") dfrobotHUSKYLENS 人工智能攝像頭簡介
dfrobotHUSKYLENS 人工智能攝像頭簡介

簡單易用的人工智能攝像頭(人臉識(shí)別、顏色識(shí)別、標(biāo)簽/二維碼識(shí)別、物體識(shí)別、巡線、物體追蹤)-預(yù)售



簡介
HuskyLens是一款簡單易用的人工智能攝像頭(視覺傳感器),內(nèi)置6種功能:人臉識(shí)別、物體追蹤、物體識(shí)別、巡線追蹤、顏色識(shí)別、標(biāo)簽(二維碼)識(shí)別。僅需一個(gè)按鍵即可完成AI訓(xùn)練,擺脫繁瑣的訓(xùn)練和復(fù)雜的視覺算法,讓你更加專注于項(xiàng)目的構(gòu)思和實(shí)現(xiàn)。
HuskyLens板載UART / I2C接口,可以連接到Arduino、Raspberry Pi、LattePanda、micro:bit等主流控制器,實(shí)現(xiàn)硬件無縫對(duì)接,直接輸出識(shí)別結(jié)果給控制器,無需折騰復(fù)雜的算法,就能制作非常有創(chuàng)意的項(xiàng)目。
HuskyLens設(shè)計(jì)的很易用。撥動(dòng)功能按鍵,切換算法;按下學(xué)習(xí)按鍵,學(xué)習(xí)新事物。之后,HuskyLens就能認(rèn)識(shí)它們啦。
HuskyLens設(shè)計(jì)的也很智能。按一下學(xué)習(xí)按鍵,HuskyLens就能學(xué)習(xí)新事物;長按學(xué)習(xí)按鍵,HuskyLens還能從不同的角度和范圍學(xué)習(xí)它們。HuskyLens越學(xué)越準(zhǔn)確。
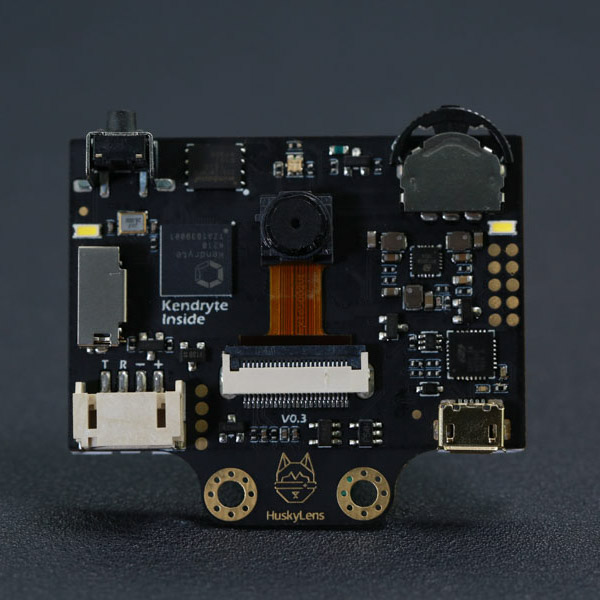
HuskyLens采用了新一代的AI芯片Kendryte K210,內(nèi)置64位400MHz雙核RISC-V 處理器,運(yùn)行神經(jīng)網(wǎng)絡(luò)算法的速度比STM32H743快1000倍以上。
經(jīng)典的YOLO人工智能算法在STM32H743上只能以每秒1?2幀的速度運(yùn)行,但在HuskyLens上則可以快30倍以上。它的性能異常出色,捕獲快速移動(dòng)的物體也不在話下。
有了HuskyLens,你的項(xiàng)目就有了與人或環(huán)境進(jìn)行交互的新方式,你可以探索更多的新應(yīng)用與新場景,例如:交互手勢控制、自主機(jī)器人、智能門禁、交互式玩具等。
交互手勢控制
HuskyLens能學(xué)習(xí)特定的手勢,它可以識(shí)別學(xué)過的手勢,并提供其位置數(shù)據(jù)。利用這些數(shù)據(jù),制作一個(gè)令人贊嘆的交互式項(xiàng)目從未如此簡單。
HuskyLens也能巡線。巡線并不是什么新東西,在這個(gè)應(yīng)用中,有許多性能出色的方案和算法。但是,它們大多數(shù)都需要繁瑣的參數(shù)調(diào)校。HuskyLens提供了一種全新的巡線方案,只需要按一下按鍵,就能學(xué)習(xí)新線條,之后就可以巡線了。
當(dāng)巡線功能與標(biāo)簽識(shí)別功能結(jié)合使用時(shí),HuskyLens就能自動(dòng)確定前進(jìn)的方向。從中體驗(yàn)制作自動(dòng)駕駛機(jī)小車的樂趣吧!
機(jī)器人的眼睛

HuskyLens還可以成為機(jī)器人的眼睛。它能使你的機(jī)器人認(rèn)識(shí)你,理解你的手勢命令,或者幫你回收指定的東西,等等。一切皆有可能!
技術(shù)規(guī)格
處理器:Kendryte K210
圖像傳感器:OV2640(200W像素)
供電電壓:3.3~5.0V
電流消耗:310mA@3.3V, 220mA@5.0V(電流值為典型值;人臉識(shí)別模式;80%背光亮度;補(bǔ)光燈關(guān)閉)
連線接口:串口(9600~115200bps),I2C
顯示屏:2.0寸IPS,分辨率320*240
內(nèi)置功能:物體追蹤,人臉識(shí)別,物體識(shí)別,巡線追蹤,顏色識(shí)別,標(biāo)簽識(shí)別
尺寸:52*44.5mm
-
嵌入式主板
+關(guān)注
關(guān)注
7文章
6101瀏覽量
36300 -
DFRobot
+關(guān)注
關(guān)注
4文章
1161瀏覽量
10808
發(fā)布評(píng)論請先 登錄
用于攝像頭模塊的 Open Top QFN 插槽Ironwood Electronics
開售RK3576 高性能人工智能主板
社區(qū)安裝IPC攝像頭,跟安裝一般安防監(jiān)控攝像頭有什么區(qū)別?

基于RK3588的AI攝像頭應(yīng)用解決方案


客流統(tǒng)計(jì)自動(dòng)識(shí)別攝像頭

邊坡智能監(jiān)測識(shí)別攝像頭

攝像頭及紅外成像的基本工作原理

飛凌嵌入式-ELFBOARD-OV5640攝像頭簡介

用于環(huán)視和CMS攝像頭系統(tǒng)的四通道攝像頭應(yīng)用程序

電動(dòng)車亂停放識(shí)別攝像頭

FPGA在智能攝像頭優(yōu)化中的作用
監(jiān)控室離崗智能監(jiān)測攝像頭







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論