") 基于CA555相對(duì)延時(shí)單穩(wěn)觸發(fā)電路實(shí)現(xiàn)RS-485總線中繼器的設(shè)計(jì)
基于CA555相對(duì)延時(shí)單穩(wěn)觸發(fā)電路實(shí)現(xiàn)RS-485總線中繼器的設(shè)計(jì)
引 言
RS-485收發(fā)器采用平衡發(fā)送和差分接收,因此具有抑制共模干擾的能力;加上接收器具有高靈敏度,能檢測(cè)低達(dá)200 mV的電壓,故傳輸信號(hào)能在千米以外得到恢復(fù)。使用RS-485總線,一對(duì)雙絞線就能實(shí)現(xiàn)多站聯(lián)網(wǎng),構(gòu)成分布式系統(tǒng),且設(shè)備簡(jiǎn)單、價(jià)格低廉,能進(jìn)行長距離通信,因而得到了廣泛的應(yīng)用。由于在雙絞線上的電平損耗,RS-485標(biāo)準(zhǔn)通信的最大傳輸距離是1 200 m,因此更遠(yuǎn)距離的應(yīng)用中必須使用中繼器。網(wǎng)絡(luò)節(jié)點(diǎn)數(shù)與所選芯片驅(qū)動(dòng)能力和接收器的輸入阻抗有關(guān)。RS-485標(biāo)準(zhǔn)規(guī)定了最大總線負(fù)載為32個(gè)單位負(fù)載,若應(yīng)用中總線負(fù)載大于32個(gè)單位負(fù)載則必須使用中繼器。
1、 RS-485中繼器原理
RS-485是半雙工方式,兩線雙向傳送差分信號(hào),具有多點(diǎn)、雙向通信能力,即允許多個(gè)發(fā)送器和接收器連接到同一條總線上,傳輸線上信號(hào)的傳輸方向不定。因此,識(shí)別和控制好傳輸線上的信號(hào)傳遞方向是設(shè)計(jì)RS-485中繼器的關(guān)鍵。
RS-485標(biāo)準(zhǔn)規(guī)定:數(shù)據(jù)信號(hào)采用差分傳輸方式(differential drivel mode),也稱為“平衡傳輸”。它使用一對(duì)雙絞線,將其中一根線定義為A,另一根線定義為B,如圖1所示。
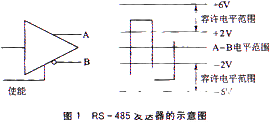
通常情況下,RS-485發(fā)送器A、B之間的正電平在+2~+6 V,是一種邏輯狀態(tài);負(fù)電平在-6~-2 V,是另一種邏輯狀態(tài)。在RS-485發(fā)送器件中,一般有一個(gè)“使能”控制信號(hào),用于控制發(fā)送器與傳輸線的切斷和連接。當(dāng)“使能”端為低電平時(shí),發(fā)送器輸出處于高阻狀態(tài),稱作“第三態(tài)”。它是有別于邏輯“1”與“0”的第三種狀態(tài)。
對(duì)于RS-485接收器,也作出與發(fā)送器相對(duì)的規(guī)定,收、發(fā)端通過平衡雙絞線將A-A與B-B對(duì)應(yīng)相連。當(dāng)在接收端A、B之間有大于+200 mV的電平時(shí),輸出為正邏輯電平;小于~200 mV時(shí),輸出為負(fù)邏輯電平。在接收器的接收平衡線上,電平范圍通常為200 mV~6 V,如圖2所示。
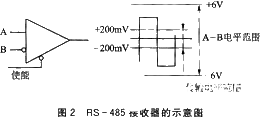
RS-485接收器同樣定義邏輯1(正邏輯電平)為B》A的狀態(tài),邏輯0(負(fù)邏輯電平)為A》B的狀態(tài),A、B之間的壓差不小于200 mV。在。RS-485接收器件中,一般也有一個(gè)“使能”控制信號(hào),用于控制接收器與傳輸線的切斷和連接。當(dāng)“使能”端為高電平時(shí),接收器與傳輸線切斷,接收器輸出為高電平;當(dāng)“使能”端為低電平時(shí),接收器輸出電平與總線信號(hào)的邏輯電平一致。
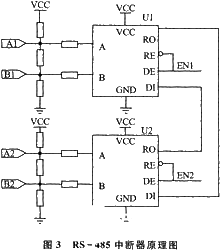
