") 采用NB-IOT通信技術(shù)的泊車位傳感器節(jié)點(diǎn)設(shè)計(jì)方案
采用NB-IOT通信技術(shù)的泊車位傳感器節(jié)點(diǎn)設(shè)計(jì)方案
目前,國內(nèi)外主要采用感應(yīng)線圈、視頻分析、紅外感應(yīng)和無線地磁感應(yīng)等停車位檢測技術(shù)。有學(xué)者提出采用433M無線通信技術(shù)進(jìn)行車位數(shù)據(jù)的傳輸,并通過4G 通信將停車場各車位的信息上報(bào)網(wǎng)絡(luò)平臺(tái),該方案的局 限在于增加了系統(tǒng)的復(fù)雜度以及限制了下掛數(shù)量。也有國外學(xué)者提出利用智能手機(jī)和通信網(wǎng)絡(luò)實(shí)現(xiàn)停車位管理的方案,通過手機(jī)自帶的傳感器判斷車輛在停車場內(nèi)的行駛狀態(tài),利用蜂窩網(wǎng)絡(luò)結(jié)合停車場分布的WI-FI信號(hào)對(duì)車輛停放的具體車位進(jìn)行定位,在網(wǎng)絡(luò)平臺(tái)上進(jìn)行統(tǒng)一管理和計(jì)費(fèi),該方案由于定位精度低,對(duì)停放車輛的間距要求大,不利于實(shí)際應(yīng)用。
在物聯(lián)網(wǎng)技術(shù)迅猛發(fā)展的背景下,筆者設(shè)計(jì)并實(shí)現(xiàn)了一種采用 NB-IOT 無線通信技術(shù)和三軸磁力檢測技術(shù)的泊車位傳感節(jié)點(diǎn),該泊車位傳感節(jié)點(diǎn)具有架設(shè)方便、下掛數(shù)量大和檢測靈敏等特點(diǎn)。
1 系統(tǒng)結(jié)構(gòu)
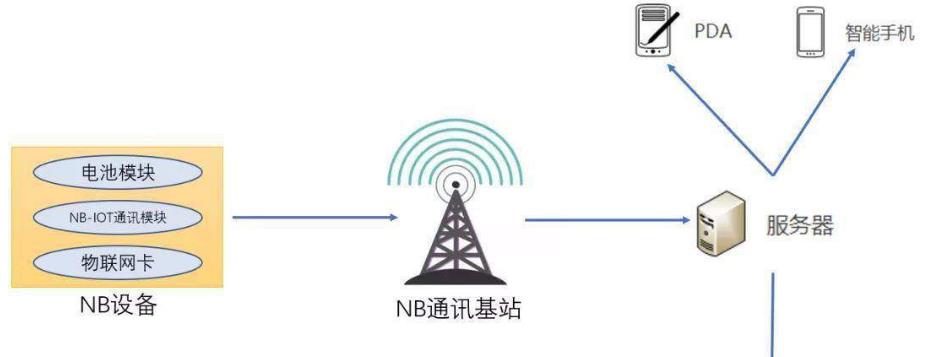
泊車位檢測系統(tǒng)的總體結(jié)構(gòu)如圖1所示,該系統(tǒng)總體分為感知層、通信傳輸層和應(yīng)用層。感知層:在各車位上部署了采用 NB-IOT 通信技術(shù)的泊車位傳感器節(jié)點(diǎn),負(fù)責(zé)采集車位當(dāng)前的磁場數(shù)據(jù),通過分析磁場數(shù)據(jù)得到當(dāng)前車位的狀態(tài),并將車位狀態(tài)信息通過 NB-IOT 模組,發(fā)送到 NB-IOT 基站;通信傳輸層:主要承擔(dān) NB-IOT 節(jié)點(diǎn)的鏈路分配以及車位管理數(shù)據(jù)的收發(fā)任務(wù),并提供相應(yīng)服務(wù)的接口供泊車位管理系統(tǒng)調(diào)用;應(yīng)用層:基于 B/S架構(gòu)的泊車位管理系統(tǒng)服務(wù)器部署于云端,通過 NB-IOT平臺(tái)提供的接口與各車位傳感節(jié)點(diǎn)進(jìn)行交互,用戶可以通過手機(jī)、PC機(jī)等終端設(shè)備查看和管理車位的實(shí)時(shí)狀態(tài)。
