") 簡易Arduino機械臂DIY圖解
簡易Arduino機械臂DIY圖解
步驟1:所需材料
此項目的工具和材料非常便宜,并且運行的資金不應超過$ 20 USD。如果周圍有一些伺服器,那么您很幸運。我還應該指出,如果您擁有更強大的伺服器,可以使用3而不是4來代替我。這些是我購買零件的地方,請在購買前查看其他網(wǎng)站的優(yōu)惠。
-冰棍棍$ 3.65 [如果您想替代更適合的材料]
-Micro Servos x6 $ 16 [請嘗試尋找交易]
-電位器x3 $ 2.74 [同樣,您要在其中放置一些]
-跳線或只是普通線
我使用了Yourduino,因為它帶有許多端口,可讓您一次插入多個伺服器。我將限制保持在大約4,以免燒壞電路板。
如果您使用常規(guī)的Arduino,則將需要一個電動機護罩,以支持4個電動機。
-膠槍,錘子和釘子,用來固定手臂的底座控制器的外殼和外殼
*如果要使控制器電路更堅固,更簡單,則可選的pcb也可以。
步驟2:步驟2:組裝基地和前臂
好吧,找到一塊木板或材料來支撐整個手臂結(jié)構(gòu)的重量。找到材料后,我發(fā)現(xiàn)最好將伺服器粘上,然后將托架釘在木頭上,這樣可以得到更多的支撐和重量分布。做這樣小的事情會使您的微型伺服系統(tǒng)變得強大2倍[我沒有做數(shù)學]。然后將接下來的兩個伺服器熱粘合到基本伺服器的頂部。確保它們面對相反的方向但平行,并測試伺服器是否可以平行移動。將可能會壓住伺服器的材料熱粘。
接下來,您必須布置手臂結(jié)構(gòu)所需的框架,然后將伺服器的齒輪熱粘到冰棒上,使其粘在冰棍上將控制。我沒有足夠的電動機來增加肘部支撐,所以使框架具有廣闊的前景。因此,通過這樣設置,我為手臂創(chuàng)建了更大的范圍。
請確保肩部伺服器的連接正確粘合,并且彼此之間的距離不遠。最后添加下一個水平框架支撐,以確保在使用中電動機一起移動。
步驟3:步驟3:組裝爪子
首先必須涂上頂部伺服電機,并用膠水將其固定到位。確保牢固的結(jié)合力會讓您討厭機器人在測試過程中破裂。同樣,在此時,請確保添加只有一端的特殊齒輪。這就是我們用來控制爪子的東西。
爪子
從玩具制造工具包中發(fā)現(xiàn)了我的爪子。我什至不認為這應該是爪子。您可以選擇購買自己的機械爪,也可以四處尋找家用物品并利用自己的創(chuàng)造力來制作。那正是我所做的。也許您不想要爪子,也許您想要一個可以給您高五,拳頭顛簸的機器人,或者只是擁有一個平臺,以便您可以在其上放置物料。它甚至可能是焊接的幫手。
第4步:第4步:將所有內(nèi)容連接起來的時間
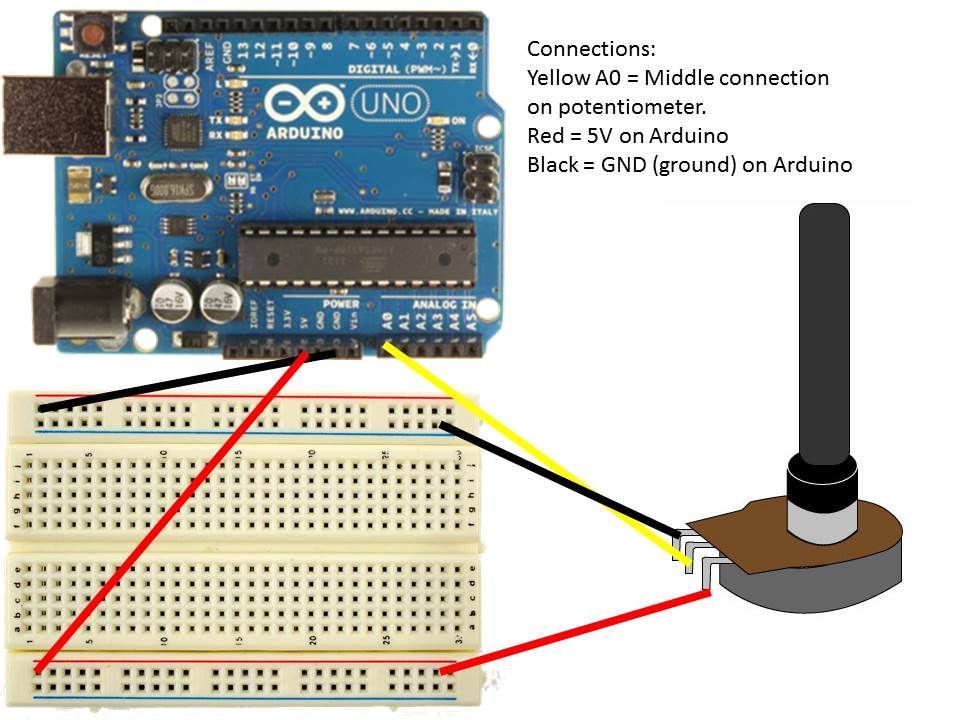
好,現(xiàn)在我們將創(chuàng)建允許機器人手臂四處走動并做事的控制器。我可能會添加一些很酷的東西。第一個圖像顯示了電位計的接線,因此務必遵循以下格式,這一點非常重要。我所做的只是將面包板的5伏電壓和接地電壓直接插入面包板的端子,因為顯然3個電位器引腳不能插入一個5伏孔中。
首先,我們從將電位器[Pots]插入其應有的端子開始。
將每個Pot的中間從右到左連接到A0,A1,A2。
將Arduino的GND和5伏電壓連接到面包板上,然后將鍋gnd連接到gnd行中。
將鍋的正極連接到右邊進入5伏特行。
最后插入伺服器。
底基移到3
左肩移到5
右肩移到6
爪移到11/li》
應該的,再次測試您的伺服器以確保一切正常
步驟5: 5:代碼
好的,因此代碼已附加并發(fā)布在下面。該代碼的前半部分標識了控制手臂所需的各種材料。代碼的下半部分告訴arduino,當您將鍋向某個方向旋轉(zhuǎn)時該怎么做。我還應該指出,我能夠欺騙代碼以允許兩個伺服器同時運行,而不是一次運行。這允許肩膀一起移動。
/*
July 14th, 2014
Simple robotic arm that is controlled by three pots.
*/
#include
Servo base; // Tells the arduino what servos we are going to
Servo left; // use. I name them by they function or location.
Servo right;
Servo claw;
int potpin = 0; //Tells the arduino the locations of the pots
int potpin2 = 1;
int potpin3 = 2;
int val; //Tells the arduino what variable to use to store
int val2; // the position when turned.
int val3;
void setup()
{
base.attach(3);
left.attach(5); //Tells the arduino where the servos are plugged
right.attach(6); // in.
claw.attach(11);
}
void loop(){
{
val = analogRead(potpin); //tells arduino which pot controlls
val = map(val, 0, 1023, 0, 179); //current servo, and then maps
base.write(val); //the dial the pot is on to move the servo
delay(15); //waits for the servo to move
}{
val2 = analogRead(potpin2);
val2 = map(val2, 0, 1023, 0, 179);
left.write(val2);
delay(15);
{
val2 = analogRead(potpin2);
val2 = map(val2, 0, 1023, 0, 179);
right.write(val2);
delay(15);
}
{
val3 = analogRead(potpin3);
val3 = map(val3, 0, 1023, 0, 179);
claw.write(val3);
delay(15);
}
}
}
步驟6:步驟6:視頻演示和結(jié)尾注釋
好的,就這樣。這再次是一個原型項目,并且是一個工作演示,以展示該產(chǎn)品可能具有的全部潛力。我提供了一個視頻演示,如果你們花時間訂閱我的YouTube頻道,我將不勝感激,它將很快推出許多新視頻和周末項目。 “我的頻道”
我計劃最終為該機械臂創(chuàng)建3D模型,并在爪子和馬達上進行擴展,以便實際上可以成為功能齊全的機械臂。
第7步:疑難解答
我聽到的只是嗡嗡聲!
快速拔下電動機或電源。這意味著負載對于電動機來說太重,或者電動機已卡在其當前位置。請用一只手輕輕地嘗試朝任何方向旋轉(zhuǎn)電動機。
它不斷下降!
然后,要么上層太重,要么手臂的底部沒有得到足夠的加固。
-
Arduino
+關(guān)注
關(guān)注
188文章
6485瀏覽量
189678 -
機械臂
+關(guān)注
關(guān)注
13文章
540瀏覽量
25124
發(fā)布評論請先 登錄
相關(guān)推薦
海康威視推出大模型機械臂防碰撞相機
如何使用PLC控制myCobot 320機械臂

