 51單片機進階學習計劃
51單片機進階學習計劃

進階學習計劃:
一:最小系統能夠運行起來的必要條件。
1.電源 2.晶振3.復位電路
二:對單片機任意IO口的隨意操作
1.輸出控制電平高低2.輸出檢測電平高低。
三:單片機特殊功能應用
1:定時器:重點掌握最常用的方式2
2:中斷:外部中斷、定時器中斷、串口中斷
3:串口通信:單片機之間、單片機與計算機間
(在此不詳細介紹單片機C語言)
一:最小系統運行條件
1.電源 2.晶振3.復位電路 詳細資料參見導論中的最小系統電路圖
二:普通I/O口的操作
1:輸出高低電平 output
操作:用程序給輸出寄存器P0/P1/P2/P3賦值,1/0實現高低電平的控制
應用:這種高低可實現一些對外部設備的控制,比如led,lcd····,也可加上電流驅動或繼電器或可控硅等器件實現對大型用電器的控制
實例:I/O操作最簡單的實例就是流水燈,流水燈程序參見:http://blog.csdn.net/metalseed/article/details/8196727
2:檢測電平高低 input
操作:先給寄存器P1/P2/P3賦值0xff,然后用 if 語句來進行判斷
應用:可用來讀取外部外部信息實現模擬通信,獲得傳感器數據,按鍵采集等
實例:矩陣鍵盤的掃描代碼:http://blog.csdn.net/metalseed/article/details/8296590
數碼管顯示:http://blog.csdn.net/metalseed/article/details/8537554
PS: P0為三態(高電平,低電平,高阻態) P1,P2,P3為準雙向IO口(內部有上拉電阻,做輸入用時,先寫1)
三:單片機特殊功能應用
