") UWB室內(nèi)定位系統(tǒng)的三種定位算法_95power
UWB室內(nèi)定位系統(tǒng)的三種定位算法_95power
UWB定位屬于高精度室內(nèi)定位的一種,UWB定位常用的有三種定位算法,包括TWR定位算法、TOA定位算法和TDOA定位算法。
(1)TWR定位算法
TWR定位算法的全稱是Two Way Ranging,是一種雙向測距定位算法。
(2)TOA定位算法
TOA,全稱是Time of Arrival,通過測量被測UWB定位標簽(B)與已知位置基站(P1,P2,P3)間的報文傳輸時間,計算出距離;采用三個以上的距離值,通過三角定位,計算出被測標簽的位置。不需要已知位置基站間時鐘同步。

基站收到標簽的多種信息;
服務(wù)器根據(jù)上傳的信息進行時鐘分配;
標簽根據(jù)分配的時間同基站進行測距定位。基站進行測距定位。

4個已知坐標的基站為一組,實現(xiàn)三維定位;
標簽進入定位區(qū)域后,按照分配的時間和順序,依次與基站進行測距;
距離信息通過有線/無線網(wǎng)絡(luò)上傳到服務(wù)器,實現(xiàn)位置實時跟蹤。
(3)TDOA定位算法
TDOA,全稱是Time Difference of Arrival,通過測量被測標簽(B)與已知位置基站(P1,P2,P3)間的報文傳輸時間差,計算出距離差;計算出被測標簽的位置。需要已知位置基站間時鐘同步。

UWB定位的三種定位算法的對比如下圖:

通過以上信息可以知,TDOA定位算法通過UWB信號進行基站的同步,定位精度高,UWB標簽功耗低,且標簽容量可以達到上千個,數(shù)據(jù)延時也非常低,是UWB定位系統(tǒng)方案的首選定位算法。
以上就是UWB定位的三種常用定位算法簡單介紹和對比。
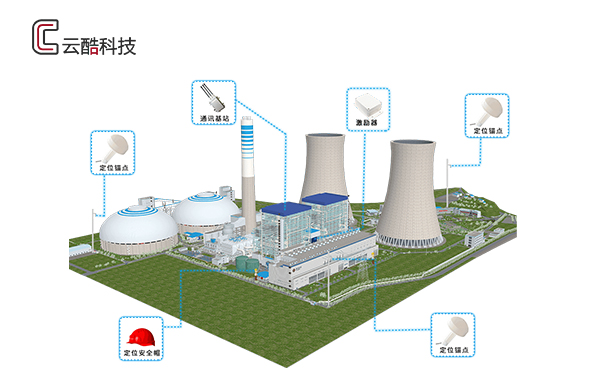
深圳市微能信息(95power)的UWB定位系統(tǒng)方案和UWB基站就是基于TDOA定位算法,常用于隧道、監(jiān)獄看守所、養(yǎng)老院、電廠變電站等場合的高精度人員定位系統(tǒng),根據(jù)定位場景,誤差一般在10厘米-30厘米。
-
室內(nèi)定位
+關(guān)注
關(guān)注
30文章
307瀏覽量
36978
發(fā)布評論請先 登錄
UWB 定位測距
精準到厘米!安信可UWB定位模組,讓室內(nèi)管理更“聰明”
低成本、高精度:巍泰技術(shù)UWB信標定位系統(tǒng),為室內(nèi)定位降本增效

智慧化工園區(qū)高精度室內(nèi)定位解決方案
如何才能實現(xiàn)更精準的室內(nèi)定位

三種融合人員定位系統(tǒng)在煤礦的應用
藍牙人員定位、UWB人員定位、RFID定位技術(shù)應該怎么選
常見室內(nèi)定位技術(shù)詳解及其發(fā)展
如何應對UWB室內(nèi)定位信號被遮擋

UWB標簽在室內(nèi)定位中的優(yōu)勢
UWB+北斗RTK室內(nèi)外融合定位

無線室內(nèi)定位系統(tǒng)是通過什么技術(shù)實現(xiàn)的呢?

如何利用LoRa實現(xiàn)室內(nèi)定位?

采用ava+BS架構(gòu)開發(fā)的工業(yè)級UWB室內(nèi)定系統(tǒng)源碼UWB Ultra-Wideband定位系統(tǒng)技術(shù)接口及技術(shù)特點
一文介紹:UWB定位基站種類及選擇






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論