使用myCobot 280機械臂結(jié)合ROS2系統(tǒng)搭建機械分揀站

深度解析!RK3568 加持機械臂是如何實現(xiàn)顏色識別與抓取的?

RK3568國產(chǎn)實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!
“雙保險”鎖緊機制:YM28系列連接器為機械臂提供高牢靠的大電流連接

機械臂的高效運作,連接器起關(guān)鍵作用
工業(yè)產(chǎn)線機械臂數(shù)字孿生 流程工業(yè)應用

【原創(chuàng)】 drawbot 平面機械臂scara寫字畫畫機器人DIY教程貼
OrangePi AIpro應用:機械臂應用開發(fā)指南

工業(yè)機器人和機械臂的設計、功能和應用有哪些區(qū)別?
奧比中光推出2.0版大模型機械臂
大象機器人開源協(xié)作機械臂機械臂接入GPT4o大模型!

國產(chǎn)Cortex-A55人工智能教學實驗箱_基于Python機械臂跳舞實驗案例分享
基于六維力傳感器的機械臂自動裝配應用

- 設計技術(shù)
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術(shù)
- 測量儀表
- 嵌入式技術(shù)
- 制造/封裝
- 模擬技術(shù)
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設計
- 存儲技術(shù)
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業(yè)應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設備
- 機器人
- 安全設備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 華秋
- 關(guān)于我們
- 投資關(guān)系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:[email protected]
- 內(nèi)容合作
- 黃晶晶:[email protected]
- 內(nèi)容合作(海外)
- 張迎輝:[email protected]
- 供應鏈服務 PCB/IC/PCBA
- 江良華:[email protected]
- 投資合作
- 曾海銀:[email protected]
- 社區(qū)合作
- 劉勇:[email protected]
-
關(guān)注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論