 機器人的電機位置測量元件
機器人的電機位置測量元件

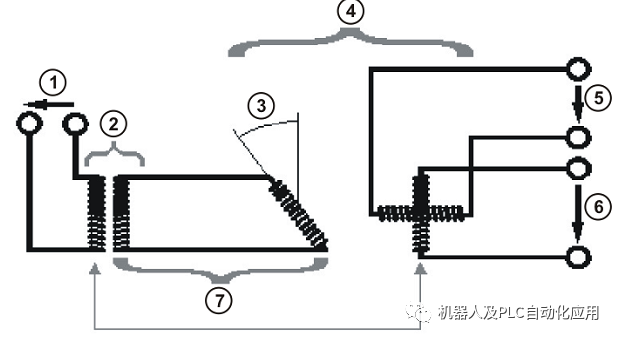
分解器:分解器用于分析處理軸的當前位置,是一種旋轉式行程測量系統。
1轉子
2定子
3 正弦線圈和余弦線圈
4 轉子線圈
5 旋轉式變壓器
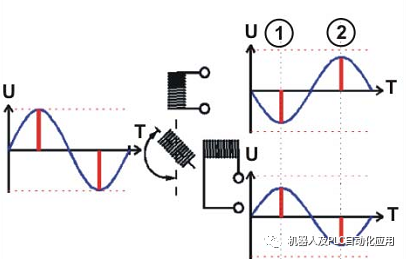
轉子 (3)通過旋轉式變壓器 (2)接受一個電壓裝置 (1)的供電 (頻率 = 8kHz)。在定子線圈 (正弦線圈和余弦線圈;5.6)內,通過感應引起與轉子位置成比例的電壓。
1 輸入電壓 (8 kHz)
2 旋轉式變壓器
3 轉子線圈
4 自動同步機
5 正弦線圈
6 余弦線圈
7 轉子
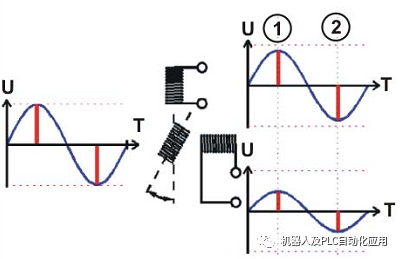
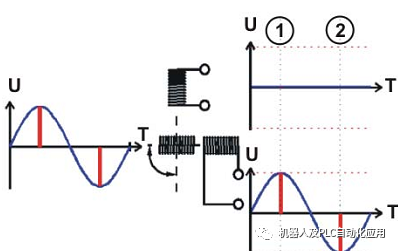
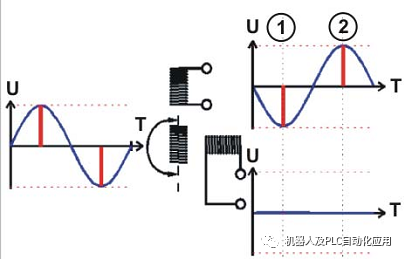
電壓隨著轉子的旋轉而變化。
感應引起的電壓在兩個測量點 (1,2)接受探測和評估。
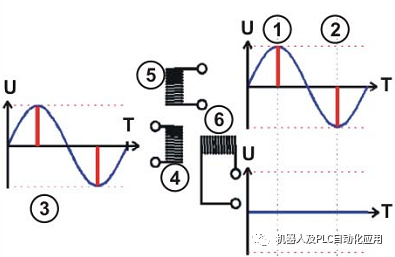
1 第一探測點
2 第二探測點
3輸入電壓
4轉子線圈
5 正弦線圈
6 余弦線圈
U 電壓
T 時間
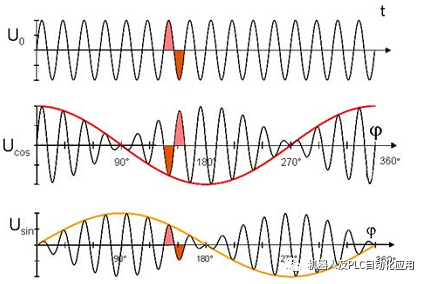
旋轉 30 度角時的分解器感應
旋轉 90 度角時的分解器感應
旋轉 135 度角時的分解器感應
旋轉 180 度角時的分解器感應
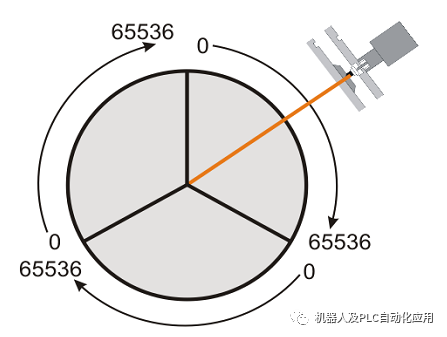
在庫卡采用的分解器中,各設有 3 個正弦線圈和余弦線圈。
這樣,電機每一圈機械式旋轉就等于分解器電旋轉 3x120 度角。
電旋轉一圈等于 65536 個增量 (16 比特)。
分解器每一圈機械式旋轉則等于 196608 個增量 (3*65536 增量)。
分解器以增量的形式提供位置數據 (16 Bit)。
這些位置數據在 RDC 內乘上一個內部演算系數,并換算成電機角度度數。
在 EDS 里,可保存每條軸的絕對位置值 (64 Bit)。
從該時間點開始,只能繼續利用電機角度值來計算。
在校準位置并非所有軸都已設為 0° 或 90°,而是準確數據已保存在機器數據里 ($mames)
$mames[n]:軸n 的機械和數學零點之間的偏移
REAL $MAMES[12]
$MAMES[1]=-20.0000
$MAMES[2]=-120.000
$MAMES[3]=110.000
$MAMES[4]=0.0
$MAMES[5]=0.0
$MAMES[6]=0.0
零點校正就是對機器人的分解器進行校準.
機器人位置在極短時間間隔內、機器人停止運行時或機器人控制系統關機時被
持續保存。
1.如果兩個數值相等,則將絕對位置應用到增量里,機器人也就準備就緒可以運行。
2.如果兩個數值存在偏差,則必須重新校準機器人。HMI 里將顯示與此相關的一條訊息.
-
機器人
+關注
關注
213文章
29706瀏覽量
212643 -
電機
+關注
關注
143文章
9290瀏覽量
149293
原文標題:機器人的電機位置測量元件
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論