") KUKA機(jī)器人8.3系統(tǒng)完成信號(hào)的控制方法
KUKA機(jī)器人8.3系統(tǒng)完成信號(hào)的控制方法

最新的8.3系統(tǒng)完成信號(hào)的控制方法
TECH4 ProzessgeraetGesamtarbeitsfertigmeldung 15 Techaufruf=EIN
VW_USR_R(#USR_MAIN,403,0,0,0,15,0,0,0,0,0,TRUE)
發(fā)出總完成信號(hào)
PAR1=0 指總完成信號(hào)
PAR4=15指總完成信號(hào)
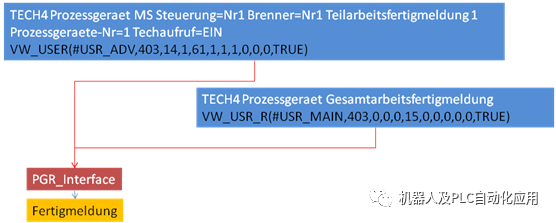
TECH4 Prozessgeraet MS Steuerung=Nr1Brenner=Nr1 Teilarbeitsfertigmeldung 1 Prozessgeraete-Nr=1 Techaufruf=EIN
VW_USR_R(#USR_MAIN,403,14,1,61,1,1,1,0,0,0,TRUE)
使用用于14指CMT的工具用機(jī)器人的完成信號(hào)1發(fā)出
PAR1=14指CMT
PAR4完成信號(hào)幾如: 1-14
PGR_Interface(#USR_TRIG,CMD_SEL,PAR1,PAR2,PAR3,PAR4,PAR5,PAR6,PAR7,PAR8,PAR9)
#USR_ADV ,#USR_MAIN沒有用.
使用#USR_TRIG 在執(zhí)行SPS時(shí)使用.
SWITCH PAR1
CASE 0 無過程裝置-----完成BMS的完成通知
IF(PAR4==15)THEN PAR4=15完成信號(hào)
FM_Nr=PAR4
FOR i=1 TO 30
IF(Hilf1_FM[i]<>Hilf2_FM[i])THEN
-這段比較的意思是之前是否已經(jīng)把完成信號(hào)發(fā)出過了( 完成信號(hào)1-14)
要是之前發(fā)過完成信號(hào)則例如:Hilf1_FM[1]=Hilf2_FM[2]
Sperre_FM15=TRUE 正常perre_FM15==FALSE
ENDIF
ENDFOR
IF(Sperre_FM15==FALSE)THEN
Fertigmeldung(FM_Nr) 發(fā)出總完成信號(hào)
ELSE
PGR_Msg(11,#QuitMsg)
ENDIF
..............
CASE 14 ;處理設(shè)備MIG / MAG(MS)
Steu_Nr=PAR2 PAR2=1 中間變量保存
Wkzg_Nr=(PAR3-60) 工具號(hào)
IF(Wkzg_Nr<1) OR (Wkzg_Nr>4)THEN
PGR_Msg(7,#QuitMsg) 工具用來激活提示信息
ENDIF
; BMS上的過程設(shè)備編號(hào)
IF(PAR4==20) OR (PAR4==21)THENPAR4==1
Proz_Nr=((((MS_BASE_SL[Steu_Nr]-BitOffset)/Byte)-15)*IdentNr)+Wkzg_Nr
SO_PGR_Geraete_Nr=Proz_Nr
進(jìn)程號(hào)SO_PGR_Geraete_Nr $OUT[97] TO $OUT[112]
ENDIF
;完成報(bào)告給BMS
IF(PAR4>=1) AND (PAR4<=14)THEN PAR4==1
FM_Nr=PAR4 完成信號(hào)=1
Hilf1_FM[PAR1]=TRUE PAR1=14
IF(FM_Nr>=1) AND (FM_Nr<=14)THEN? 完成信號(hào)FM_Nr =1
IF NOT $IN[MS_BASE_SL[Steu_Nr]+I_MS_o_Proz] THEN
MS_BASE_SL[1]=209 I_MS_o_Proz=0 如果沒有E209進(jìn)程工具不激活
Hilf2_FM[PAR1]=TRUE
Fertigmeldung(FM_Nr) Fertigmeldung(1)發(fā)出完成信號(hào)1
ELSE
PGR_Msg(9,#NotifyMsg)如果條件不滿足
ENDIF
ENDIF
ENDIF
--------------------------------------------------------

DEF Fertigmeldung(FM_Nr :IN)
INT FM_Nr,RobTimerStart,BMS_FM_QUIT
IF $FLAG[F_o_Proz_SStep] THENF_o_Proz_SStep=525,F525指不使用工具
PGR_Msg(8,#QuitMsg)提示程序信息
ELSE
RobTimerStart=$Rob_Timer激活機(jī)器人時(shí)間計(jì)算
SO_PGR_FM_Nr=FM_Nr SO_PGR_FM_Nr $OUT[33]TO$OUT[36]發(fā)出完成信號(hào)
WAITFOR((SI_PGR_FM_Nr==SO_PGR_FM_Nr) OR
(($Rob_Timer-RobTimerStart)>2000))
SI_PGR_FM_Nr $IN[33] TO $IN[36]PLC反饋完成信好
IF(($Rob_Timer- RobTimerStart)>=2000)THEN
PGR_Msg(10,#QuitMsg) 提出超時(shí)反饋完成信好故障提示
ENDIF
ENDIF
FM_Nr=0
SO_PGR_FM_Nr=FM_Nr直接給出完成信號(hào)0關(guān)閉完成信號(hào)
END
--------------------------------------------------------

GLOBALDEF PGR_LOOP()
INT i
IF($OUT[O_R_PF0]OR ($OUT[O_R_Loop_akt]AND $IN_HOME))THEN
A15機(jī)器人原位或者,A22機(jī)器人循環(huán)激活與機(jī)器人在home位(A22機(jī)器人循環(huán)沒使用)
-------重置過程設(shè)備號(hào)
SO_PGR_Geraete_Nr=0 SO_PGR_Geraete_Nr $OUT[97] TO $OUT[112]
-------重置就緒消息號(hào)
SO_PGR_FM_Nr=0 SO_PGR_FM_Nr$OUT[33] TO $OUT[36]
-------重置完成消息的變量
Sperre_FM15=FALSE
FOR i=1 TO 30 -------------初始化中間值
Hilf1_FM[i]=FALSE
Hilf2_FM[i]=FALSE
ENDFOR
ENDIF
END
-
信號(hào)
+關(guān)注
關(guān)注
11文章
2847瀏覽量
78045 -
KUKA機(jī)器人
+關(guān)注
關(guān)注
4文章
144瀏覽量
9527
原文標(biāo)題:KUKA機(jī)器人8.3系統(tǒng)完成信號(hào)的控制方法新解
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
輪式移動(dòng)機(jī)器人電機(jī)驅(qū)動(dòng)系統(tǒng)的研究與開發(fā)
盤點(diǎn)#機(jī)器人開發(fā)平臺(tái)
詳細(xì)介紹機(jī)場智能指路機(jī)器人的工作原理
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門的引路書
庫卡KUKA機(jī)器人常見故障維修
KUKA機(jī)器人編程說明(英文)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.全書概覽與第一章學(xué)習(xí)
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
《具身智能機(jī)器人系統(tǒng)》第1-6章閱讀心得之具身智能機(jī)器人系統(tǒng)背景知識(shí)與基礎(chǔ)模塊
構(gòu)建語音控制機(jī)器人 - 線性模型和機(jī)器學(xué)習(xí)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論