") gps技術(shù)與無(wú)人機(jī)的結(jié)合
gps技術(shù)與無(wú)人機(jī)的結(jié)合

無(wú)人機(jī)用途廣泛,具有造價(jià)低、多任務(wù)、無(wú)人員傷亡、機(jī)動(dòng)性好、效益高和低輻射等特點(diǎn),被廣泛運(yùn)用于軍事和民用生產(chǎn)各個(gè)方面。
由于GPS具有全天候、高精度和自動(dòng)測(cè)量的特點(diǎn),目前用于測(cè)繪的無(wú)人機(jī)基本都是用GPS進(jìn)行定位和導(dǎo)航。無(wú)人機(jī)飛控的GPS單點(diǎn)定位精度太差,之前都是使用大量的像控點(diǎn)去校正影像的畸變。
但是,有些特殊地形(如山川、峽谷、河流等)外業(yè)人員很難布設(shè)像控點(diǎn),為了減輕工作量,減少大部分像控點(diǎn)甚至是不需要像控點(diǎn),就必需提高飛機(jī)pos點(diǎn)的精度,RTK技術(shù)和PPK技術(shù)均可達(dá)到厘米級(jí)精度。
以下我們從RTK和PPK這兩種技術(shù)原理出發(fā),進(jìn)行對(duì)比分析,以找出更適合應(yīng)用于GPS空中定位的方法。
RTK的作業(yè)原理
RTK(Real Time Kinematic)測(cè)量系統(tǒng)一般由三部分組成:即GPS接收設(shè)備、數(shù)據(jù)傳輸系統(tǒng)和實(shí)施動(dòng)態(tài)測(cè)量的軟件系統(tǒng)。RTK測(cè)量技術(shù)是以載波相位觀測(cè)量為根據(jù)的,有快速高精度定位功能的載波相位差分測(cè)量技術(shù),它能夠?qū)崟r(shí)獲得測(cè)站點(diǎn)在指定坐標(biāo)系中的三維定位結(jié)果,且具有厘米級(jí)的定位精度。
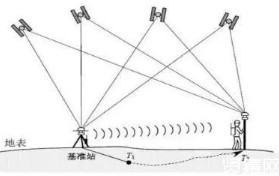
RTK(Real Time Kinematic)測(cè)量系統(tǒng)
RTK測(cè)量的工作原理是:將一臺(tái)接收機(jī)置于基準(zhǔn)站上,另一臺(tái)或幾臺(tái)接收機(jī)置于載體(稱為移動(dòng)站)上,基準(zhǔn)站和移動(dòng)站同時(shí)接收同一時(shí)間、同一GPS衛(wèi)星發(fā)射的信號(hào),基準(zhǔn)站所獲得的觀測(cè)值與已知位置信息進(jìn)行比較,得到GPS差分改正值。然后將這個(gè)改正值通過(guò)無(wú)線電數(shù)據(jù)鏈電臺(tái)及時(shí)傳遞給共視衛(wèi)星的移動(dòng)站精化其GPS觀測(cè)值,從而得到經(jīng)差分改正后移動(dòng)站較準(zhǔn)確的實(shí)時(shí)位置。
目前主流的廠商RTK的定位平面精度可達(dá)8mm+1ppm,高程精度可達(dá)15mm+1ppm。基站與移動(dòng)站之間的通訊方式主要有電臺(tái)和網(wǎng)絡(luò)兩種,電臺(tái)信號(hào)穩(wěn)定,網(wǎng)絡(luò)信號(hào)傳輸距離遠(yuǎn),各有優(yōu)點(diǎn)。
PPK的作業(yè)原理
PPK(Post-Processing Kinematic,GPS動(dòng)態(tài)后處理差分)技術(shù)的工作原理是利用一臺(tái)進(jìn)行同步觀測(cè)的基準(zhǔn)站接收機(jī)和至少一臺(tái)流動(dòng)接收機(jī),對(duì)GPS衛(wèi)星進(jìn)行同步觀測(cè);也就是基準(zhǔn)站保持連續(xù)觀測(cè),初始化后的流動(dòng)站遷站至下一個(gè)待定點(diǎn),在遷站過(guò)程中需要保持對(duì)衛(wèi)星的連續(xù)跟蹤,以便將整周模糊度傳遞至待定點(diǎn)。
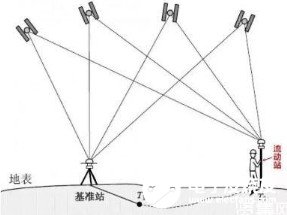
PPK(Post-Processing Kinematic,GPS動(dòng)態(tài)后處理差分)技術(shù)的工作原理
基準(zhǔn)站和流動(dòng)站同步接收的數(shù)據(jù)在計(jì)算機(jī)中進(jìn)行線性組合,形成虛擬的載波相位觀測(cè)量,確定接收機(jī)之間的相對(duì)位置,最后引入基準(zhǔn)站的已知坐標(biāo),從而獲得流動(dòng)站的三維坐標(biāo)。
