") 一個(gè)開(kāi)源的低成本機(jī)器人學(xué)習(xí)平臺(tái)ROBEL
一個(gè)開(kāi)源的低成本機(jī)器人學(xué)習(xí)平臺(tái)ROBEL

為了讓機(jī)器人研究走向大眾,加州大學(xué)伯克利分校(UC Berkeley)和谷歌大腦的研究人員提出了一個(gè)開(kāi)源的低成本機(jī)器人學(xué)習(xí)平臺(tái)ROBEL(RoboticsBenchmarks for Learning with Low-Cost Robots)。
ROBEL可以作為快速實(shí)驗(yàn)平臺(tái),支持各種實(shí)驗(yàn)需求,以及新的強(qiáng)化學(xué)習(xí)和控制方法的開(kāi)發(fā),同時(shí)提供主要用于促進(jìn)現(xiàn)實(shí)世界物理硬件研究和開(kāi)發(fā)的基準(zhǔn)任務(wù)。其由D’Claw和D'Kitty組成,D'Claw是一個(gè)有三只手臂的機(jī)械臂型機(jī)器人,可以幫助學(xué)習(xí)靈巧的操作任務(wù);D'Kitty是一個(gè)有四條腿的機(jī)器人,可以幫助學(xué)習(xí)靈活的腿部運(yùn)動(dòng)任務(wù)。該機(jī)器人平臺(tái)具有低成本、模塊化、可靠性高、易于維護(hù)等特點(diǎn),并且功能強(qiáng)大,可支持基于硬件的強(qiáng)化學(xué)習(xí)。
圖中左:十二自由度D'Kitty;中:9 自由度D'Claw;右:功能齊全的D'Claw 裝置D’Lantern。
為了使機(jī)器人成本便宜和易于構(gòu)建,研究人員基于現(xiàn)成的組件和常見(jiàn)的原型工具(3D打印或激光切割)設(shè)計(jì)了ROBEL。該設(shè)計(jì)很容易組裝,只需要幾個(gè)小時(shí)即可構(gòu)建。
為了使機(jī)器人成本低且易于構(gòu)建,研究人員基于現(xiàn)成的組件和常用的原型制作工具(3D打印或激光切割)設(shè)計(jì)出ROBEL,并提供詳細(xì)的零件清單、組裝說(shuō)明和入門(mén)軟件說(shuō)明。ROBEL設(shè)計(jì)易于組裝,僅需幾個(gè)小時(shí)即可構(gòu)建。
谷歌設(shè)計(jì)了一套對(duì) D’Claw和D’Kitty兩個(gè)平臺(tái)都適用的任務(wù),可用于對(duì)現(xiàn)實(shí)世界的機(jī)器人學(xué)習(xí)進(jìn)行基準(zhǔn)測(cè)試。ROBEL的任務(wù)定義包括密集和稀疏任務(wù)目標(biāo),并在任務(wù)定義中引入硬件安全指標(biāo),例如,指示關(guān)節(jié)是否超過(guò)“安全”操作界限或作用力閾值。此外,ROBEL還為所有任務(wù)提供模擬器,以促進(jìn)算法開(kāi)發(fā)和快速原型設(shè)計(jì)。D’Claw 任務(wù)主要圍繞三種常見(jiàn)的操作行為展開(kāi):擺形(Pose)、旋轉(zhuǎn)(Turn)和擰(Screw);D’Kitty任務(wù)主要圍繞三種常見(jiàn)的移動(dòng)行為——站立、定向和行走展開(kāi)。針對(duì)這些基準(zhǔn)任務(wù),研究人員評(píng)估了幾種深度強(qiáng)化學(xué)習(xí)方法,評(píng)估結(jié)果和最終策略被作為baseline包含在軟件包中以供比較。