RS-485中繼器原理圖如圖3所示。正常工作時(shí)主要有三個(gè)狀態(tài):空閑狀態(tài),數(shù)據(jù)從RS-485收發(fā)器U1邊的總線往RS-485收發(fā)器U2邊的總線傳送(簡(jiǎn)稱“數(shù)據(jù)右傳狀態(tài)”),數(shù)據(jù)從RS-485收發(fā)器U2邊的總線往RS-485收發(fā)器U1邊的總線傳送(簡(jiǎn)稱“數(shù)據(jù)左傳狀態(tài)”)。
(1) 空閑狀態(tài)
當(dāng)中繼器上電啟動(dòng)運(yùn)行或總線上沒有數(shù)據(jù)傳送時(shí),中繼器工作在空閑狀態(tài)。RS-485收發(fā)器U1、U2均為接收數(shù)據(jù)狀態(tài),U1、U2的EN1、EN2引腳均為低電平。
(2) 數(shù)據(jù)右傳狀態(tài)
當(dāng)RS-485收發(fā)器U1邊檢測(cè)到連接其A、B引腳總線上的差動(dòng)信號(hào)有數(shù)據(jù)向右邊傳送時(shí),它通過RS-485收發(fā)器U1的RO引腳以RS-232的方式逐位接收數(shù)據(jù),并通過。RS-485收發(fā)器U2的DI引腳以RS-232的方式逐位輸出數(shù)據(jù)。傳送順序?yàn)橄葌饕粋€(gè)低電平起始位,再傳8位數(shù)據(jù)位,最后傳1位高電平結(jié)束位,為一數(shù)據(jù)幀,此段時(shí)間U2的EN2引腳應(yīng)為高電平。此后U2將一直輸出高電平直到下一幀數(shù)據(jù)到來之前,U2的EN2引腳也應(yīng)為低電平且處于接收狀態(tài)。
(3) 數(shù)據(jù)左傳狀態(tài)
數(shù)據(jù)左傳狀態(tài)的過程與數(shù)據(jù)右傳狀態(tài)一致,只是在一數(shù)據(jù)幀時(shí)間段內(nèi)U2的EN2引腳應(yīng)為高電平。
當(dāng)總線上干擾較大時(shí)也有可能發(fā)生總線沖突,數(shù)據(jù)右傳狀態(tài)和數(shù)據(jù)左傳狀態(tài)同時(shí)發(fā)生。此時(shí),總線上的信號(hào)是無效的,但總線沖突(總線雙方同時(shí)活動(dòng))并不需要中繼器來處理和解決,而是由通信協(xié)議來處理和防止的。要求總線沖突(或干擾)結(jié)束后,RS-485中繼器的方向控制器總能自動(dòng)恢復(fù)正常工作。
2、 幾種RS-485中繼器
現(xiàn)有的RS-485中繼器通常采用三種方法來實(shí)現(xiàn):①采用RC充放電延時(shí)與RS觸發(fā)器的配合來控制RS-485芯片的數(shù)據(jù)收發(fā)方向;②采用單片機(jī)的定時(shí)器定時(shí)控制RS-485接口收發(fā)方向;③采用單片機(jī)串口監(jiān)視總線上的數(shù)據(jù),通過查表當(dāng)數(shù)據(jù)送給本中繼器下的終端時(shí)才開啟數(shù)據(jù)傳輸通道。
第一種方法的缺點(diǎn)是采用電阻、電容組成延時(shí)電路。由于電阻或電容本身的誤差,運(yùn)行一段時(shí)間后電子器件老化產(chǎn)生的誤差以及溫度的變化,都會(huì)影響延時(shí)的準(zhǔn)確性,而且這種中繼器要求兩個(gè)字節(jié)之間的通信時(shí)間間隔必須大于一個(gè)字節(jié)數(shù)據(jù)的通信時(shí)間才能確保不丟失數(shù)據(jù),因此降低了通信速率。
第二、三種方法的缺點(diǎn)是采用單片機(jī)的中斷來檢測(cè)數(shù)據(jù)幀的起始位。單片機(jī)的中斷響應(yīng)須要一段時(shí)間,RS-485總線一個(gè)數(shù)據(jù)位的時(shí)間寬度應(yīng)大于單片機(jī)的中斷響應(yīng)時(shí)間,終端處理器才能檢測(cè)每數(shù)據(jù)幀的起始位,所以此兩種方法的通信速率也受到限制。特別是第三種方法中,單片機(jī)要通過對(duì)總線上通信內(nèi)容的監(jiān)聽進(jìn)行相應(yīng)查表來決定本中繼器后面的總線是否與前面的總線連接。這種方法的缺點(diǎn)是要對(duì)總線的通信內(nèi)容進(jìn)行處理,這不僅降低了通信的實(shí)時(shí)性,而且還增加了系統(tǒng)通信協(xié)議的復(fù)雜性,降低了RS-485總線通信的可靠性。