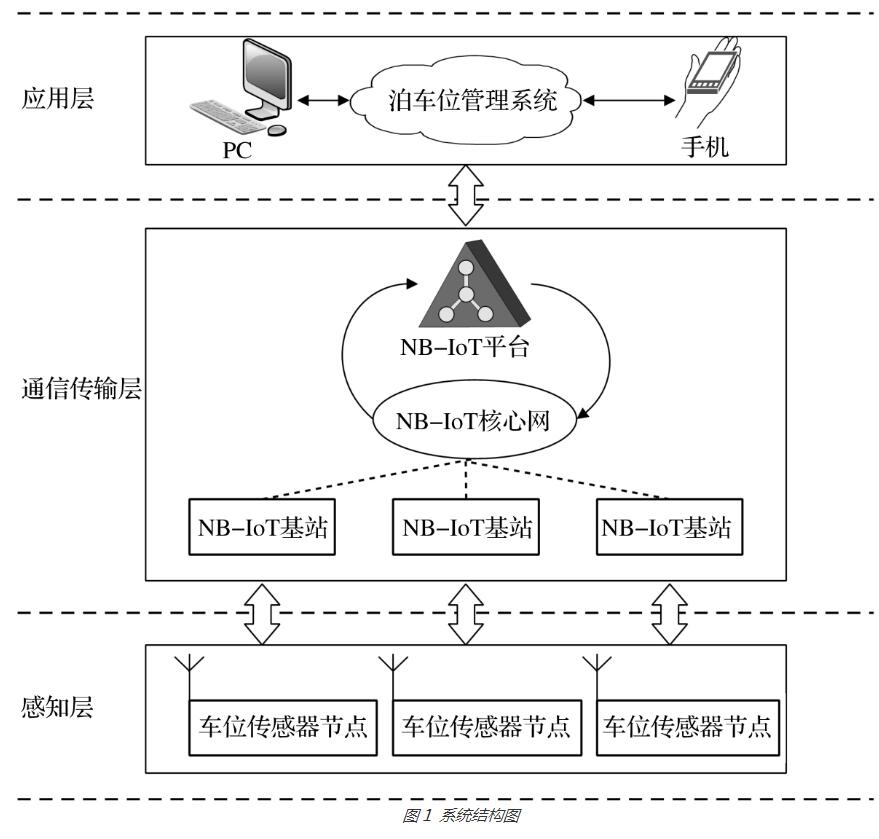
圖1 系統(tǒng)結(jié)構(gòu)圖
WSN 環(huán)境下泊車位傳感器節(jié)點(diǎn)的設(shè)計(jì),通信方式上采用 NB-IOT 通信技術(shù),中文名窄帶物聯(lián)網(wǎng),NB-IOT 通信技術(shù)是物聯(lián)網(wǎng)領(lǐng)域的新興技術(shù),具有覆蓋能力強(qiáng)、超低功耗、部署成本低廉、下掛數(shù)量大、無需額外架設(shè)網(wǎng)關(guān)或集中器等特點(diǎn),檢測方式上采用基于 MEMS封裝技術(shù)的三軸磁力傳感器,該傳感器功耗低,檢測靈敏,不易受到天氣、空氣濕度等環(huán)境因素的影響,具有體積小巧、部署方便的特點(diǎn),可以有效避免自行車、電動(dòng)車等非機(jī)動(dòng)車輛及行人的干擾。
2車位檢測原理
地球磁場是一個(gè)平均強(qiáng)度較為恒定的弱磁場, 在沒有施加外部磁場的情況下,地球磁場的數(shù)值會(huì)在某一個(gè)數(shù)值上下緩慢地變化。當(dāng)有鐵磁性的物體進(jìn)入磁場的時(shí)候,由于磁性物體的作用,物體周圍的地磁場會(huì)發(fā)生一定的擾動(dòng)。而車輛是具有大量金 屬的鐵磁物體,測試結(jié)果驗(yàn)證:汽車的發(fā)動(dòng)機(jī)部位、前軸部分和后軸部分的金屬密度最大,能夠引起的 磁場擾動(dòng)也最為顯著。
本設(shè)計(jì)采用基于AMR檢測技術(shù)的三軸磁力傳感器,在芯片的內(nèi)部各個(gè)軸向封裝了對(duì)磁場變化十分敏感的由鐵鎳合金組成的電橋電路,可以同時(shí)檢測 X,Y,Z 軸方向上的磁場變化。若車位傳感器放置于車輛的下方,并以 Z 軸朝上,一旦有車輛駛?cè)胲囄唬?軸朝向上的磁場變化最為明顯,因此可主要考察Z 軸磁場數(shù)據(jù)的變化,并以其他軸向磁場變化作為輔助來判斷當(dāng)前車位的狀態(tài)。
圖2(a)顯示車輛駛?cè)胲囄粫r(shí)引起傳感器上方Z軸磁場變化的測試曲線,圖2(b)顯示車輛駛離車位時(shí)引起傳感器上方 Z 軸磁場變化的測試曲線。由測試結(jié)果可知:車輛駛?cè)牒碗x開停車位的過程中,Z軸的變化是一個(gè)較為規(guī)律且近似可逆的動(dòng)態(tài)過程。
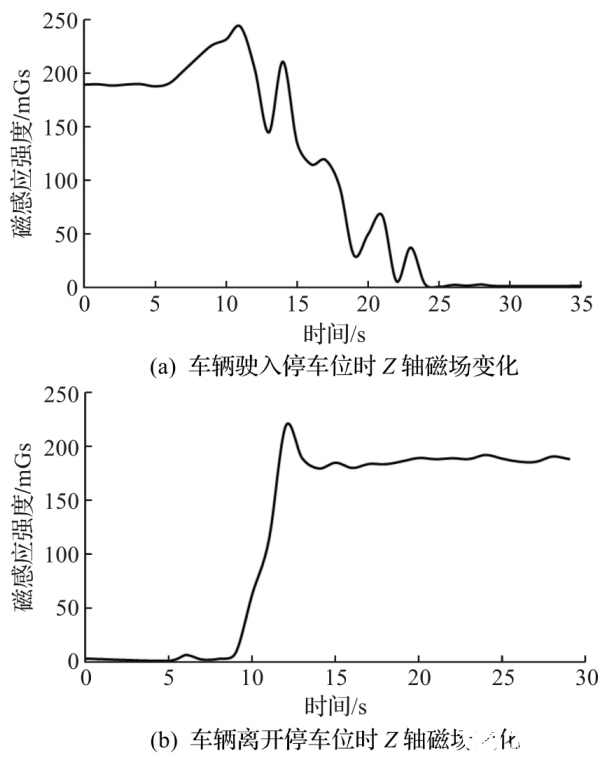
圖2 車輛動(dòng)作引起的磁場擾動(dòng)測試結(jié)果
3 車位傳感器節(jié)點(diǎn)電路設(shè)計(jì)