ROBEL平臺(tái)支持直接的硬件訓(xùn)練,迄今已積累了超過(guò)1.4萬(wàn)h的實(shí)際經(jīng)驗(yàn)。為了確保平臺(tái)和基準(zhǔn)方法的可重復(fù)性,研究人員通過(guò)兩個(gè)不同的實(shí)驗(yàn)室分別對(duì)ROBEL進(jìn)行了研究,本研究?jī)H使用軟件分發(fā)和文檔、不允許親自訪(fǎng)問(wèn),利用ROBEL的設(shè)計(jì)文檔和組裝說(shuō)明,兩者都可以復(fù)制兩個(gè)硬件平臺(tái)。基準(zhǔn)任務(wù)訓(xùn)練在兩個(gè)實(shí)驗(yàn)室分別構(gòu)建的機(jī)器人上進(jìn)行,實(shí)驗(yàn)表明,在兩個(gè)不同地點(diǎn)打造的兩個(gè)D'Claw機(jī)器人,它們不僅訓(xùn)練進(jìn)度相似,而且最終收斂到了相同的性能,這說(shuō)明ROBEL基準(zhǔn)具備良好的可重復(fù)性。
ROBEL在各種強(qiáng)化學(xué)習(xí)研究中都非常有用。D’Claw平臺(tái)是完全自主的,可以在很長(zhǎng)一段時(shí)間內(nèi)維持實(shí)驗(yàn)的可靠性,而且可以使用剛性和柔性對(duì)象的各種強(qiáng)化學(xué)習(xí)范例和任務(wù)改進(jìn)實(shí)驗(yàn)。重要的是,D'Claw平臺(tái)是高度模塊化的,而且具備高度可重復(fù)性,便于進(jìn)行擴(kuò)展實(shí)驗(yàn)。通過(guò)擴(kuò)展設(shè)置,研究人員發(fā)現(xiàn)多個(gè)D'Claws可以通過(guò)共享經(jīng)驗(yàn)更快地對(duì)任務(wù)進(jìn)行集體學(xué)習(xí),通過(guò)共享SAC的分布式版本的硬件訓(xùn)練流程,其可以面向多個(gè)目標(biāo)任務(wù)實(shí)現(xiàn)任意角度的結(jié)合。在多任務(wù)定制中,完成五個(gè)任務(wù)只需要單個(gè)任務(wù)經(jīng)驗(yàn)的2倍時(shí)間即可。
同時(shí),研究人員成功地在D’Kitty平臺(tái)上部署了強(qiáng)大的移動(dòng)策略,比如,D'Kitty可以在“盲眼”條件下在室內(nèi)和室外地形上穩(wěn)定行走,展現(xiàn)了步態(tài)的穩(wěn)健性。