這是進階的核心內容,單片機的特殊功能全部集中在P3口,這些引腳具有多功能,可通過寄存器配置(關于寄存器,日后補上詳細描述,寄存器理解屬于高階思想,在此先講操作)來確定啟用第幾功能。
首先附上P3第二功能定義
P3第二功能定義:
P3.0:RXD串行口輸入
P3.1:TXD串行口輸出
P3.2:INT0外部中斷0輸入
P3.3:INT1外部中斷1輸入
P3.4:T0定時器0外部輸入
P3.5:T1定時器1外部輸入
P3.6:WR外部寫控制
P3.7:RD外部讀控制
1:中斷
中斷的概念:
中斷其實很容易理解,這樣來說吧,比如說你在做A事,但是突然間來了你想起來了更重要的B事,所以你馬上去做B事了,做完之后再回來繼續做A事,這個就是中斷!在程序里面也是一樣的!中斷系統里面有五個中斷,外部中斷0和1,定時器/計數器中斷0/1,串行口中斷!
舉個例子你可能會容易懂點,定時中斷:比如你定時1ms,主程序在運行,每當1ms時間到后,就跑到定時中斷子程序 里面執行,執行完后再回到主程序。。。中斷程序是1ms進去一次
后面中斷講解太過系統,不易理解,日后補上簡潔易懂的,請親見諒.....。。
中斷data請移步至:http://wenku.baidu.com/view/4f3738f64693daef5ef73da6.html
中斷實例:
超聲波外部中斷 + 串口通信 將測出的距離通過串口發送
http://blog.csdn.net/metalseed/article/details/8764348
2:定時器
定時器簡介
定時器及計數器的應用,比 I / O 功能稍微高級點,可實現更為復雜的功能。
顧名思義,定時器可實現延時操作,計數器則可實現計數功能(這兩者都靠中斷實現)。