車位傳感器節(jié)點(diǎn)主要由微控制器(MCU)、三軸磁力傳感芯片、存儲(chǔ)芯片、NB-IOT 模組、NB-SIM 卡、外置 PCB天線以及鋰電池七部分組成。三軸磁力傳感器芯片作為傳感器節(jié)點(diǎn)的感知部分,負(fù)責(zé)車位磁場檢測,并通過內(nèi)置的 A/D 轉(zhuǎn)換模塊將磁阻電路感應(yīng)到的電信號(hào)轉(zhuǎn)換為數(shù)字信號(hào),通過SPI接口與 MCU 進(jìn)行數(shù)據(jù)交互,同時(shí)三軸磁力傳感器芯片可以通過中斷輸出引腳 及DRDY 引腳來喚醒 MCU,提醒 MCU 有新的磁場數(shù) 據(jù)生成或磁場變化超出設(shè)定的閾值。MCU 電路是整個(gè)傳感器節(jié)點(diǎn)的中心部分,主要負(fù)責(zé)進(jìn)一步處理由SPI接口發(fā)送過來的三軸磁場數(shù)據(jù),通過這些數(shù)據(jù)判斷所 在車位的車輛占用情況以及傳感節(jié)點(diǎn)的低功耗配置, 同時(shí) MCU 通過 USART 串口與 NB-IOT 通信模組通信,發(fā)送相應(yīng)的 AT 指令控制泊車位數(shù)據(jù)的無線收發(fā)以及 NB-IOT 模組的喚醒。NB-IOT 模組、NB-SM 卡以及外置PCB 天線,作為車位傳感器節(jié)點(diǎn)的通信傳輸部分,主要負(fù)責(zé)車位傳感器節(jié)點(diǎn)與泊車位管理系統(tǒng)之間的通信、泊車位狀態(tài)信息的發(fā)送以及管理系統(tǒng)下發(fā)命令的接收,NB-SM 卡為 NB-IOT 模組提供相應(yīng)的 NB數(shù)據(jù)流量套餐,為了保證信號(hào)接收的強(qiáng)度,選用外置PCB天線,通過天線良好的信號(hào)增益和方向性來保證泊車位傳感器節(jié)點(diǎn)數(shù)據(jù)的穩(wěn)定收發(fā)。鋰電池電源保障傳感器節(jié)點(diǎn)長時(shí)間續(xù)航。傳感器總體結(jié)構(gòu)框架如圖3所示。
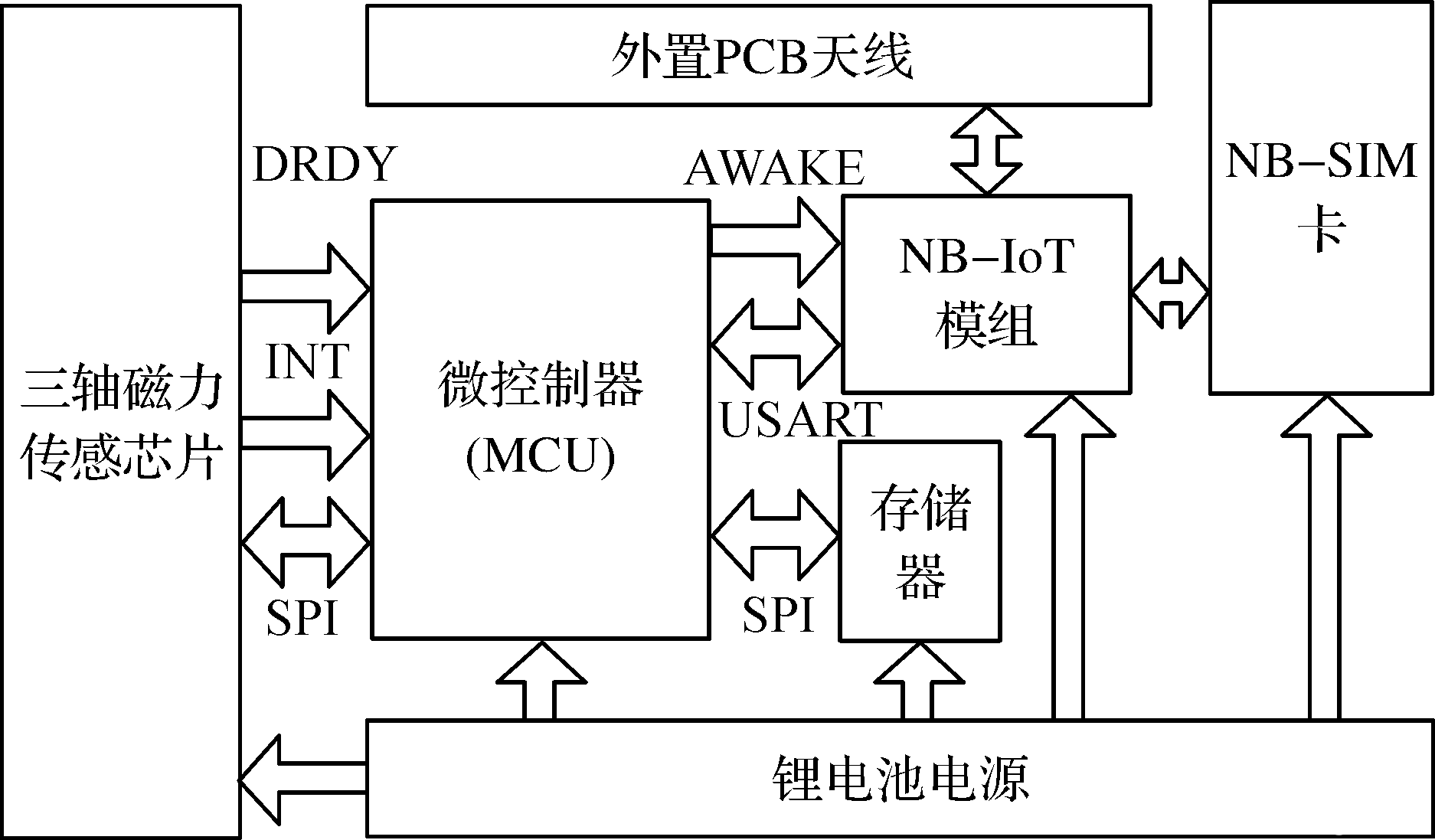
圖3 車位傳感器硬件結(jié)構(gòu)圖
3。1 三軸磁力傳感器電路
三軸磁力傳感芯片選用ST 公司近年推出的采用 LGA-20封裝的高性能超低功耗系列新型獨(dú)立式微型傳感器 LIS3MDL,原理如圖4 所示。傳感器可測量3 個(gè)軸6 個(gè)方向上的磁感應(yīng)強(qiáng)度,數(shù)據(jù)輸出長度為16 位,根據(jù)不同的測量需求,測量范圍可在±4,±8,±12,±16Gs等4 個(gè)檔位中選擇,支持 I2C 和 SPI兩種通訊方式。經(jīng)過實(shí)際測試,測得當(dāng)配置傳感器 ODR 為0.625 Hz,且在超低功耗連續(xù)檢測模式下運(yùn)行時(shí),工作電流僅5μA,滿足車位傳感節(jié)點(diǎn)超長續(xù)航的工作需求。
