(debug){
Serial.println(F(“初始化失敗。檢查事項:”) );
Serial.println(F(“ *是否插入卡?”));
Serial.println(F(“ *您的接線正確嗎?”)) ;
Serial.println(F(“ *您是否更改了chipSelect引腳以匹配您的屏蔽或模塊?”));
}
}其他{
hascard = true;
if(debug)Serial.println(F(“ Card init。成功”));
}
}
選擇要記錄的SD文件:
按下右手按鈕會調(diào)用子例程openfile
這將檢查gps文件夾以查找未使用的文件名
如果找到文件,則將foundit設(shè)置為true。
如果(!hascard){return;}//,則從GPSLOGnn.TXT開始,其中nn = 0到99。如果卡不存在或不可用,則不要繼續(xù)
字節(jié)i;
字符文件名[18];
strcpy(filename,“/gps/GPSLOG00.TXT“);
文件名[17] = char(0);
布爾值foundit = false;
為(i = 0;我《100; i ++){
文件名[11] =‘0’+ i/10;
文件名[12] =‘0’+ i%10;
if(!SD.exists(filename)){
foundit = true; break;
}
}
如果所有文件名都在使用中,則Foundit為false,并且詢問用戶是否應刪除前50個。如果不能接受,則將hascard設(shè)置為false,以便不再嘗試登錄。
if(!foundit){
int thisbutton = -1;
lcd.clear();
lcd.print(“ Dir full-Erase?”);
lcd.setCursor(0,1);
lcd.print(“Sel:Ok Right:No“);
執(zhí)行{
此按鈕= read_LCD_buttons();
} while(thisbutton == btnNONE);
lcd.clear();
if(thisbutton == btnSELECT){
lcd.print(“正在刪除” );
for(i = 0; i 《50; i ++){
文件名[11] =‘0’+ i/10;
文件名[12] =‘0’+ i%10;
如果(SD.exists(文件名))SD.remove(文件名);
}
i = 0;
文件名[11] =‘0’+ i/10;
文件名[12] =‘0’+ i%10;
}其他{
error(4);
hascard = false;
return;
}
}
可以打開文件:
發(fā)生錯誤時,將輸出串行信息,并通過狀態(tài)指示燈指示錯誤代碼。
如果成功,則輸出文件的第一行。這是列標題。
請注意使用logfile.flush()。
logfile = SD.open(filename,F(xiàn)ILE_WRITE);
if(!logfile){
if(調(diào)試){
Serial.print(“無法創(chuàng)建”);
Serial.println(文件名);
}
error(3);
hascard = false;
}其他{
logging = true;
myfile =文件名;
logfile.println(pad(”Time“,13)+ lpad(” Date“,9)+ lpad(” Longitude“,10)
+ lpad(” Latitude“,10)+ lpad (“ Altitude”,9)+“ m” + lpad(“ Geoid”,9)+“ m” + lpad(“ Speed”,7)+“ mph mph”);
logfile.flush ();
if(debug){Serial.print(“ Writing to”); Serial.println(filename);}
}
。
lpad 和 pad 是文本填充功能:
。
字符串lpad(字符串temp,字節(jié)L){
byte mylen = temp.length();
if(mylen》(L-1))return temp.substring(0,L-1);
for(字節(jié)i = 0; i 《(L-mylen); i ++)temp =“” + temp;
返回溫度;
}
String pad(String temp,byte L){
byt e mylen = temp.length();
if(mylen》(L-1))return
temp.substring(0,L-1);
for(字節(jié)i = 0; i 《(L-mylen); i ++)temp = temp +“”;
返回溫度;
}
。
寫入文件:
如果正在記錄日志,主循環(huán)將讀取gps并將其值輸出到文件。 (“ L”顯示在LCD屏幕的右下方。)
。
將值格式化為固定寬度的列。
。
函數(shù)dtostrf(float,w,dp,buf)是一個Arduino庫函數(shù),它接受一個float變量并將其轉(zhuǎn)換為寬度為w且?guī)p小數(shù)點的字符串。 buf是一個char緩沖區(qū),必須足夠大才能處理轉(zhuǎn)換。
我用“ char buf [20];”定義了buf。
在繼續(xù)之前先清空文件。
。
ogfile.print(pad(mytime,13));//包括毫秒數(shù)
logfile.print(pad(myyear,9));
logfile.print(dtostrf(longitude,10,5,buf));
logfile.print(dtostrf(latitude,10,5,buf));
logfile.print(dtostrf(altitudem,9,1,buf)); logfile.print(“ m”);
logfile.print(dtostrf(大地水準面,9,1,BUF)); logfile.print(“ m”);
logfile.print(dtostrf(speedmph,7,2,buf)); logfile.print(“ mph”);
logfile.print(dtostrf(heading,6,1,buf)); logfile.println(“ deg”);
logfile.flush();
。
關(guān)閉文件:
如果該卡不可用,請返回,否則在關(guān)閉文件之前將所有剩余的輸出刷新到卡上。
void closefile(){
if(!hascard) return;