具體而言,在雜亂的室內(nèi)環(huán)境行走時(shí),通過(guò)MuJoCo模擬通過(guò)自然策略梯度訓(xùn)練的Sim2Real策略,機(jī)器人可以在隨機(jī)擾動(dòng)的條件下實(shí)現(xiàn)行走,并跨過(guò)障礙物;在布滿(mǎn)碎石和樹(shù)枝的室外環(huán)境行走時(shí),通過(guò)自然策略梯度在MuJoCo模擬中訓(xùn)練的Sim2Real策略具有隨機(jī)的高度場(chǎng),機(jī)器人可以學(xué)習(xí)在分布著碎石和樹(shù)枝的戶(hù)外環(huán)境中行走;在室外斜坡和草叢環(huán)境中,通過(guò)自然策略梯度在MuJoCo模擬中訓(xùn)練的Sim2Real策略具有隨機(jī)高度場(chǎng),機(jī)器人可以學(xué)習(xí)在緩坡上行走。
當(dāng)D’Kitty收到有關(guān)其軀干和場(chǎng)景中目標(biāo)的信息時(shí),其可以學(xué)會(huì)與表現(xiàn)出復(fù)雜行為的目標(biāo)進(jìn)行交互。比如,通過(guò)HierarchicalSim2Real訓(xùn)練的策略可以學(xué)習(xí)躲避移動(dòng)障礙物,到達(dá)目標(biāo)位置;通過(guò)Hierarchical Sim2Real訓(xùn)練的策略學(xué)習(xí)將目標(biāo)推向移動(dòng)目標(biāo)(由手中的控制器標(biāo)記);雙機(jī)器人協(xié)同-通過(guò)Hi-Herarchical Sim2Real訓(xùn)練的策略,可以學(xué)習(xí)協(xié)調(diào)兩個(gè)D'Kitty機(jī)器人,將沉重的障礙物推向目標(biāo)位置。
總之,ROBEL可以滿(mǎn)足新興的基于學(xué)習(xí)范式的需求,這些范式需要高度的可擴(kuò)展性和彈性。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29706瀏覽量
212677 -
3D打印
+關(guān)注
關(guān)注
27文章
3589瀏覽量
112379
原文標(biāo)題:加州大學(xué)伯克利分校和谷歌大腦聯(lián)合推出低成本機(jī)器人訓(xùn)練平臺(tái)
文章出處:【微信號(hào):robotmagazine,微信公眾號(hào):機(jī)器人技術(shù)與應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開(kāi)源六軸機(jī)械臂產(chǎn)品
構(gòu)建人形機(jī)器人學(xué)習(xí)的合成運(yùn)動(dòng)生成流程

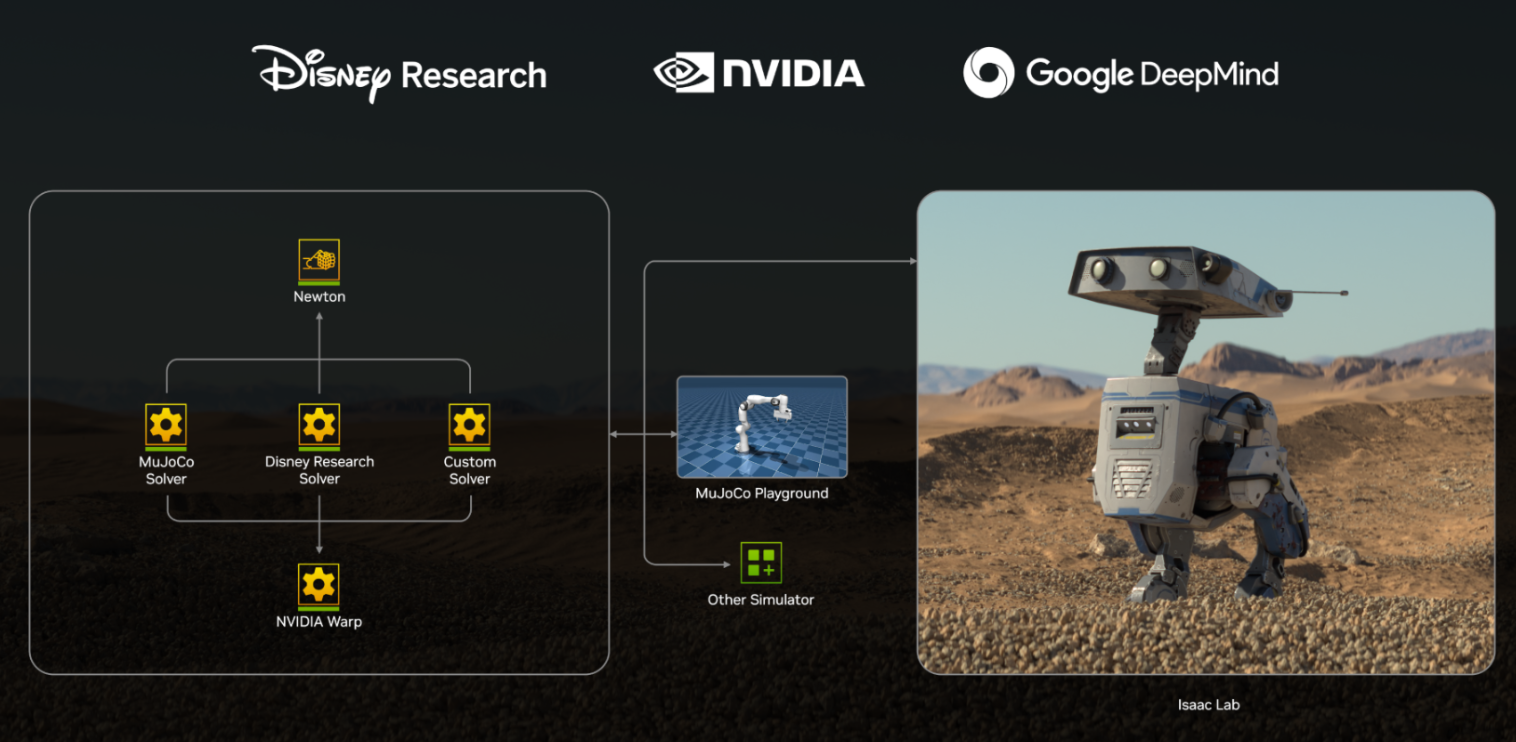
深度解讀英偉達(dá)Newton機(jī)器人平臺(tái):技術(shù)革新與跨界生態(tài)構(gòu)建
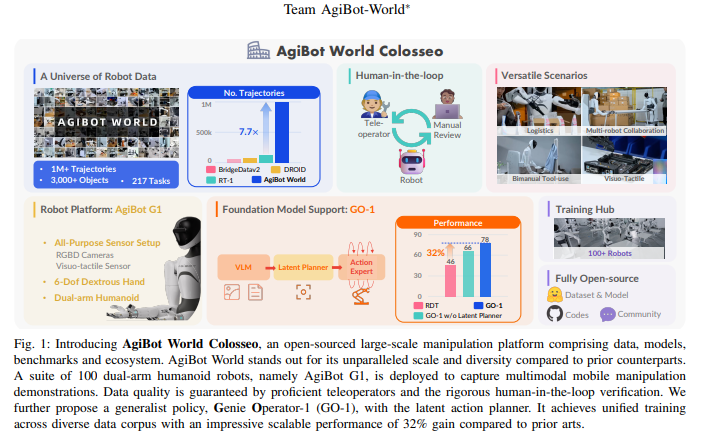
AgiBot World Colosseo:構(gòu)建通用機(jī)器人智能的規(guī)模化數(shù)據(jù)平臺(tái)
開(kāi)源項(xiàng)目!教你如何制作一個(gè)開(kāi)源教育機(jī)械臂
構(gòu)建人形機(jī)器人學(xué)習(xí)的合成運(yùn)動(dòng)生成管線(xiàn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論