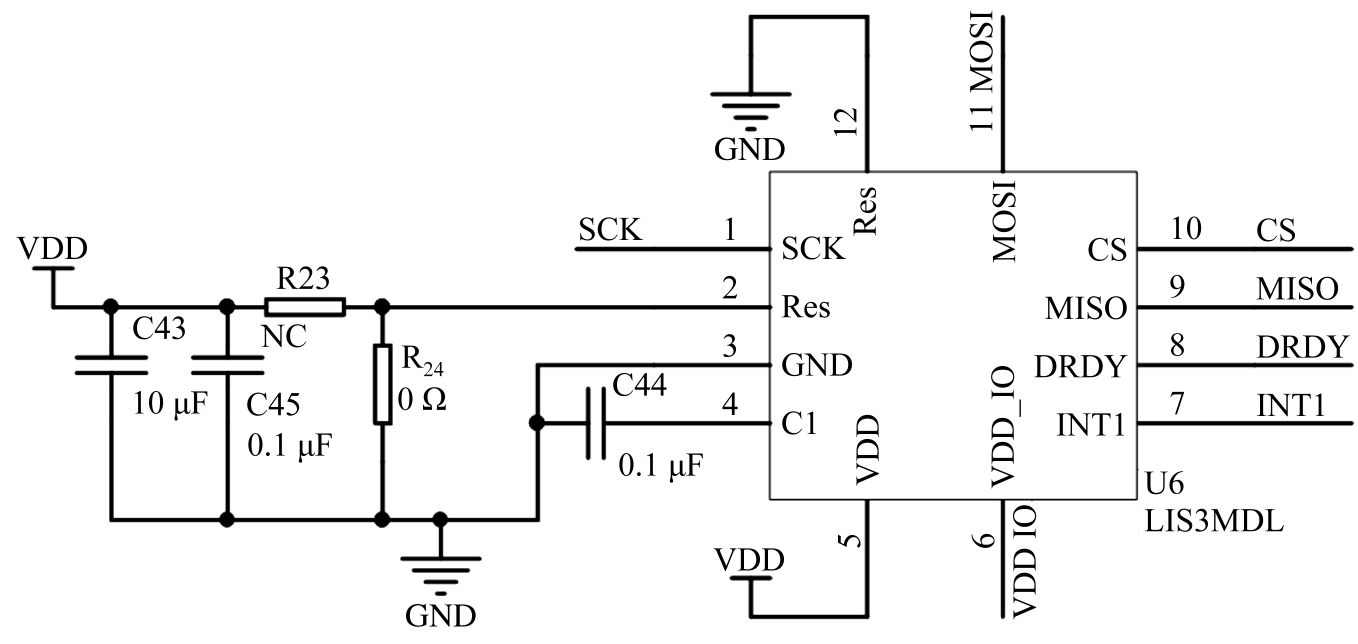
圖4 三軸磁力傳感器電路圖
磁力傳感器通過周期性測量停車位區(qū)域地磁場的變化來感知鐵磁物體的存在,當(dāng)車輛在地磁傳感器附近出現(xiàn)時(shí),磁力傳感器模塊檢測停車位地磁場變化并進(jìn)行數(shù)據(jù)采樣,并將這些數(shù)據(jù)通過 SPI接口發(fā)送給 MCU 進(jìn)行處理分析。
3。2 NB-IOT 模組電路
NB-IOT 模組選用 NB05-01 模組,內(nèi)嵌全球領(lǐng)先的窄帶物聯(lián)網(wǎng)無線通信模塊,其原理如圖5所示。采用半雙工FDD 通訊方式,工作頻段為850 MHz,模塊符合3GPP 標(biāo)準(zhǔn)中的頻段要求,具有體積小、功耗低、傳輸距離遠(yuǎn)和抗干擾能力強(qiáng)等特點(diǎn),在 PSM 模式下運(yùn)行電流僅5μA。
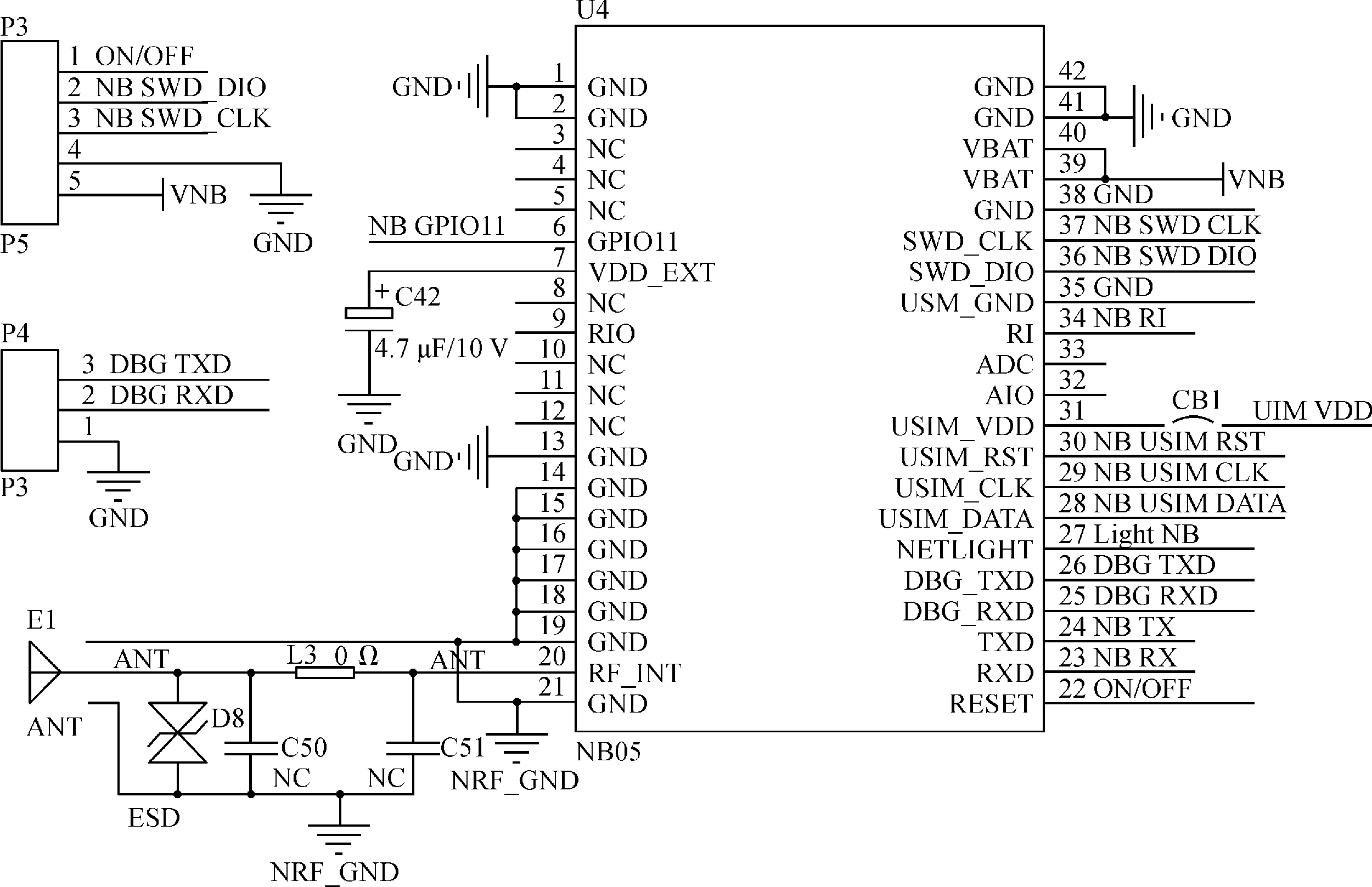
圖5 NB-IOT 模組電路圖
3。3 NB-SIM 卡座電路
NB 卡使用的是中國電信提供的10649 NB 專用卡,目前主要有插卡和貼片卡兩種形式,本設(shè)計(jì)采用的是 Micro卡座插卡的形式,其原理如圖6所示。
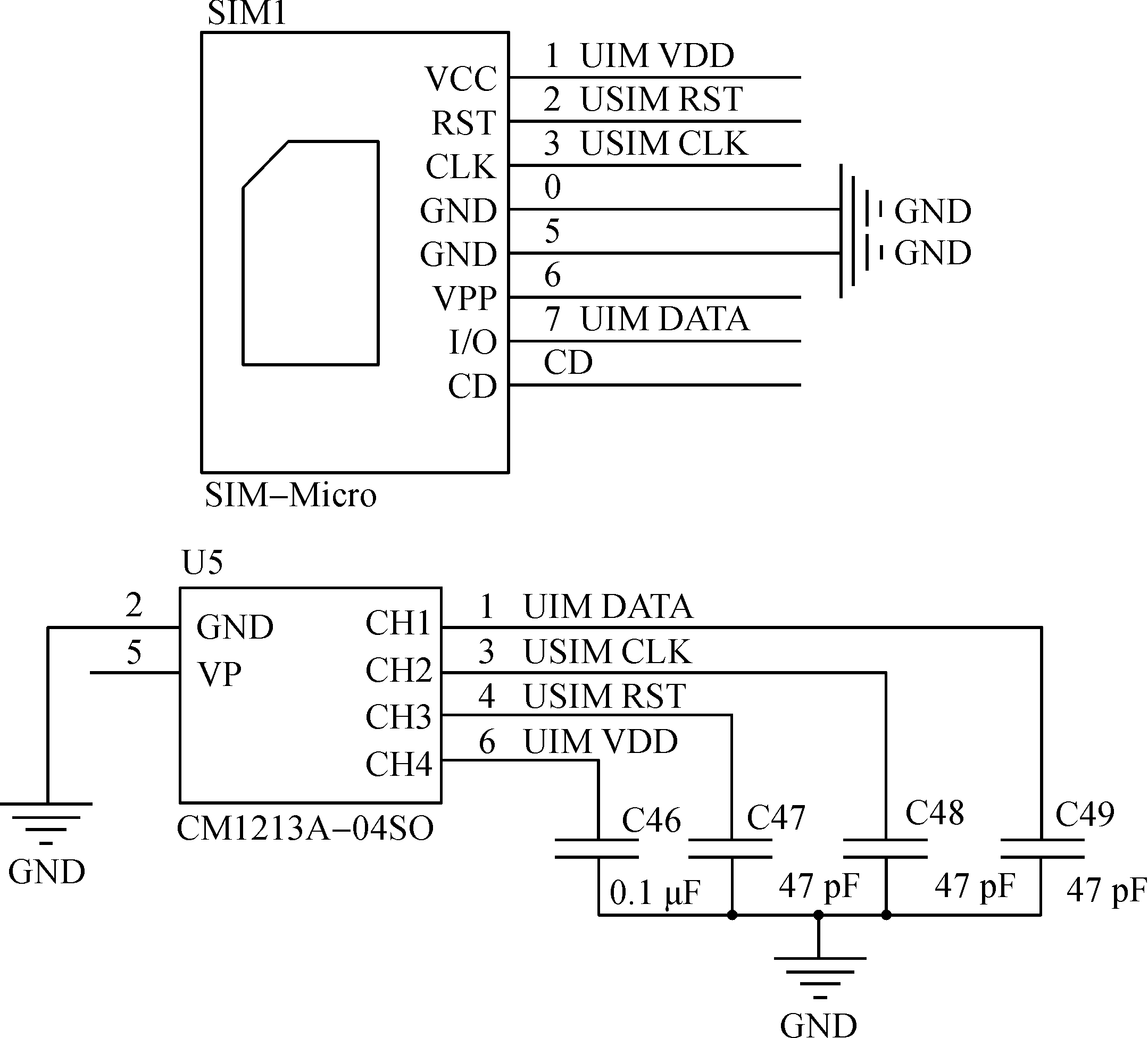
圖6 NB-SIM 卡電路圖
為保證 NB 卡與 NB-IOT 模組的穩(wěn)定運(yùn)行,在卡的各個(gè)引腳添加 ESD 防靜電保護(hù),ESD 采用 CM1213系列的 TVS管集成芯片,以增強(qiáng)所設(shè)計(jì)的傳感節(jié)點(diǎn)通信部分的抗干擾能力。
3。4 MCU 電路
MCU 部分選用 ST 公司推出的的超低功耗系列單片機(jī) STM32L151C8T6,該 MCU 基于 32 位 Cortex-M3內(nèi)核,低功耗工作模式下電流僅11μA,在低功耗睡眠模式下功耗可低至4.6μA,可勝任車位傳感器所需的低功耗設(shè)計(jì)。MCU 部分電路圖如圖7所示,該部分主要負(fù)責(zé)地磁傳感器數(shù)據(jù)的預(yù)處理及分析,并結(jié)合獲取的地磁場數(shù)據(jù)進(jìn)行車位狀態(tài)判斷、控制 NB-IOT 模組進(jìn)行無線數(shù)據(jù)傳輸、節(jié)點(diǎn)自身狀態(tài)監(jiān)測及預(yù)警等。
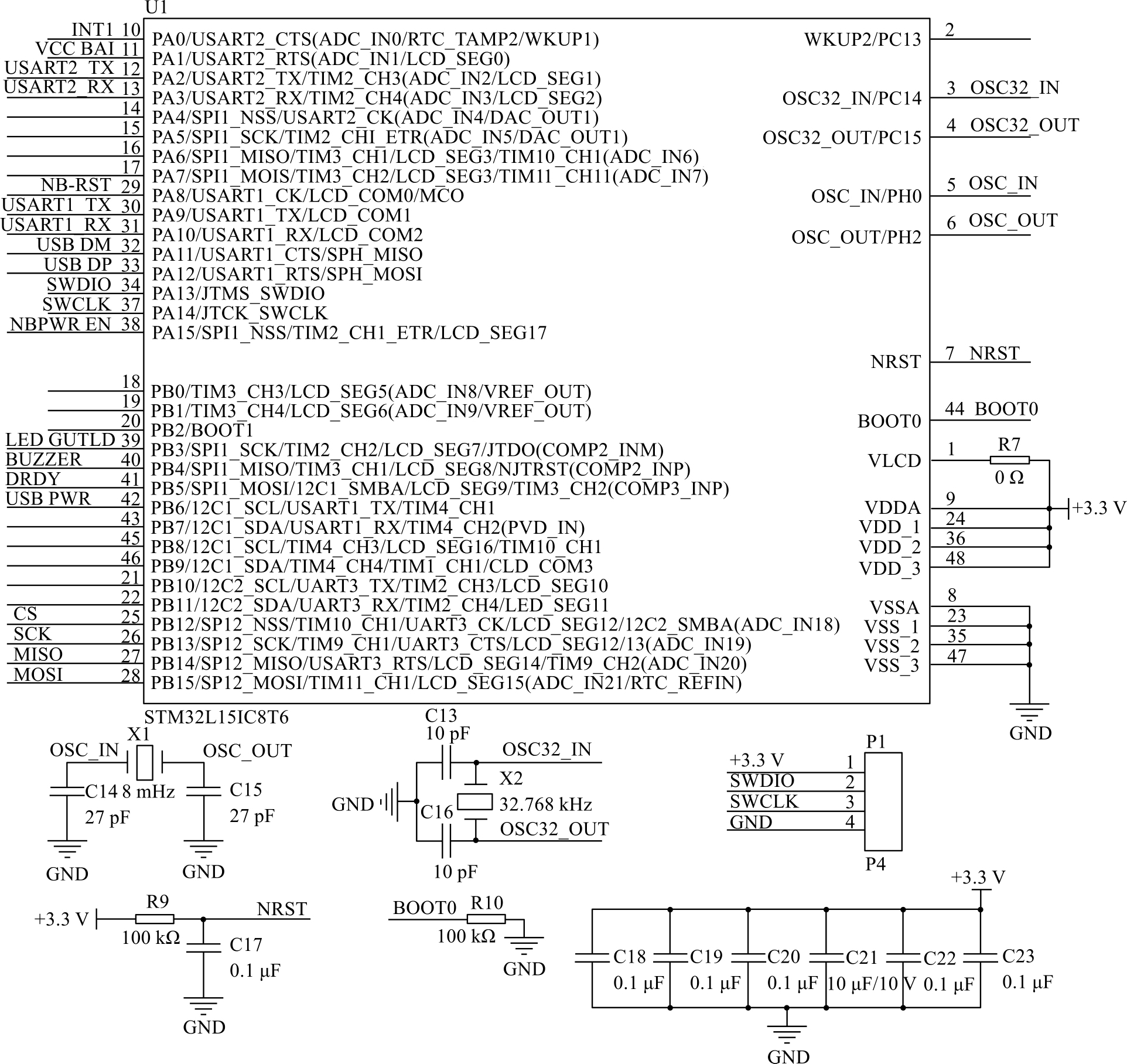
圖7 MCU 電路圖
3。5 射頻天線(RF)電路