logfile.flush();
logfile.close();
logging = false;
if(debug) Serial.println(“ File” + myfile +“ closed”);
}
步驟6:讀取Gps
在腳本頭中設(shè)置庫:
#include Adafruit_GPS.h
#include SoftwareSerial。 h
HardwareSerial mySerial = Serial1;
Adafruit_GPS GPS(&mySerial);
在啟動時選擇gps:
pinMode (chipSelect,OUTPUT);
digitalWrite(chipSelect,LOW);
GPS.begin(9600);
//設(shè)置更新速率//1Hz正常工作并留出時間來執(zhí)行記錄GPS.sendCommand(PMTK_SET_NMEA_UPDATE_1HZ);//或者0.1Hz,5Hz和10Hz更新頻率
//RMC(建議最小值):GGA(固定數(shù)據(jù)),包括海拔GPS.sendCommand(PMTK_SET_NMEA_OUTPUT_RMCGGA);
//如果固件允許,則關(guān)閉天線狀態(tài)更新
GPS.sendCommand(PGCMD_NOANTENNA);
。
通過中斷讀取GPS
請注意,實際上是在Adafruit_GPS.h庫代碼中而不是在此中斷例程中解釋數(shù)據(jù)。
//如果GPSECHO = true,則在Timer0上中斷1毫秒以促進gps數(shù)據(jù)回波-
useInterrupt(true);//如果為true,則通過中斷讀取輸入。
。
就是這樣!循環(huán)讀取:
GPS.newNMEAreceived()如果到達了新的GPS信息,則設(shè)置為true。
GPS.parse(stringptr),如果設(shè)置為true,則設(shè)置為true已成功從原始GPS文本字符串中分離(解析)。
如果GPS報告其位置有固定值,則GPS.fix設(shè)置為true。
如果gps具有修復程序提取位置,高度,速度,方位角,時間,大地水準面高度,衛(wèi)星和hdop的值。
以十進制經(jīng)度和緯度返回位置,以節(jié)為單位返回速度,以米為單位返回距離。
。
if(GPS.newNMEAreceived()){
char * stringptr = GPS.lastNMEA();
。
if( !GPS.parse(stringptr))返回;//如果為假
。
if(GPS.fix){
digitalWrite(ledGreen,HIGH);
fixed = true;//記住狀態(tài),以防它在過程中發(fā)生變化
mymillis = GPS.milliseconds;
myseconds = GPS.seconds;
mytime = String(GPS.hour )+“:” + String(GPS.minute)+“:”;
logtime = mytime;
logtime + = String(int(myseconds + mymillis/1000 + 0.1) );//如果在0.1 S之內(nèi)取整
mytime + = String(myseconds + mymillis/1000);//完整的召回時間
myyear = String(GPS.day)+“/” + String(GPS.month)+“/”;
lcdyear = myyear; theyear = String(GPS.year);
myyear + = theyear;
mylen = theyear.length();
lcdyear + = theyear.substring( mylen-1,mylen);//僅適合以下位數(shù)的數(shù)字
緯度= GPS.latitudeDegrees;
經(jīng)度= GPS.longitudeDegrees;
altitudem = GPS.altitude;
altitudef = Heightm * fconvert;
速度結(jié)= GPS.speed;
speedmph =速度結(jié)* 1.15077945;
speedkph =速度結(jié)* 1.85200;
heading = GPS.angle;
satellites = GPS.satellites;
geoid = GPS.geoidheight;
hdop = 7-int (GPS.HDOP + 0.5);
步驟7:英國國家網(wǎng)格位置和行進距離
1)將十進制經(jīng)度和緯度的位置轉(zhuǎn)換為英國軍械測量儀單位的詳細信息,請參見軍械測量提供的pdf文件:
http://www.ordnancesurvey.co.uk/docs/support/guide 。。.
第40頁不會使人眼花,亂,但確實提供了必要的數(shù)學。
我的子程序空彈藥(float phi,float lamda)實現(xiàn)了計算。
對于Easti,返回的值精確到+-0.1 ng和+-0.02(向北)。精度不足的原因是Arduino浮點運算的精度有限。 Arduino僅支持“ 6-7”個有效小數(shù)位。
。
可以從經(jīng)度和緯度值的最高有效位中提取兵器測量圖紙編號。函數(shù)字符串NE2NGR(float&east,float&north)執(zhí)行提取,并歸功于:
Alex http://www.codeproject.com/Articles/13577/GPS-Der 。。.
。
2)可以通過兩個緯度和經(jīng)度值的差來計算出行進距離。
對于小的差異,估計值必須是可疑的由于GPS定位固有的精度不足。 Arduino浮點小數(shù)位支持的限制也影響整體精度。盡管如此,累積的行進距離估計還是合理的。到原點的范圍非常準確,因為它僅涉及兩個位置之間的差異。
可以使用下部按鈕重新設(shè)置距離計算的原點。
在低速時我在三秒鐘的時間內(nèi)對位置進行了采樣,以增加位置差異大于GPS定位中不確定性距離的可能性。以較高的速度,我減少了采樣位置之間的時間。此時間由變量dlimit控制。
子例程float distance_between(float lat1,float long1,float lat2,float long2)之間返回該距離。
原始工作被歸功于Maarten Lamers。
步驟8:使用Gps_card.ino