3、 波特率自適應(yīng)RS-485中繼器
在工業(yè)現(xiàn)場(chǎng)應(yīng)用中,RS-485總線的通信速度一般為2 400~115 200 bps,以前設(shè)計(jì)的RS-485中繼器控制RS-485收發(fā)器收發(fā)狀態(tài),以一數(shù)據(jù)幀時(shí)間寬度為單元。不同的波特率,控制RS-485收發(fā)器收發(fā)狀態(tài)的時(shí)間寬度也不同,所以RS-485總線的通信速度不同,需設(shè)置控制RS-485收發(fā)器收發(fā)狀態(tài)的時(shí)間寬度,以適應(yīng)所應(yīng)用RS-485總線的通信速度。
波特率自適應(yīng)RS-485中繼器的設(shè)計(jì)思路是:控制RS-485收發(fā)器收發(fā)狀態(tài),以一數(shù)據(jù)位時(shí)間寬度為單元。若控制RS-485收發(fā)器收發(fā)狀態(tài)時(shí)間寬度適應(yīng)任意波特率的一數(shù)據(jù)位時(shí)間寬度,則RS-485中繼器適應(yīng)任意RS-485總線的通信速度。為此設(shè)計(jì)波特率自適應(yīng)RS-485中繼器,如圖4所示。
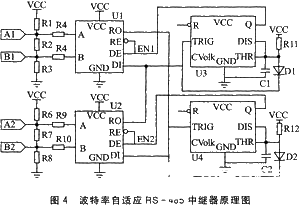
U3、U4為由CA555組成的相對(duì)延時(shí)單穩(wěn)觸發(fā)電路,分別控制RS-485中繼器數(shù)據(jù)左、右傳狀態(tài)。相對(duì)延時(shí)單穩(wěn)觸發(fā)電路是在由CA555組成的普通單穩(wěn)觸發(fā)電路的基礎(chǔ)上增加了二極管D1和D2。當(dāng)CA555輸入引腳TRIG為低電平時(shí),CA555內(nèi)部和二極管D1、D2將RC延時(shí)電路放電,輸出Q端輸出高電平;當(dāng)CA555輸入引腳TRIG變?yōu)楦唠娖綍r(shí),CA555內(nèi)部和二極管D1、D2開始使RC延時(shí)電路充電,延時(shí)一段時(shí)間(與R×C有關(guān)),輸出Q端輸出低電平。其輸入、輸出信號(hào)時(shí)序如圖5所示。
圖5中,TRIG為CA555的輸入信號(hào);Q為CA555的輸出信號(hào);Tw為單個(gè)或連續(xù)低電平數(shù)據(jù)位的時(shí)間寬度;Trc為U3、U4組成的單穩(wěn)觸發(fā)電路中R11×C1(或R12×C2)決定的延時(shí)時(shí)間寬度,選擇小于RS-485總線最高波特率(如115 200 bps)的數(shù)據(jù)位的時(shí)間寬度為宜。在本設(shè)計(jì)中,控制RS-485收發(fā)器收發(fā)狀態(tài)的時(shí)間寬度始終比總線中傳輸數(shù)據(jù)低電平寬度大Trc,而且Trc不會(huì)大于任何波特率的一個(gè)數(shù)據(jù)位的時(shí)間寬度。所以本文設(shè)計(jì)的波特率自適應(yīng)RS-485中繼器適應(yīng)于工業(yè)現(xiàn)場(chǎng)應(yīng)用RS-485總線的任意通信速度。
由于波特率自適應(yīng)RS-485中繼器以一數(shù)據(jù)位時(shí)間寬度為單元,所以只有傳輸?shù)碗娖綌?shù)據(jù)位時(shí),輸出端RS-485收發(fā)器的輸出使能才打開,并輸出低電平。當(dāng)傳輸高電平數(shù)據(jù)位時(shí),輸出端RS-485收發(fā)器的輸出使能關(guān)閉,RS-485收發(fā)器的輸出為高阻狀態(tài)。所以,在每端RS-485收發(fā)器的輸出端需增加上拉電阻、下拉電阻和匹配電阻構(gòu)成的偏置電路,當(dāng)輸出為高阻狀態(tài)時(shí),在匹配電阻上形成表示高電平的差分信號(hào)并輸出。