天線部分是決定傳感節(jié)點(diǎn)數(shù)據(jù)通信效果的關(guān)鍵一環(huán),所設(shè)計(jì)的 RF走線應(yīng)滿足50 Ω 阻抗匹配,印刷線路板(PCB)走線阻抗因素主要與銅厚、布線寬度、布線間距以及PCB 使用的板材有關(guān),即

式中:εr 為PCB板材的介電常數(shù);t為PCB走線銅的厚度;h為微帶線的介質(zhì)厚度;W 為PCB走線的寬度。由 式(1)可見:PCB走線的阻抗Z 與板材介質(zhì)厚度成正比,與εr,W 和t成反比。因此,在模組進(jìn)行PCB設(shè)計(jì)時(shí)也需根據(jù)PCB加工廠商的工藝進(jìn)行設(shè)計(jì)調(diào)整,使天線各部分走線滿足50Ω 阻抗匹配。結(jié)合PCB廠家的工藝標(biāo)準(zhǔn),設(shè)計(jì)出的 RF 走線經(jīng)仿真驗(yàn)證,結(jié)果顯示設(shè)計(jì)能較好滿足阻抗匹配的要求,如圖8所示。
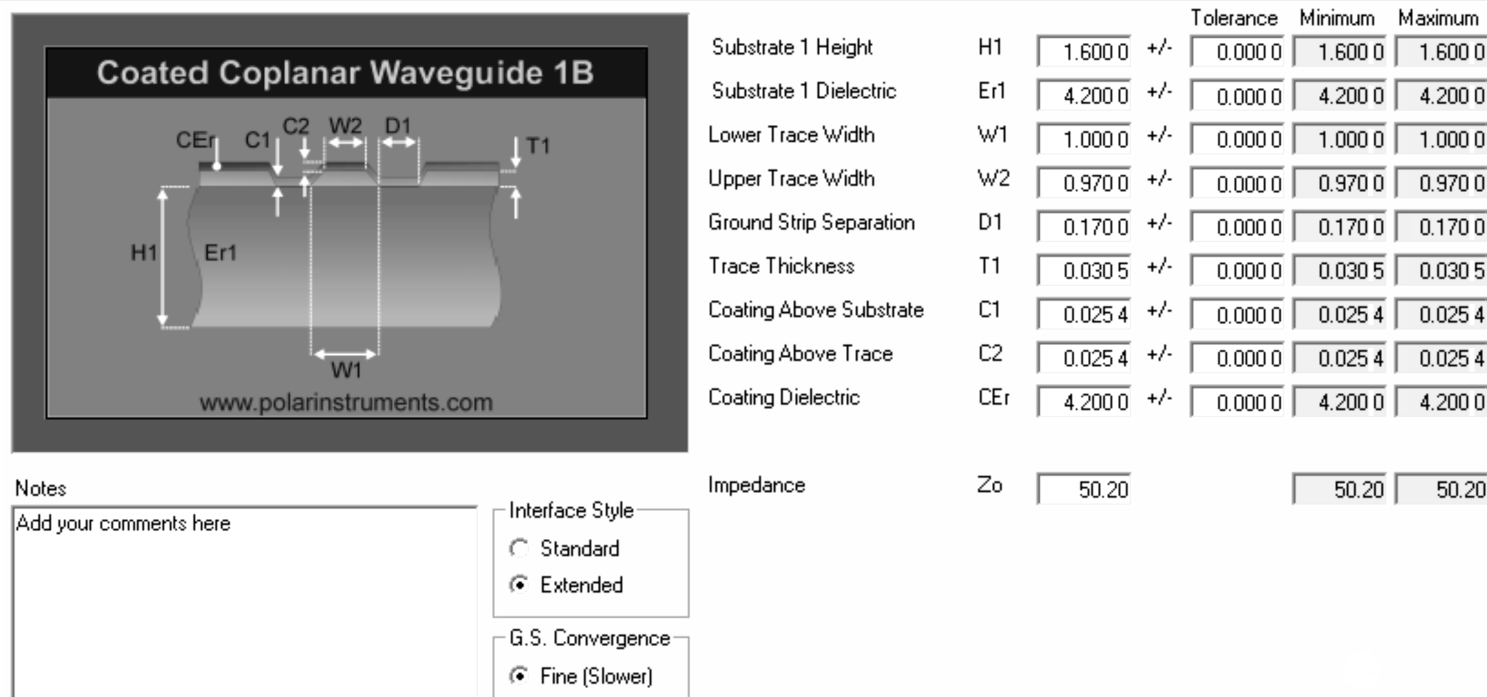
圖8 阻抗匹配仿真計(jì)算圖
3。6 電源電路
DC-DC 穩(wěn)壓芯片采用 SPX3819-3.3 低功耗電源芯片,其原理如圖9 所示,為 NB-IOT 模組提供穩(wěn)定的3.3V 電壓,最大輸出電流可達(dá)500 mA,滿足 NB-IOT 模組天線開啟時(shí)所需的瞬時(shí)功耗,靜態(tài)電流1μA,符合車位傳感節(jié)點(diǎn)的低功耗設(shè)計(jì)需求,在輸出端并聯(lián)100μF 大電容,以防止天線開啟時(shí)工作電流瞬時(shí)增大引起的電壓跌落,供電引腳端口采用10μF,0.1μF,1nF,100pF 的組合形式以濾過高頻信號(hào)干擾。
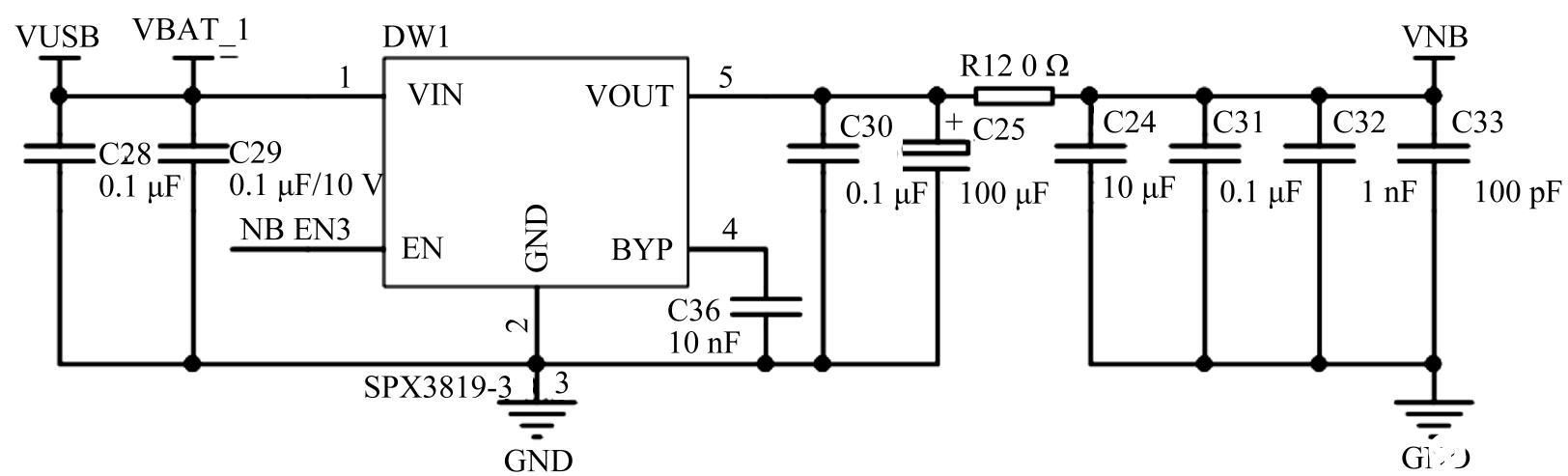
圖9 電源電路圖
3。7 鋰電池充電電路
筆者設(shè)計(jì)的車位傳感節(jié)點(diǎn)采用鋰電池供電,電路 中預(yù)留了鋰電池充電電路,以滿足鋰電池充電需求, 如圖10所示。鋰電池充電管理芯片選用 TP5100,內(nèi)置功率 MOS管,工作電流可通過編程控制在0.1~2 A,自帶過流過壓保護(hù),耐用性強(qiáng)且使用方便。鋰電池采用的是電壓3.7V,總?cè)萘浚保埃玻埃埃恚粒璧牟⒙?lián)式鋰電池組,當(dāng)泊車位沒有車輛進(jìn)出的情況下,傳感器長期處于低功耗運(yùn)行模式,MCU 進(jìn)入啟用 RTC喚醒的 Stop 模式,功耗約為1.6μA。三軸磁傳感器在 ODR 為5 Hz的低功耗檢測模式下工作,功耗約為15μA。NB-IOT 模組進(jìn)入 PSM 模式,功耗約為5μA。節(jié)點(diǎn)中其他模塊如存儲(chǔ)芯片在掉電模式下的功耗極低僅1μA,傳感器節(jié)點(diǎn)在低功耗模式下總功耗約25μA,鋰電池組的最大放電量約為標(biāo)量的70%,因此,在沒有車輛進(jìn)出的理想條件下,可以估算出鋰電池理論上最長可以為傳感器節(jié)點(diǎn)提供285600h即33 年的續(xù)航時(shí)間。