兩者實質上都是加一計數器(16位),由高8位和低8位兩個寄存器組成,當所有位為1即定時器溢出時,便觸發中斷。
PS:51內部有兩個定時器:定時器0,定時器1,定時模式加1的周期為一個機器周期 12M晶振的機器周期為1us
應用定時器,需要操作響應的寄存器。
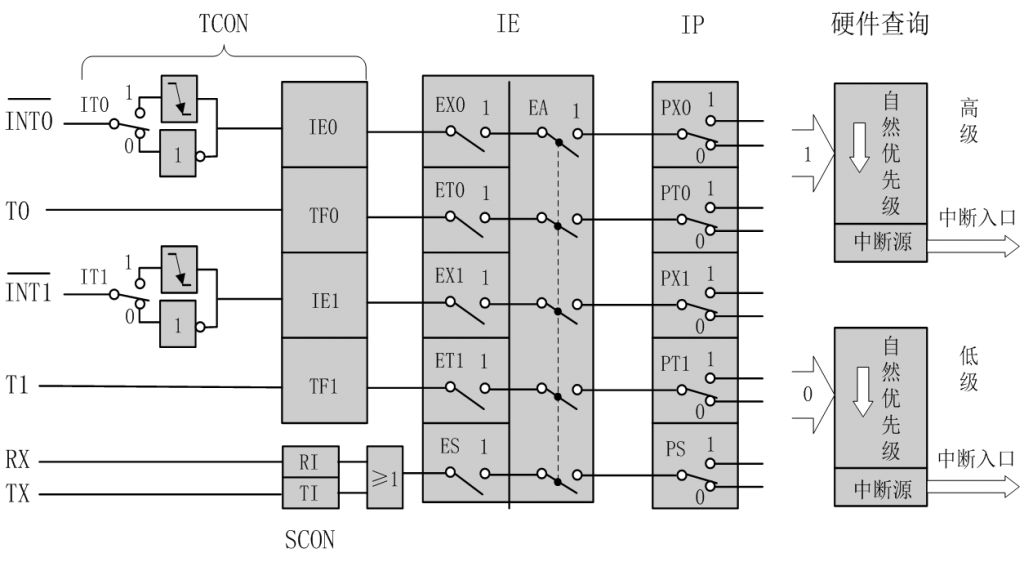
主要涉及三個:1:中斷允許寄存器IE (可位尋址,所以能直接操作EA,ET0, ET1,)
2:TMOD 是定時/計數的工作方式寄存器,確定工作方式和功能
3:TCON是控制寄存器,控制T0,T1的啟動和停止及設置溢出標志。
操作方法:
step 1:配置IE寄存器,讓定時器使能(使能即能被應用,可假象為函數的聲明)。
step 2:配置TMOD寄存器,來確定定時器的工作方式,同時配置TH,TL寄存器來對定時器裝入初值
step 3:配置TCON寄存器,啟動或停止定時器(因為定時器一旦啟用,就不停加1,直到TH,TL所有位為1時溢出,跳入中斷函數,所以在啟用前,要寫好中斷函數,中斷函數寫法demo里有說明)
這里所說的配置,即給寄存器賦值,例如:TMOD = 0X0f;
總而言之:要使用定時器或者計數器需要依次給如下寄存器賦值:IE,TOMD,TH,TL, TCON,具體要賦什么值,參加下面的寄存器位含義說明;
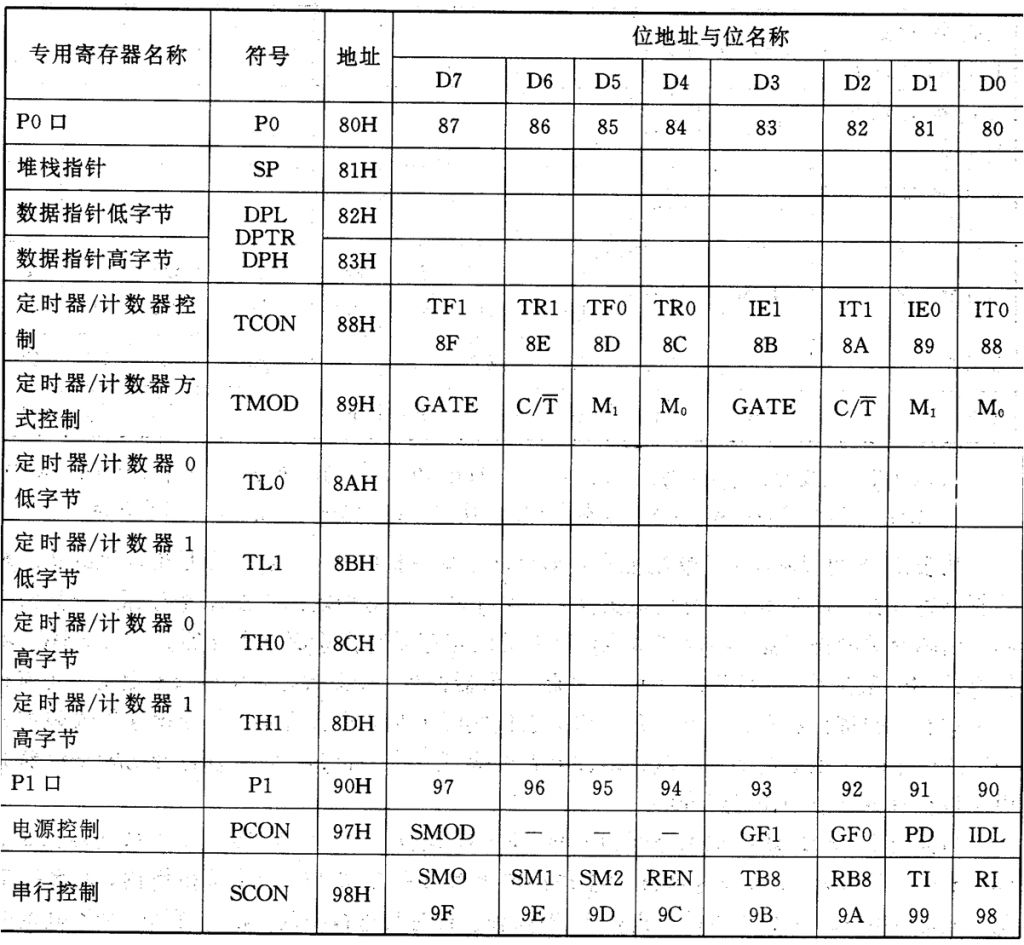
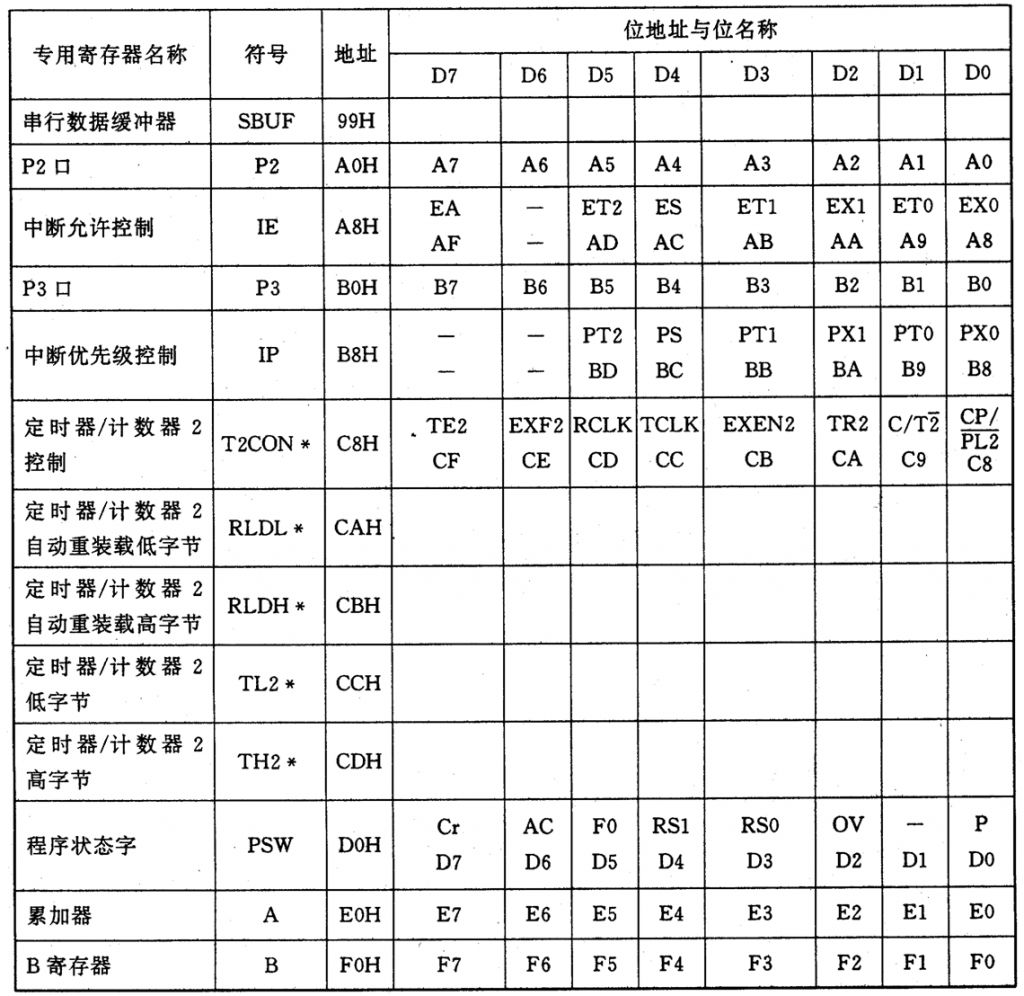
寄存器說明及定時器工作方式:
點擊打開特殊功能寄存器詳細說明
代碼示例:
1:最直白的定時器工作方式1演示,每隔50MS P0取反
[java] view plain copy print?