為提高波特率自適應(yīng)RS-485中繼器的可靠性,可將U3的輸出端經(jīng)一反相器與U4的低電平有效的復(fù)位端R連接;將U4的輸出端經(jīng)一反相器與U3的低電平有效的復(fù)位端R連接。這樣,當(dāng)從RS-485中繼器的一側(cè)向另一側(cè)傳輸數(shù)據(jù)時(shí),消除了同時(shí)向相反方向傳輸數(shù)據(jù)的可能性。
當(dāng)總線上干擾較大時(shí)也有可能發(fā)生總線沖突,數(shù)據(jù)右傳狀態(tài)和數(shù)據(jù)左傳狀態(tài)同時(shí)發(fā)生。由于實(shí)際電路的不完全對(duì)稱,波特率自適應(yīng)RS-485中繼器只能向一個(gè)方向傳輸數(shù)據(jù),并且當(dāng)總線沖突(或干擾)結(jié)束后,中繼器處于空閑狀態(tài),即中繼器兩端的收發(fā)器均處于接收狀態(tài)。
4 、結(jié) 論
本文提出了由CA555組成的相對(duì)延時(shí)單穩(wěn)觸發(fā)電路,并應(yīng)用于RS-485總線中繼器的設(shè)計(jì)中。它使得RS-485收發(fā)器的數(shù)據(jù)發(fā)送狀態(tài)只由RS-485中繼器接收數(shù)據(jù)端數(shù)據(jù)的一個(gè)或連續(xù)多個(gè)低電平位來控制,與一數(shù)據(jù)位時(shí)間寬度無關(guān),即與總線傳輸數(shù)據(jù)的波特率無關(guān),所以本文設(shè)計(jì)的RS-485總線中繼器自適應(yīng)任何波特率數(shù)據(jù)的RS-485總線中繼傳輸。實(shí)踐證明,該波特率自適應(yīng)RS-485中繼器是可靠的。
責(zé)任編輯:gt
-
收發(fā)器
+關(guān)注
關(guān)注
10文章
3508瀏覽量
106330 -
接收器
+關(guān)注
關(guān)注
14文章
2482瀏覽量
72336 -
總線
+關(guān)注
關(guān)注
10文章
2909瀏覽量
88513
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
RS232/RS485不限距離和節(jié)點(diǎn)
推薦個(gè)單片機(jī)和485芯片來設(shè)計(jì)RS485中繼器
RS-485雙隔離式半雙工中繼器參考設(shè)計(jì)
如何實(shí)現(xiàn)RS-485中繼器的設(shè)計(jì)?
怎么實(shí)現(xiàn)RS-485數(shù)據(jù)速率獨(dú)立型半雙工中繼器的設(shè)計(jì)?
如何利用CA555相對(duì)延時(shí)單穩(wěn)觸發(fā)電路實(shí)現(xiàn)RS-485總線中繼器的設(shè)計(jì)?
雙路隔離式半雙工RS-485中繼器參考設(shè)計(jì)
RS-485中繼器原理圖
RS-485數(shù)據(jù)速率獨(dú)立型半雙工中繼器設(shè)計(jì)
RS-485總線標(biāo)準(zhǔn)及幾種常見的RS-485接口電路介紹
RS485中繼器介紹
RS-485 數(shù)據(jù)速率獨(dú)立型半雙工中繼器設(shè)計(jì)詳析
UG-1266:使用ADM2587E 2.5 kV rms信號(hào)和帶±15 kV ESD保護(hù)的電源隔離RS-485/RS-422收發(fā)器評(píng)估隔離RS-485中繼器

AN-1458:具備自動(dòng)方向控制功能的隔離式RS-485中繼器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論