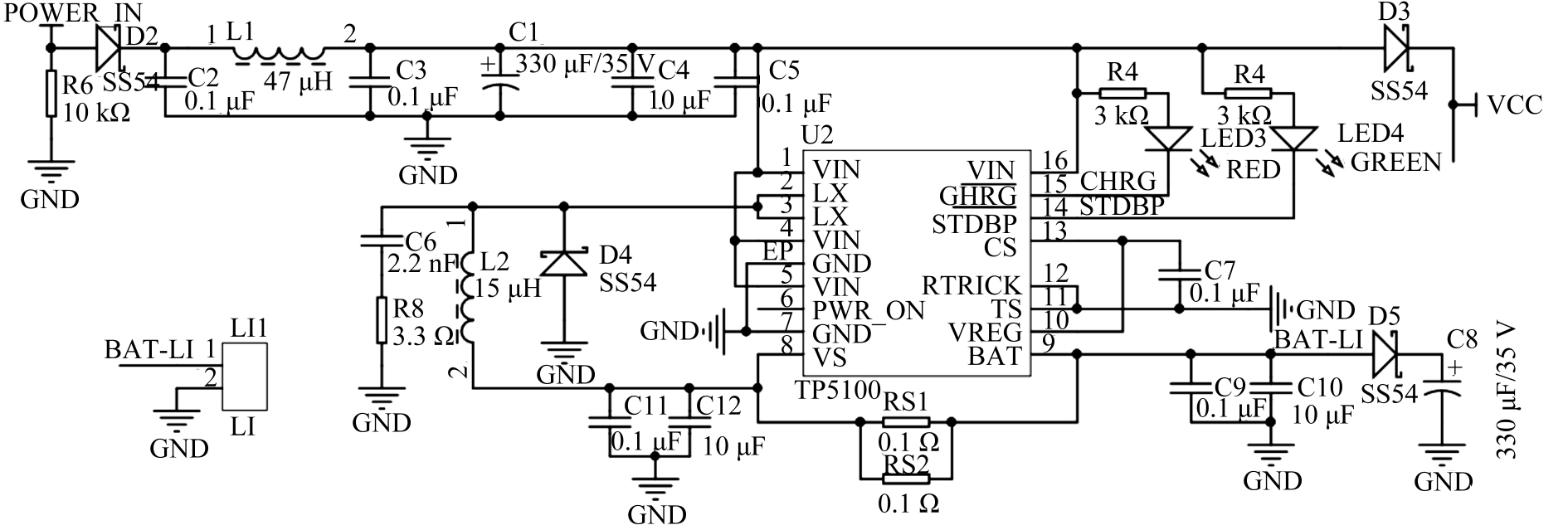
圖10 鋰電池充電電路圖
4 軟件設(shè)計(jì)
軟件主程序流程如圖11所示,上電時(shí)首先進(jìn)行系統(tǒng)的初始化,完成對(duì) NB-IOT 模組、三軸磁力傳感器、MCU 及各項(xiàng)網(wǎng)絡(luò)參數(shù)的配置,NB-IOT 模組的注網(wǎng)過程包括通過相應(yīng)的 AT 指令對(duì) NB-SIM 卡的有效性、模組頻段、網(wǎng)絡(luò)激活狀態(tài)、網(wǎng)絡(luò)注冊(cè)狀態(tài)、信號(hào)質(zhì)量和連接狀態(tài)等環(huán)節(jié)進(jìn)行查詢驗(yàn)證,以 確保NB-IOT 數(shù)據(jù)能夠正常接收和發(fā)送,待 NB-IOT 模組成功注網(wǎng)后,進(jìn)入泊車位檢測流程,MCU 對(duì)磁力傳感器采集的數(shù)據(jù)進(jìn)行分析判斷,若車位狀態(tài)發(fā)生了改變,將車位狀態(tài)信息發(fā)送到平臺(tái),并進(jìn)入低功耗模式,若車位狀態(tài)未發(fā)生改變,則直接進(jìn)入低功耗模 式,當(dāng)發(fā) 生定時(shí)中斷或傳感器發(fā)出外部中斷時(shí), MCU 喚醒并重新進(jìn)入泊車位檢測流程,如此往復(fù)循環(huán)。
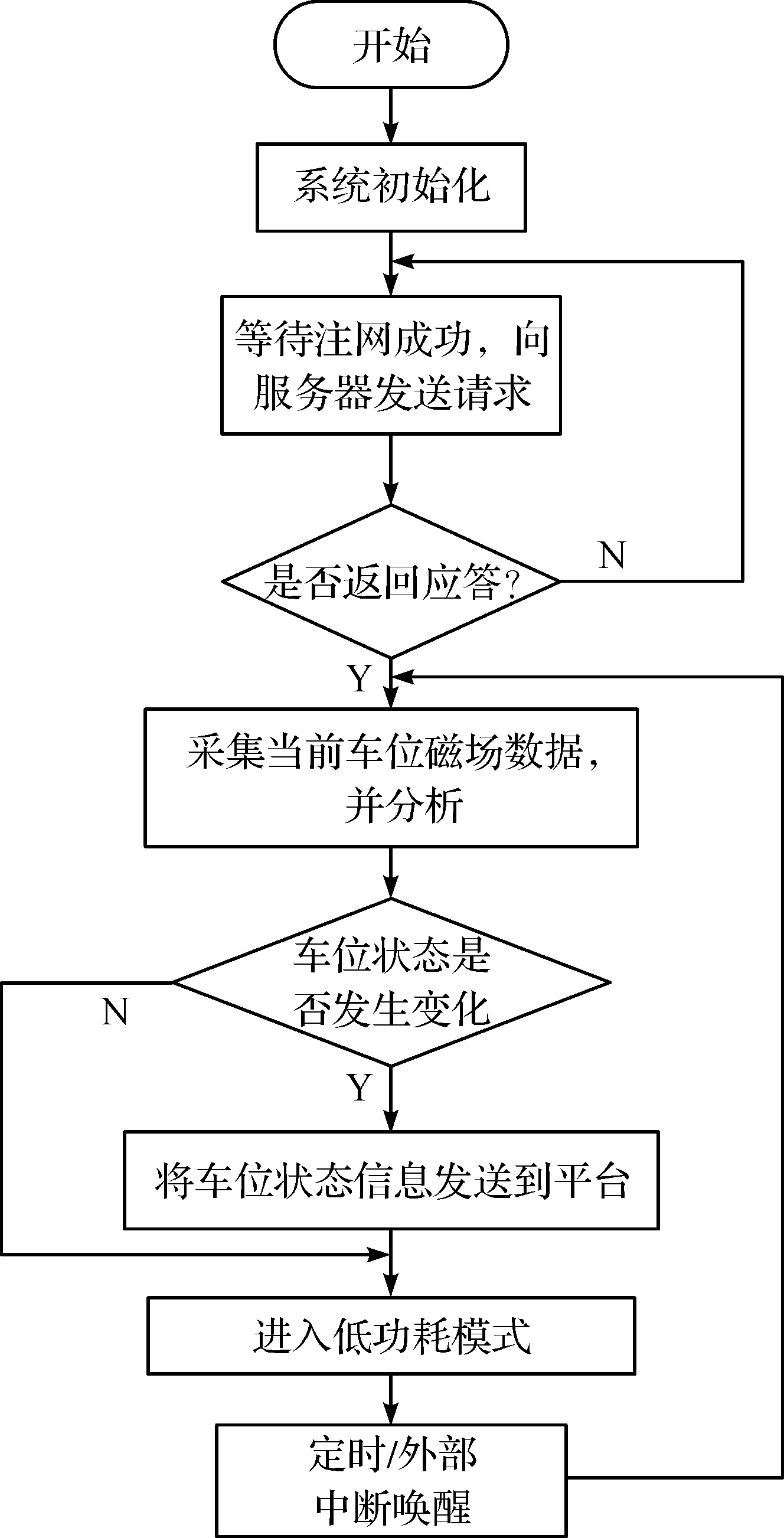
圖11 主程序流程圖
泊車位檢測總體流程如圖12所示,主要包含以下幾個(gè)環(huán)節(jié):數(shù)據(jù)采集,主要負(fù)責(zé)對(duì)磁場進(jìn)行實(shí)時(shí)數(shù) 據(jù)采集;數(shù)據(jù)濾波,對(duì)采集來的實(shí)時(shí)數(shù)據(jù)進(jìn)行過濾, 濾除干擾信號(hào)以及毛刺;分析判斷,獲取到濾處理后 的數(shù)據(jù),并根據(jù)這些數(shù)據(jù)分析判斷車位的狀態(tài)并輸出;基準(zhǔn)線更新,基準(zhǔn)線是傳感器節(jié)點(diǎn)進(jìn)行車位檢測判斷的重要依據(jù),磁場受到溫度等環(huán)境因素的影響會(huì)產(chǎn)生微弱的變化,因此在車位空閑的情況下, 對(duì)三軸基準(zhǔn)數(shù)據(jù)進(jìn)行定期的更新,有利于保證車位檢測的準(zhǔn)確性。
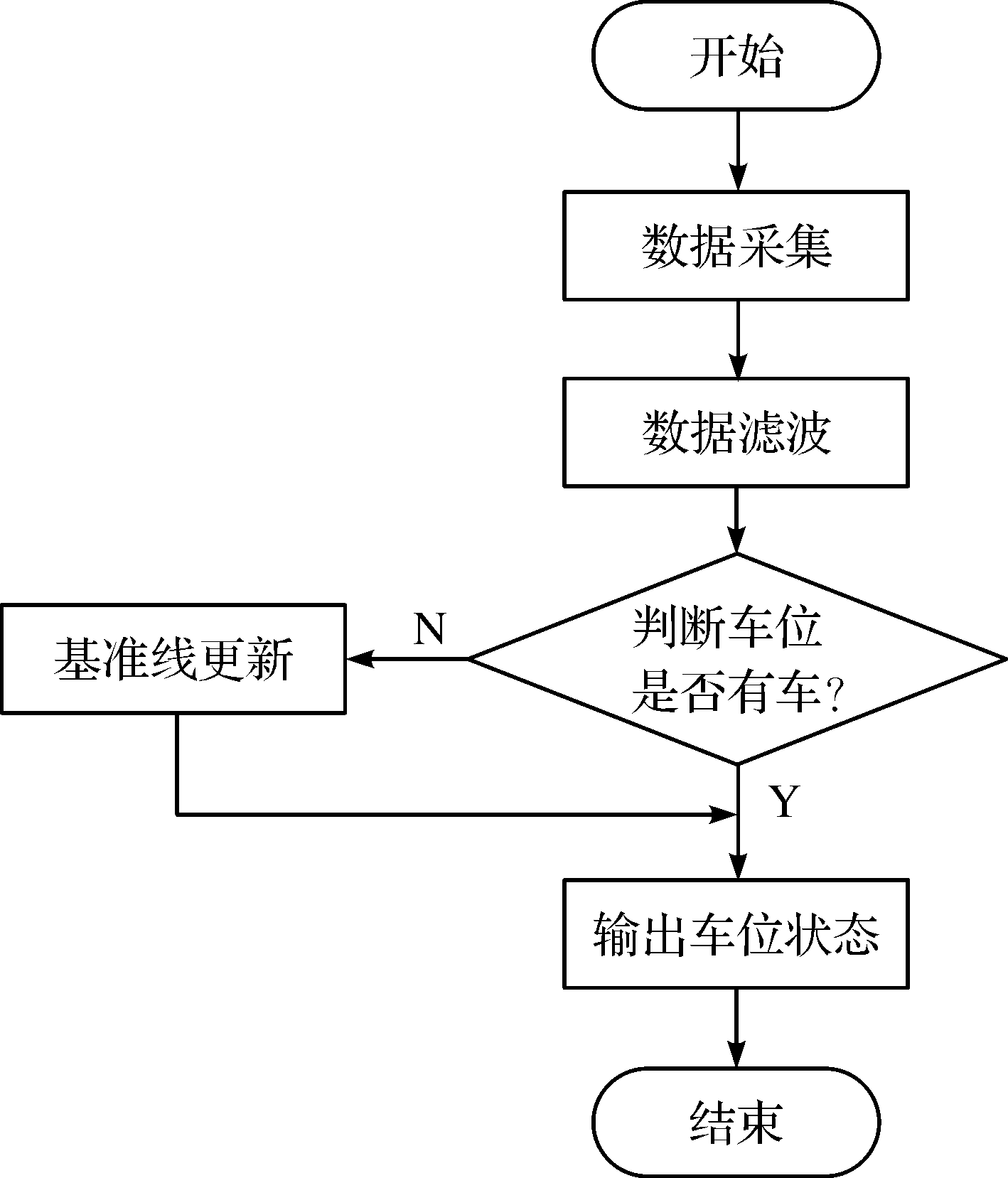