#include
void main()
{
EA = ET0 = 1; /*step 1 : 中斷允許*/
TMOD = 0x01; /*step 2 : 模式配置*/
TH0 = (65536 - 50000) / 256; /*裝初值*/
TL0 = (65536 - 50000) % 256; /*裝初值*/
TR0 = 1; /*step 3 : 啟動*/
while(1)
{
/*Hello World*/
}
}
/*timer0為函數名,隨意寫,后面的interrupt X,X是相應中斷的編號,5個中斷源各有固定編號*/
/*using x 表示占用ram中的X寄存器(0-3),C語言中IDE自動分配不用寫 */
void timer0() interrupt 1 using 1
{
/*重裝初值*/
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
/*operation*/
P0 = ~P0;
}
2:高級模板
待補~
3:串口通信
RS-422A用于全雙工,而RS-485則用于半雙工(比232距離遠)
需配置的寄存器 :SCON PCON IE
SCON是一個特殊功能寄存器,用以設定串行口的工作方式、接收/發送控制以及設置狀態標志:

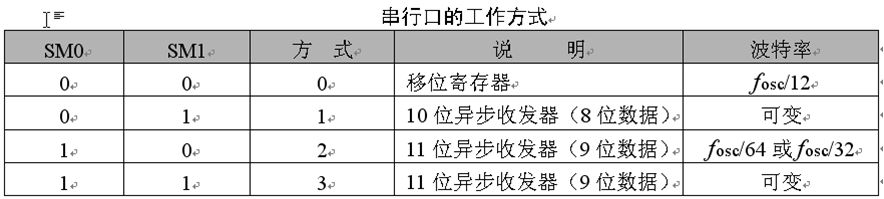
SM0和SM1為工作方式選擇位,可選擇四種工作方式
SM2,多機通信控制位,主要用于方式2和方式3。當接收機的SM2=1時可以利用收到的RB8來控制是否激活RI(RB8=0時不激活RI,收到的信息丟棄;RB8=1時收到的數據進入SBUF,并激活RI,進而在中斷服務中將數據從SBUF讀走)。當SM2=0時,不論收到的RB8為0和1,均可以使收到的數據進入SBUF,并激活RI(即此時RB8不具有控制RI激活的功能)。通過控制SM2,可以實現多機通信。
