 科學家開發出一種無人駕駛水面艦艇 可用來部署AUV新的系統
科學家開發出一種無人駕駛水面艦艇 可用來部署AUV新的系統

雖然自動水下航行器(AUVs)確實使收集海洋數據變得更容易,但發射這些東西仍然是一件麻煩事,這就是為什么科學家們開發了一種使用無人駕駛的水面艦艇來部署AUV新的系統的原因。通常自動水下航行器是從一艘全船上發射的,這意味著該船在駛向部署點時必須燃燒燃料并增加其他費用。
此外,始終存在遇到惡劣天氣條件或敵對方(例如海 盜或外國武 裝部隊)的風險或者可以從岸上發射AUV,然而這樣做在邏輯上要復雜得多,而且潛水器在前往研究區域的途中會浪費大量電池電力。
考慮到這些限制,英國東安格利亞大學的一個研究小組最近對現有的無人駕駛水面交通工具AutoNaut進行了改進以便可以運輸然后部署稱為Seaglider的現有AUV。這個由兩部分組成的系統被命名為Caravela,這是根據葡萄牙人對戰 爭時期的“水母”(實際上并不是真正的水母)的學名命名的。
Caravela可以很容易地從岸上發射。然后僅靠海浪的力量推動它前進到AUV部署地點。 AutoNaut結合了波浪箔技術,在這種技術中,安裝在龍骨上的前后彈力箔從波浪的上升和下降中收集能量并將其直接轉換為推進力使之成為可能。
在此過程中,AutoNaut的太陽能傳感器收集并傳輸數據,例如氣壓、空氣溫度、濕度、風速和海面溫度。車載GPS一旦檢測到到達目的地便會自動釋放Seaglider以便AUV可以開始自己的水下數據收集冒險之旅。潛水器能夠下降到1000米(3281英尺)的深度,一次旅行數月可覆蓋數千公里。
根據計劃,在本月晚些時候對Caravela進行現場測試,屆時將在巴巴多斯海岸使用它來研究海洋溫度如何影響上方的空氣層,風和陽光以及如何影響海面數十米。
東英吉利大學(East Anglia)的Karen Heywood教授首先提出了這一概念。他說:“現在,無需使用船就可以將海滑翔機送入海盆中部,然而這太危險了。這意味著我們可以為科學儲備滑翔機電池,因此具有更長的使用壽命,還可以能夠更準確地決定何時釋放滑翔機,比如在春天開花或極端天氣事件之前。”
責任編輯:wv
-
無人駕駛
+關注
關注
99文章
4172瀏覽量
123408
發布評論請先 登錄

無人駕駛技術未來在哪里?低速才是突破口

易控智駕發布礦山無人駕駛應用落地成果
DeepSeek眼中的礦山無人駕駛
為什么聊自動駕駛的越來越多,聊無人駕駛的越來越少?

小馬智行第六代無人駕駛Robotaxi亮相香港國際機場
無人駕駛的前世今生:一部充滿爭議的革命史

UWB模塊如何助力無人駕駛技術
AI for Science:人工智能驅動科學創新》第4章-AI與生命科學讀后感
特斯拉推出無人駕駛Model Y
百度計劃海外推出蘿卜快跑無人駕駛服務
馬斯克稱:通用因技術未成熟放棄無人駕駛
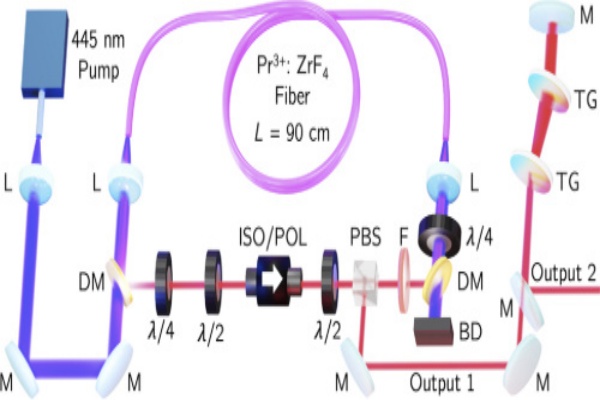
科學家開發出首臺可見光飛秒光纖激光器
5G賦能車聯網,無人駕駛引領未來出行

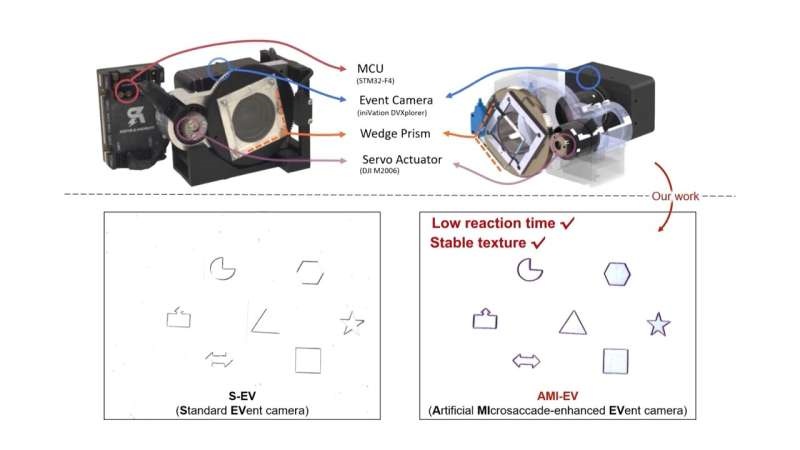
受人眼啟發!科學家開發出新型改良相機





 工商網監
工商網監
評論