圖12 泊車位檢測總流程圖
本設(shè)計(jì)所用濾波算法采用中值率波與均值濾波結(jié)合的方式進(jìn)行處理。中值濾波算法的公式為
Y(i)=Med[x(i-n),…,x(i),…,x(i+n)]n∈N (2)
將采樣到的一組數(shù)據(jù)由大到小進(jìn)行排列,將中間的值作為采樣的數(shù)值。均值濾波算法為

將獲得的一組數(shù)據(jù)取平均值作為采樣的結(jié)果, 這兩種方法結(jié)合可以有效濾除所獲取數(shù)據(jù)的毛刺等干擾。
傳感節(jié)點(diǎn)發(fā)生中斷喚醒后開始分析判斷車位狀態(tài),首先 MCU 處于低功耗待機(jī)模式,傳感器在低功耗連續(xù)檢測狀態(tài)下工作,每秒檢測5 次磁場,當(dāng)傳感器檢測到Z軸數(shù)值大于設(shè)定好的閾值時(shí),傳感器產(chǎn)生中斷喚醒 MCU,具體的中斷處理流程如圖13所示。
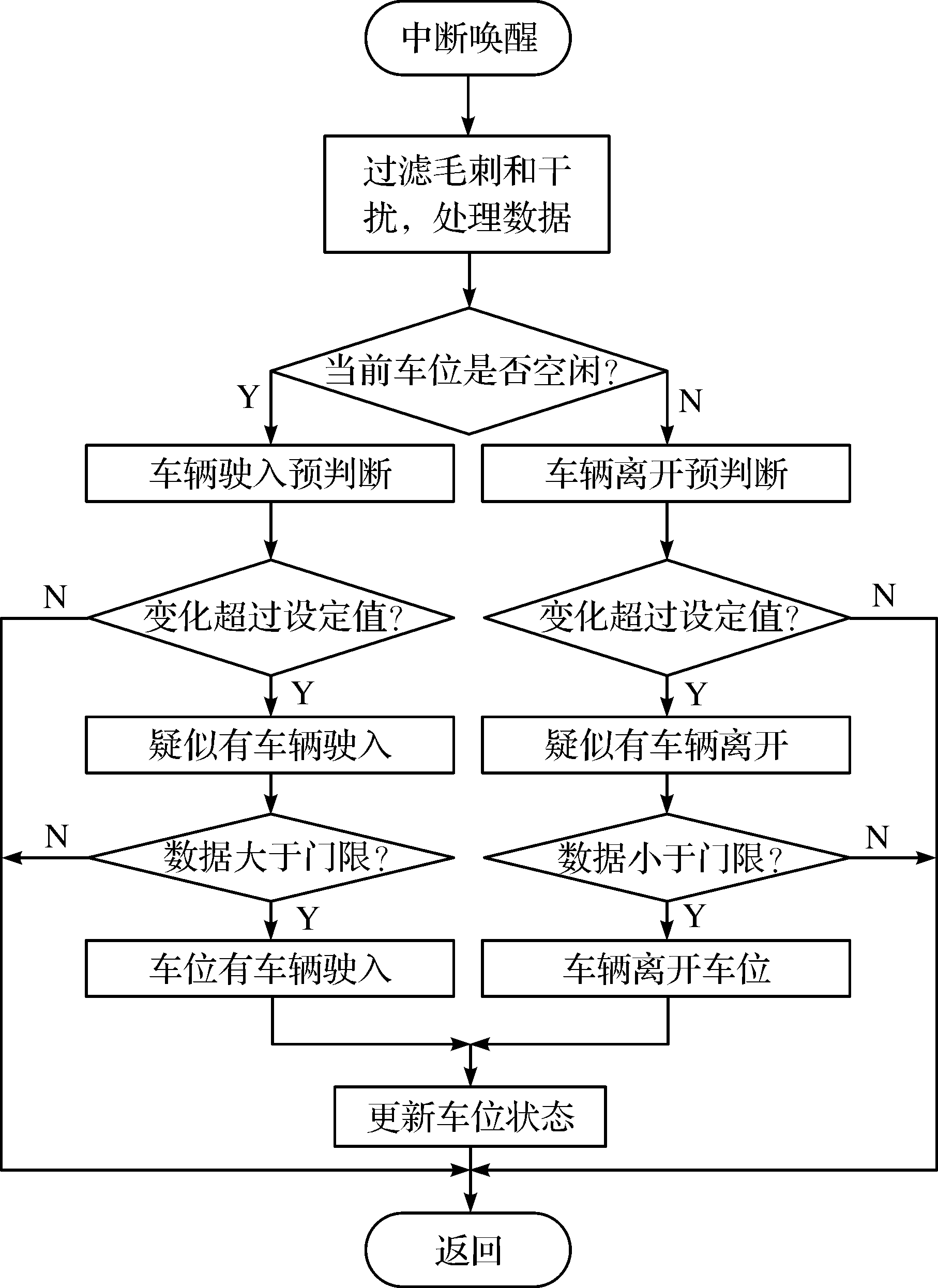
圖13 車位狀態(tài)判斷流程圖
MCU 喚醒后通過濾波獲取并處理數(shù)據(jù),根據(jù)當(dāng)前車位是否空閑分兩種方向進(jìn)行車位的判斷,主要的判斷依據(jù)是將車位在空閑狀態(tài)下獲得的磁場基準(zhǔn)線與采集的數(shù)據(jù)進(jìn)行比較:若車位當(dāng)前空閑,就判斷車位是否是車輛駛?cè)胲囄唬舨杉降臄?shù)據(jù)并沒有滿足車輛駛?cè)胲囄坏呐袛鄺l件,則認(rèn)為引起中斷的為干擾事件,傳感器節(jié)點(diǎn)重新回到低功耗待機(jī)狀態(tài),等待車輛駛?cè)耄蝗糗囄灰呀?jīng)有車停,則判斷車輛是否離開車位,當(dāng)引起中斷的數(shù)據(jù)沒有滿足車輛離開的判斷條件時(shí),則認(rèn)為該中斷源為干擾,傳感器節(jié) 點(diǎn)重新回到低功耗檢測狀態(tài),等待下一次中斷產(chǎn)生。
本研究實(shí)現(xiàn)的車位傳感器節(jié)點(diǎn)將選用的 NB- IoT 模組配置在支持 AT 指令的 CoAP 通信模式下,在該工作模式下 NB-IOT 模組可以與支持CoAP通信協(xié)議的 NB-IOT 平臺(tái)進(jìn)行數(shù)據(jù)交互,并且 MCU可以通過 USART 串口靈活地發(fā)送豐富的 AT 指令對(duì) NB-IOT 模組進(jìn)行操作。