在方式0時,SM2必須是0。在方式1時,若SM2=1,則只有接收到有效停止位時,RI才置1。
REN,允許串行接收位。由軟件置REN=1,則啟動串行口接收數據;若軟件置REN=0,則禁止接收。
TB8,在方式2或方式3中,是發送數據的第九位,可以用軟件規定其作用。可以用作數據的奇偶校驗位,或在多機通信中,作為地址幀/數據幀的標志位。
在方式0和方式1中,該位未用。
RB8,在方式2或方式3中,是接收到數據的第九位,作為奇偶校驗位或地址幀/數據幀的標志位。在方式1時,若SM2=0,則RB8是接收到的停止位。
TI,發送中斷標志位。在方式0時,當串行發送第8位數據結束時,或在其它方式,串行發送停止位的開始時,由內部硬件使TI置1,向CPU發中斷申請。在中斷服務程序中,必須用軟件將其清0,取消此中斷申請。
RI,接收中斷標志位。在方式0時,當串行接收第8位數據結束時,或在其它方式,串行接收停止位的中間時,由內部硬件使RI置1,向CPU發中斷申請。也必須在中斷服務程序中,用軟件將其清0,取消此中斷申請。
PCON中只有一位SMOD與串行口工作有關:
SMOD(PCON.7) 波特率倍增位。在串行口方式1、方式2、方式3時,波特率與SMOD有關,當SMOD=1時,波特率提高一倍。復位時,SMOD=0。
波特率的計算
方式0的波特率= fosc/12
方式2的波特率=(2SMOD/64)·fosc
方式1的波特率=(2SMOD/32)·(T1溢出率)
方式3的波特率=(2SMOD/32)·(T1溢出率)
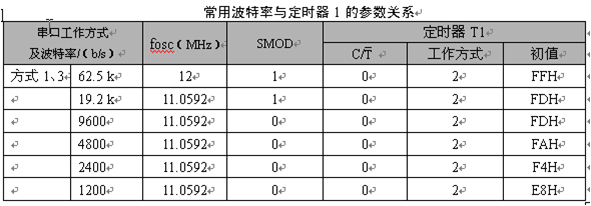
當T1作為波特率發生器時,最典型的用法是使T1工作在自動再裝入的8位定時器方式(即方式2,且TCON的TR1=1,以啟動定時器)。這時溢出率取決于TH1中的計數值。
T1溢出率=fosc /{12×[256-(TH1)]}