PPK技術(shù)是最早的GPS動(dòng)態(tài)差分技術(shù)方式(又稱半動(dòng)態(tài)法、準(zhǔn)動(dòng)態(tài)相對(duì)定位法、走走停停(Stop and Go)法),它與RTK技術(shù)的主要區(qū)別在于:在基準(zhǔn)站和流動(dòng)站之間,不必象RTK那樣,建立實(shí)時(shí)數(shù)據(jù)傳輸,而是在定位觀測(cè)后,對(duì)兩臺(tái)GPS接收機(jī)所采集的定位數(shù)據(jù)進(jìn)行測(cè)后的聯(lián)合處理,從而計(jì)算出流動(dòng)站在對(duì)應(yīng)時(shí)間上的坐標(biāo)位置,其基準(zhǔn)站和流動(dòng)站之間的距離沒(méi)有嚴(yán)格的限制。它的優(yōu)點(diǎn)是定位精度高、作業(yè)效率高、作業(yè)半徑大、易操作。
RTK和PPK相同點(diǎn)
1、作業(yè)模式相同。兩種技術(shù)都采用參考站加流動(dòng)站的作業(yè)模式。
2、兩種技術(shù)在作業(yè)前都需要初始化。
3、兩者都能達(dá)到厘米級(jí)精度。
RTK和PPK不同點(diǎn)
1、通訊方式不同。RTK技術(shù)需要電臺(tái)或者網(wǎng)絡(luò),傳輸?shù)氖遣罘謹(jǐn)?shù)據(jù);PPK技術(shù)不需要通訊技術(shù)的支持,記錄的是靜態(tài)數(shù)據(jù)。
2、定位作業(yè)的方式不同。RTK采用的實(shí)時(shí)定位技術(shù),可以在流動(dòng)站隨時(shí)看到測(cè)量點(diǎn)的坐標(biāo)以及精度情況;PPK定位屬于后處理定位,在現(xiàn)場(chǎng)看不到點(diǎn)的坐標(biāo),需要事后處理才能看到結(jié)果。
3、作業(yè)半徑不同。RTK作業(yè)受到通訊電臺(tái)的制約,作業(yè)距離一般不超過(guò)10 km,網(wǎng)絡(luò)模式的需要網(wǎng)絡(luò)信號(hào)全覆蓋的區(qū)域;運(yùn)用PPK技術(shù)作業(yè),一般作業(yè)半徑可以達(dá)到50 km。
4、受衛(wèi)星信號(hào)影響的程度不同。RTK作業(yè)時(shí),如果在大樹(shù)等障礙物的附近,非常容易失鎖;而PPK作業(yè)時(shí),經(jīng)過(guò)初始化后,一般不易失鎖。
5、定位精度不同。RTK平面精度8mm+1ppm,高程精度15mm+1ppm PPK平面精度2.5mm+0.5ppm,高程精度5mm+0.5ppm。
6、定位頻率不同。RTK基站發(fā)送差分?jǐn)?shù)據(jù)和移動(dòng)站接收的頻率一般為1-2 HZ,PPK定位頻率最大可達(dá)50HZ。
對(duì)比分析
1、無(wú)人機(jī)空中飛行速度很快,需要很高的定位頻率,用RTK技術(shù)實(shí)時(shí)導(dǎo)航很難達(dá)到這個(gè)條件,PPK支持50HZ定位頻率,完全滿足需求。
2、RTK實(shí)時(shí)提供位置信息,PPK可通過(guò)后處理方式解算一個(gè)周期內(nèi)的歷元數(shù)據(jù)不僅可以提高固定率,而且解算精度更高。
3、RTK需要用電臺(tái)或者網(wǎng)絡(luò)通信模塊,PPK則不需要,減少無(wú)人機(jī)的負(fù)荷,增加飛機(jī)續(xù)航時(shí)間。
4、RTK作業(yè)距離有限,PPK作業(yè)距離更遠(yuǎn)可達(dá)50km,在長(zhǎng)距離大范圍的作業(yè)區(qū)域內(nèi),尤其是帶狀區(qū)域,比如輸電線路、公路、鐵路、油氣管道,PPK將是最佳選擇。
總結(jié)
雖然RTK可以實(shí)時(shí)提供高精度位置信息,但是目前在無(wú)人機(jī)的應(yīng)用上有很大的技術(shù)難題。PPK相對(duì)于RTK最大的好處就是可以事后處理,逆向?yàn)V波(Reverse Kalman Filter),這樣就可以解決一部分衛(wèi)星失鎖的問(wèn)題,通過(guò)融合解(Forward&Reverse)提高定位精度。
PPK技術(shù)是一種更適合搭載在無(wú)人機(jī)上的空間定位技術(shù)隨著科技的發(fā)展。無(wú)人機(jī)技術(shù)的日趨成熟,大范圍的作業(yè)比傳統(tǒng)RTK測(cè)量效率提高很多很多。PPK技術(shù)在無(wú)人機(jī)方面明顯具有更廣闊的發(fā)展前景,PPK技術(shù)勢(shì)必會(huì)成為無(wú)人機(jī)在測(cè)繪方面給的中流砥柱。
-
衛(wèi)星
+關(guān)注
關(guān)注
18文章
1763瀏覽量
68424 -
GPS定位
+關(guān)注
關(guān)注
4文章
81瀏覽量
23031 -
無(wú)人機(jī)
+關(guān)注
關(guān)注
231文章
10825瀏覽量
186622 -
基準(zhǔn)站
+關(guān)注
關(guān)注
1文章
6瀏覽量
7386
發(fā)布評(píng)論請(qǐng)先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論