NB-IOT 模組實(shí)時(shí)發(fā)送泊車位狀態(tài)的前提是 NB-IOT 模組已經(jīng)成功注網(wǎng),以3號(hào)泊車位上傳車位有車輛駛?cè)氲臓顟B(tài)信息為例,要上傳的格式為長度7 字節(jié)的16 進(jìn)制數(shù)據(jù),內(nèi)容為0301020001FC01,其中第1字節(jié)為泊車位地址,第2字節(jié)為功能碼,代表上傳的是泊車位狀態(tài),第3 字節(jié)表示數(shù)據(jù)的字節(jié)長度,第4,5字節(jié)為泊車位狀態(tài)信息,最后兩個(gè)字節(jié)為 CRC16校驗(yàn) 碼。NB-IOT 模組發(fā)送泊車位狀態(tài)的 AT 指令流程如圖14所示。
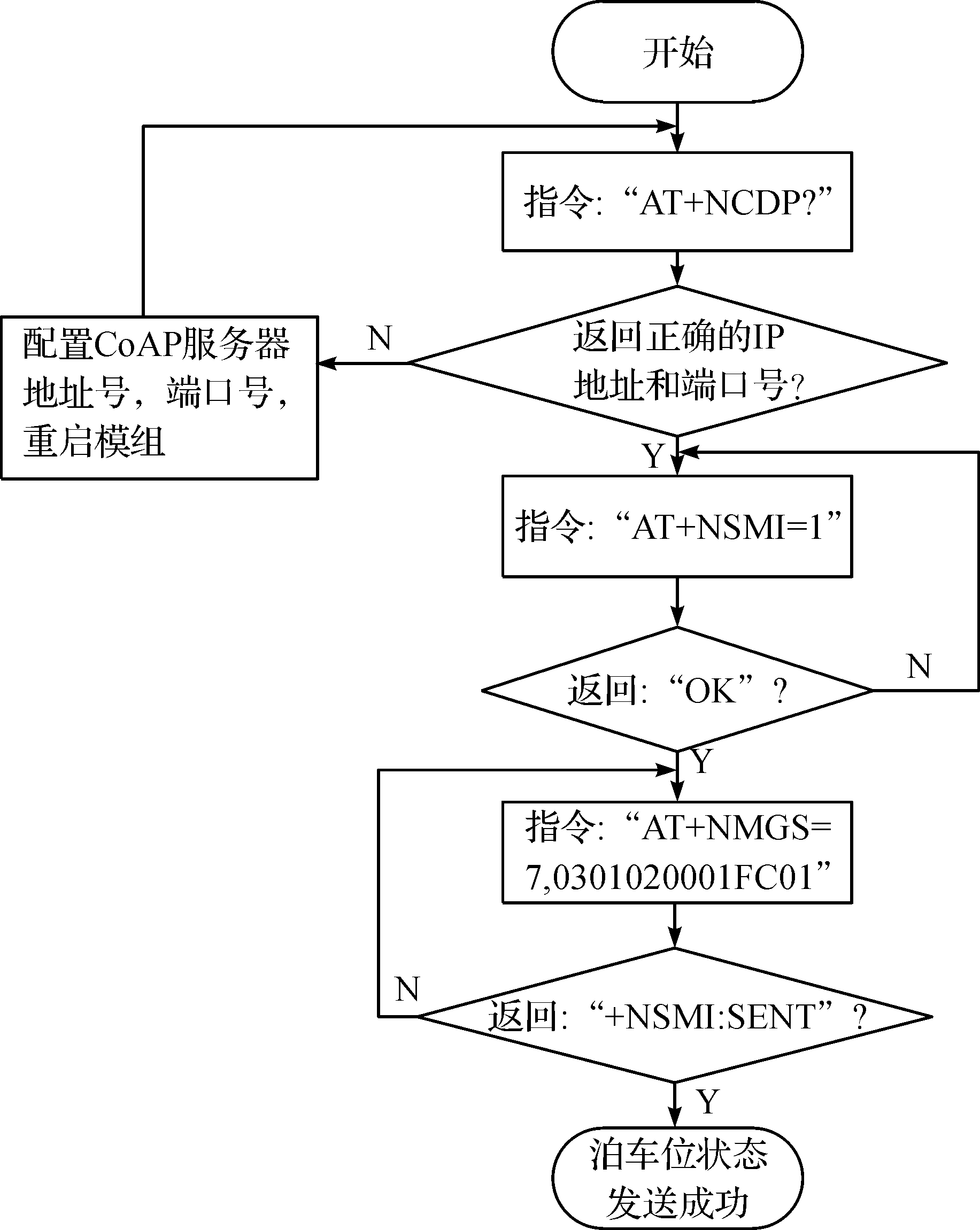
圖14 泊車位狀態(tài)信息發(fā)送流程圖
首先,向模組發(fā)送 NCDP 指令查詢模組設(shè)置的CoAP 服務(wù)器IP 地址號(hào)及網(wǎng)絡(luò)端口號(hào)是否正確,若返回的值與所要發(fā)送的 NB-IOT 平臺(tái)不一致,或者返回“ERROR”,則需要給模組配置正確的IP 地址及端口號(hào),重啟模組后生效;之后,向模組發(fā)送 NS- MI指令,開啟模組的“消息發(fā)送通知”功能,開啟成功后,使用 NMGS指令發(fā)送泊車位狀態(tài)信息,若模組返回“ERROR”,則需要再次發(fā)送泊車位狀態(tài)信息,若發(fā)送成功,模組將返回“+NSMI:SENT”告知 MCU信息已經(jīng)成功發(fā)送,至此泊車位狀態(tài)發(fā)送完成。
-
傳感器節(jié)點(diǎn)
+關(guān)注
關(guān)注
0文章
15瀏覽量
12204 -
NB-IoT
+關(guān)注
關(guān)注
413文章
1452瀏覽量
186310
發(fā)布評(píng)論請(qǐng)先 登錄
NB-IoT單燈控制器:智慧照明的“神經(jīng)末梢”
NB-IoT模組選型指南:2025十大NB窄帶傳輸設(shè)備品牌廠家盤點(diǎn)與應(yīng)用方案解析

關(guān)于Cat.1網(wǎng)絡(luò)會(huì)取代NB-IoT技術(shù)嗎?
華為技術(shù)資料合集(硬件開發(fā)/C語言/PCB設(shè)計(jì)/天線通信)
三星Galaxy S25采用安立MT8870A測試儀支持NTN NB-IoT
從入門到精通:傾角傳感器工作原理全解析,分類應(yīng)用全都有
NB-IOT物聯(lián)網(wǎng)基站是如何通信的呢?
什么是物聯(lián)網(wǎng)nb水表?

NB-IoT類產(chǎn)品功耗的研發(fā)測試方案
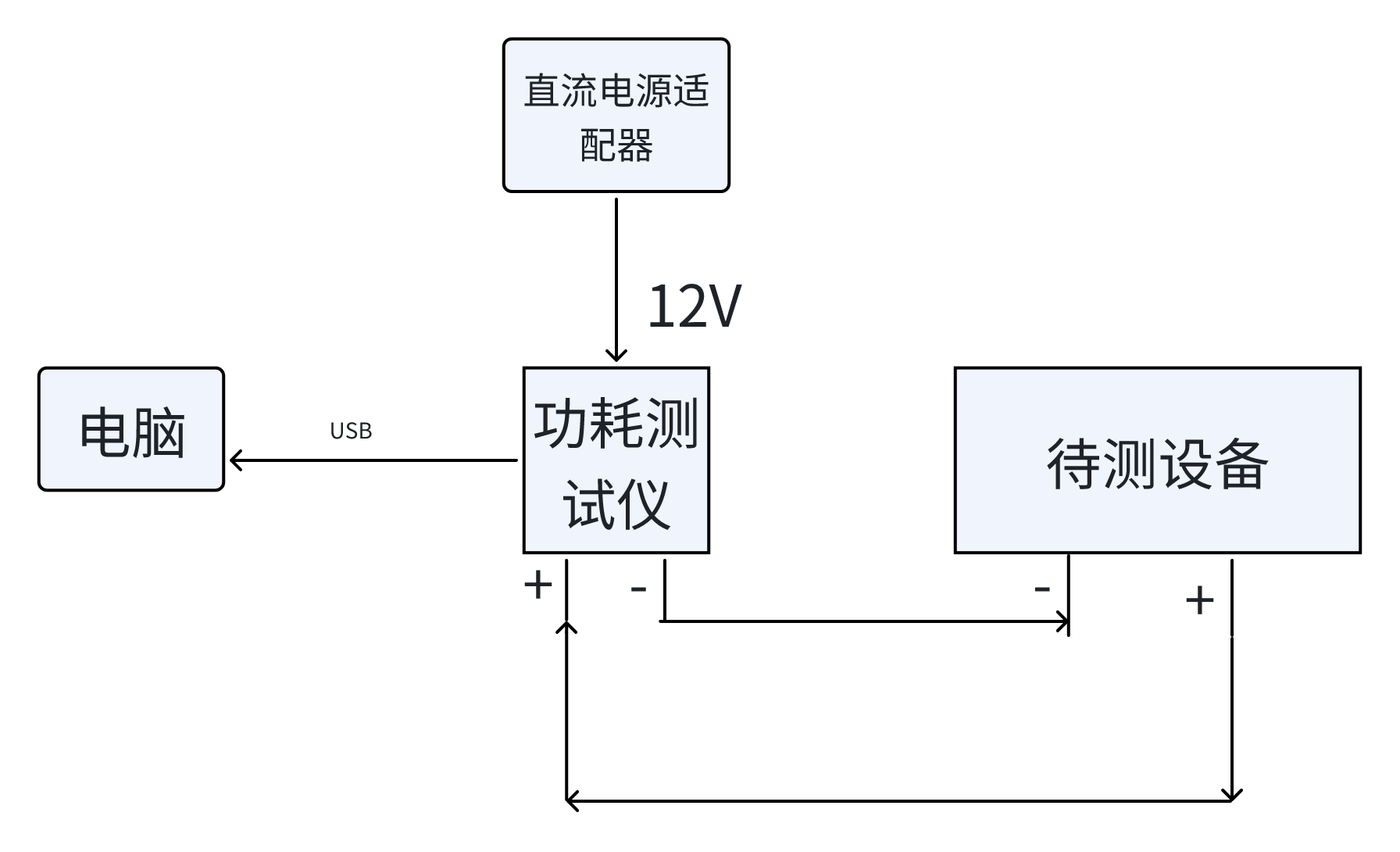
NB-IOT類產(chǎn)品的通信功能生產(chǎn)測試方案

6種主流無線通信技術(shù):藍(lán)牙,WiFi,2.4G,Zigbee,LoRa和NB-IoT





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論