操作步驟:
1:確定串口工作方式 (配置SCON 可位尋址)
2:根據1確定的方式,看是否需要手動設置波特率 (TMODE,TH TL)
3:設置波特率后啟動(REN, TR)
4:如果使用中斷,開中斷并寫函數(EA = ES = 1, void ser() interrupt 4 )
串口通信模板:
http://blog.csdn.net/metalseed/article/details/8579997
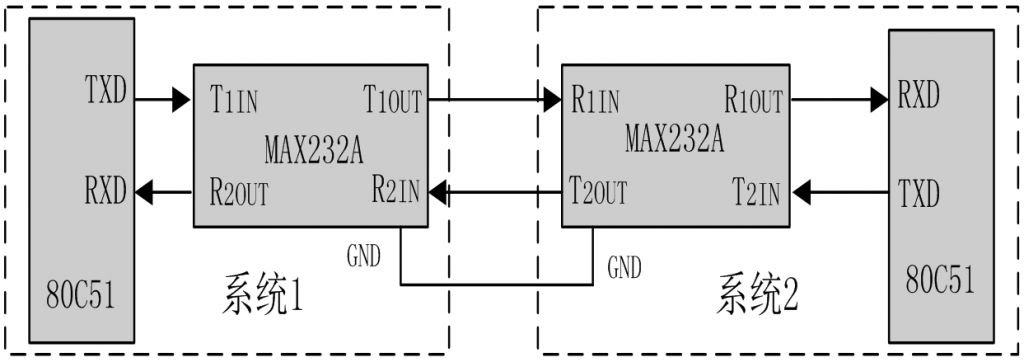
點對點通信:
多機通信:
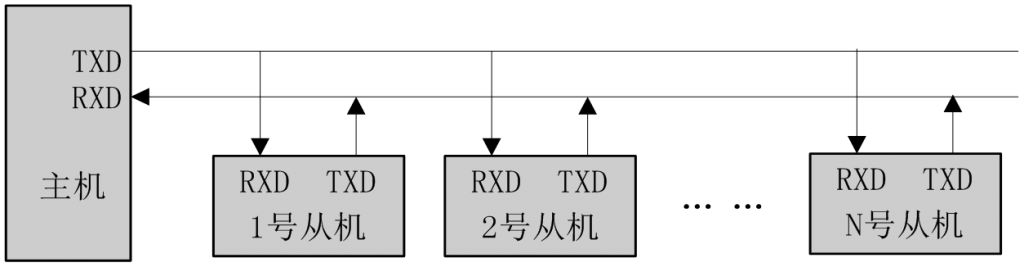
1、硬件連接
單片機構成的多機系統常采用總線型主從式結構。所謂主從式,即在數個單片機中,有一個是主機,其余的是從機,從機要服從主機的調度、支配。80C51單片機的串行口方式2和方式3適于這種主從式的通信結構。當然采用不同的通信標準時,還需進行相應的電平轉換,有時還要對信號進行光電隔離。在實際的多機應用系統中,常采用RS-485串行標準總線進行數據傳輸。
2、通信協議
所有從機的SM2位置1,處于接收地址幀狀態。
主機發送一地址幀,其中8位是地址,第9位為地址/數據的區分標志,該位置1表示該幀為地址幀。
所有從機收到地址幀后,都將接收的地址與本機的地址比較。對于地址相符的從機,使自己的SM2位置0(以接收主機隨后發來的數據幀),并把本站地址發回主機作為應答;對于地址不符的從機,仍保持SM2=1,對主機隨后發來的數據幀不予理睬。
從機發送數據結束后,要發送一幀校驗和,并置第9位(TB8)為1,作為從機數據傳送結束的標志。
主機接收數據時先判斷數據接收標志(RB8),若RB8=1,表示數據傳送結束,并比較此幀校驗和,若正確則回送正確信號00H,此信號命令該從機復位(即重新等待地址幀);若校驗和出錯,則發送0FFH,命令該從機重發數據。若接收幀的RB8=0,則存數據到緩沖區,并準備接收下幀信息。