此草圖假定您已連接串行監(jiān)視器,最好是具有復制文本功能的串行監(jiān)視器。
不幸的是,默認的Arduino串行監(jiān)視器似乎不提供此功能。 (我寫了我自己的文章。)
Roger Meier的CoolTerm完成了http://freeware.the-meiers.org/
。
如果使用默認的SD庫設(shè)置,請進行以下更改:
#include SD.h代替#include SDADA.h
。
設(shè)置將串行監(jiān)視器設(shè)置為115200。
。
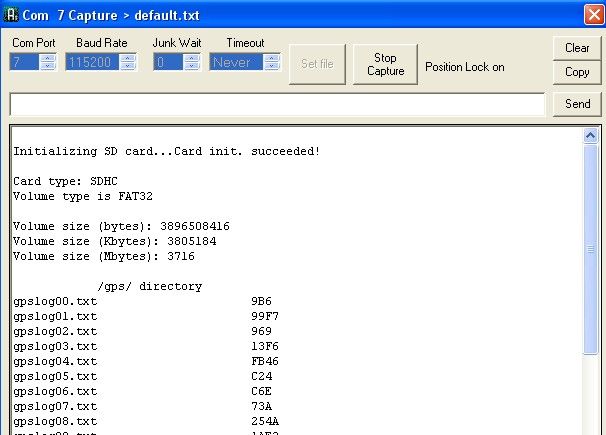
運行草圖時,它將測試SD卡并顯示卡的大小和gps目錄的詳細信息。/strong》
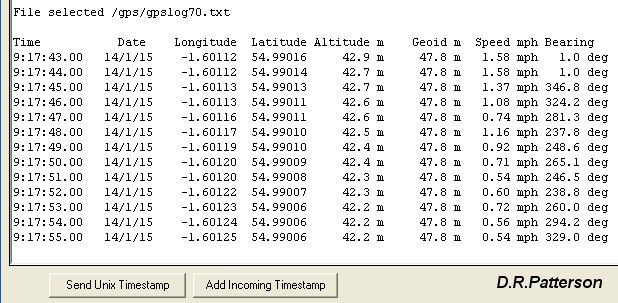
鍵入文件名,它將打開并顯示。
可以使用 #delete刪除單個文件文件名
數(shù)據(jù)以固定寬度的列顯示,并帶有空格分隔符。
假設(shè)您可以復制文本,使用excel中的值非常簡單。
第9步:規(guī)格
LCD顯示屏有一個可選的頂行和一個下部行,由:
衛(wèi)星數(shù)
速度
HDOP-水平位置稀釋
軸承
記錄狀態(tài):
“ L”-記錄
“”-未記錄
“!” -SD卡不存在或不可用
頂行:
經(jīng)度和緯度位置,以度為單位
經(jīng)度(以度為單位)
英國國家地理參考
海拔
從原點出發(fā)的距離(可以重置原點)
原點距
時間
注意:
公制或英制的LCD值。
對于LCD顯示屏,速度《=截止(0.65)mph的速度顯示為0
衛(wèi)星數(shù)目在左下角顯示為豎線。該欄已滿后,可以顯示的最大數(shù)字為8。
HDOP顯示在下部中央移動欄中。 HDOP表示觀察到的衛(wèi)星的擴展-擴展的擴展提高了準確性,HDOP數(shù)量減少了。 HDOP值1很好!
HDOP精度《0.5用實線表示。
HDOP值為0.5到1.5(1)用7條表示。
HDOP為6時顯示為1條。
HDOP》 6時沒有顯示條。
按鈕:
a)選擇更改液晶屏第一行
高度/位置(經(jīng)度和緯度)
位置(經(jīng)度和緯度)
位置在軍械測量中,x,y坐標
高度
時間
b)左切換公制/英制
c)右切換日志記錄
d)向上切換回顯示(有用的節(jié)電器)
e)向下將距離重置為零,并將當前位置設(shè)置為范圍的原點(烏鴉將距離原點飛出) )
要激活按鈕,請按住直到LED停止閃爍。然后釋放。
1秒間隔閃爍紅色-不修復
1秒間隔閃爍綠色-修復
四個短綠色閃爍-已按下按鈕
1個紅色閃爍重復了5次-錯誤1:SD卡初始化失敗
2個紅色閃爍重復了5次-錯誤2:SD卡全速初始化失敗
3次紅色閃爍重復5次-錯誤3:無法創(chuàng)建日志文件
4次紅色閃爍重復5次-錯誤4:日志文件夾中有100個文件,并且不會刪除
累積距離估算值將在多個一秒鐘的間隔位置產(chǎn)生累積舍入誤差。
請注意,“軍械”測量值的精度是有限的-arduino浮點值保留6-7個有效的小數(shù)位。轉(zhuǎn)換公式涉及許多計算,并且舍入誤差具有累積影響。最終,精度受返回的sin,cos和tan值的限制。
東移值似乎精確到+-0.1
北移到+-0.02
通過比較,經(jīng)度/緯度值似乎精確到+-0.00001
將ufl連接到SMA引線不會影響性能。 GPS芯片只能識別活動的ariar(1575.42MHz)。
-
led
+關(guān)注
關(guān)注
242文章
23847瀏覽量
674166 -
鍵盤
+關(guān)注
關(guān)注
4文章
866瀏覽量
40695 -
Arduino
+關(guān)注
關(guān)注
190文章
6498瀏覽量
192187
發(fā)布評論請先 登錄
從人工記錄到智能巡檢:云翎智能單北斗記錄儀如何重塑電力巡檢
MT8390(Genio 700)_聯(lián)發(fā)科MTK8390核心板參數(shù)

從“事后追溯”到“事前預警”:云翎智能巡檢記錄儀風險管控升級

MTK8766(MT8766)MTK安卓核心板_聯(lián)發(fā)科核心板方案

6050 Ultimate Channel Strip介紹

6020 Ultimate EQ說明

MT6765安卓核心板參數(shù)_聯(lián)發(fā)科MTK模塊開發(fā)

MTK6761(MT6761)安卓核心板_聯(lián)發(fā)科MTK核心板模塊方案

安卓開發(fā)板_MTK開發(fā)板Demo板方案

MT8781_MTK8781_聯(lián)發(fā)科MTK安卓核心板模塊方案

揭秘PCB電路板抄板全過程:從元件記錄到完美復制
杭州中科微AT6558R北斗定位芯片 GPS雙模定位模塊芯片
從記錄到管理:單北斗工作記錄儀如何優(yōu)化工作流程






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論