主機收到從機應答地址后,確認地址是否相符,如果地址不符,發復位信號(數據幀中TB8=1);如果地址相符,則清TB8,開始發送數據。
從機收到復位命令后回到監聽地址狀態(SM2=1)。否則開始接收數據和命令。
3、應用程序
主機發送的地址聯絡信號為:00H,01H,02H ,… …(即從機設備地址),地址FFH為命令各從機復位,即恢復SM2=1。
主機命令編碼為:01H,主機命令從機接收數據;02H,主機命令從機發送數據。其它都按02H對待。

RRDY=1:表示從機準備好接收。
TRDY=1:表示從機準備好發送。
ERR=1:表示從機接收的命令是非法的。
程序分為主機程序和從機程序。約定一次傳遞數據為16個字節,以01H地址的從機為例。
寄存器數據手冊:
單片機細節:
定義的變量存儲在RAM中,對寄存器賦值時,單片機內部通過數據交換實現。
復位時 P0,P1,P2,P3寄存器全為0xff,其他各位0x00;
-
單片機
+關注
關注
6067文章
44973瀏覽量
650109 -
寄存器
+關注
關注
31文章
5433瀏覽量
124344 -
定時器
+關注
關注
23文章
3298瀏覽量
118796
原文標題:51單片機進階,處于瓶頸的你必看!
文章出處:【微信號:mcu168,微信公眾號:硬件攻城獅】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
51單片機筆記(建議收藏!)
51單片機中為什么很少出現printf的身影

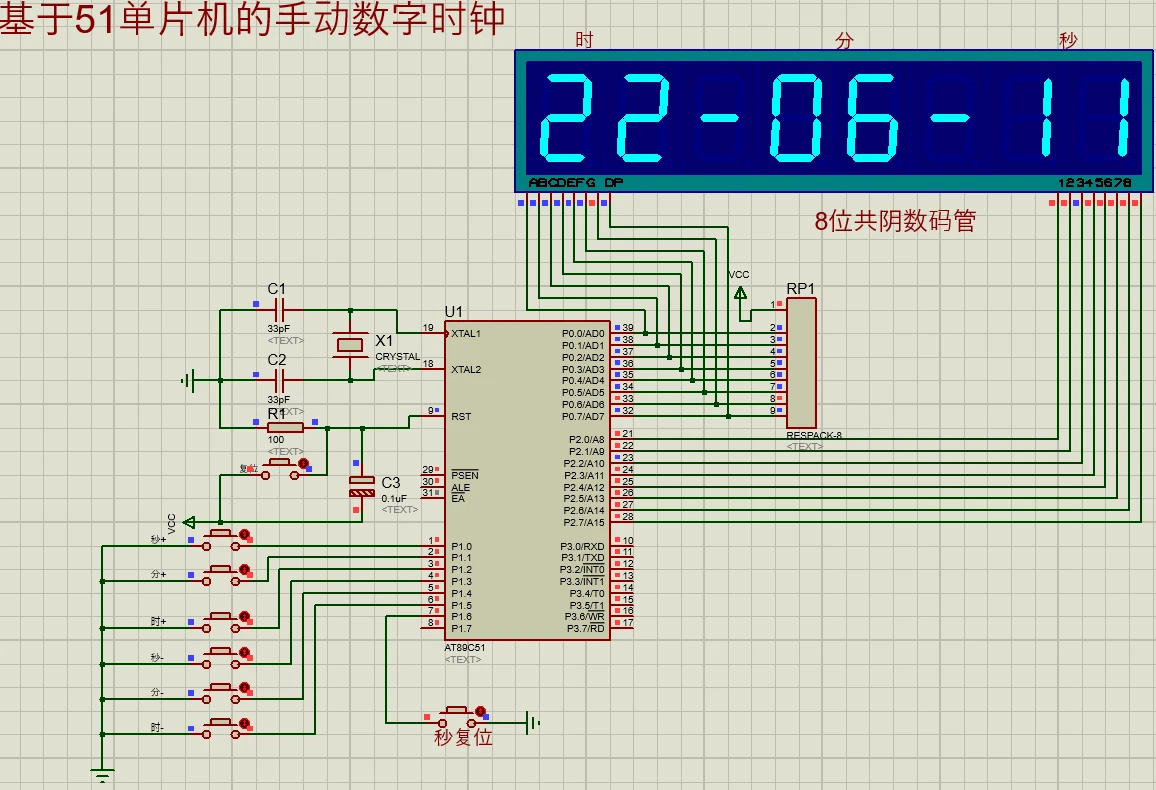
基于51單片機的手動數字時鐘
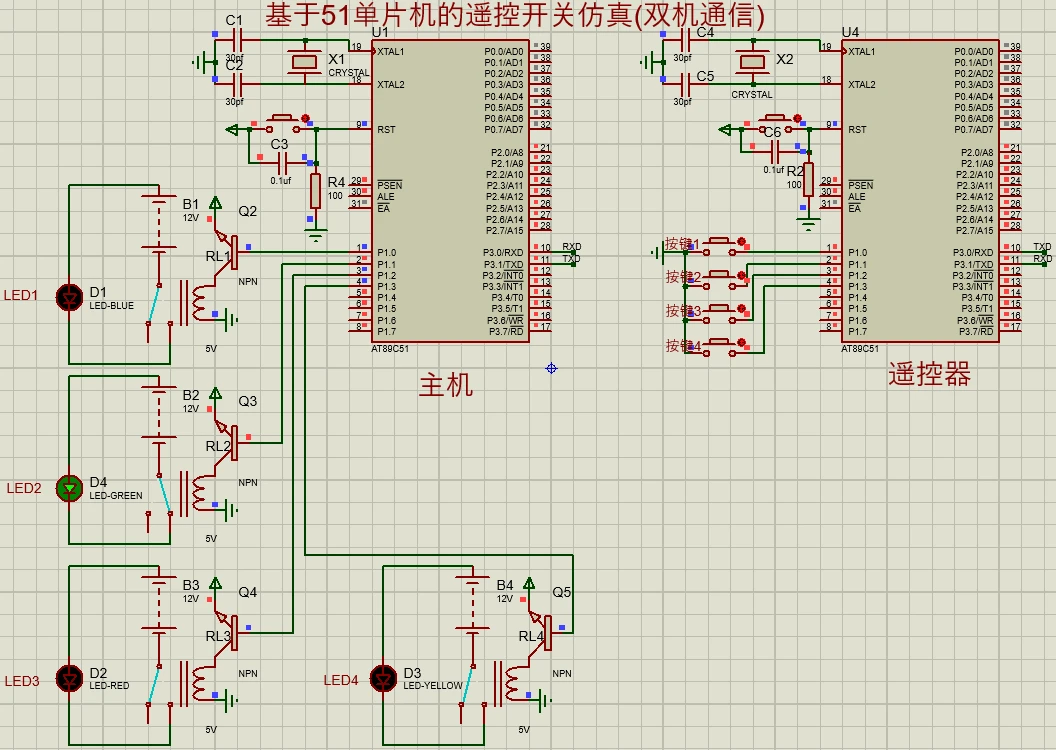
基于51單片機的遙控開關仿真(雙機通信)





 工商網監
工商網監
評論