") 快速確定電機(jī)旋轉(zhuǎn)方向的方法
快速確定電機(jī)旋轉(zhuǎn)方向的方法

在電機(jī)測(cè)試或者初期設(shè)計(jì)階段,需要考慮電機(jī)旋轉(zhuǎn)方向,而如何設(shè)計(jì)繞組的三相關(guān)系著電機(jī)的旋轉(zhuǎn)方向。
如果說(shuō)到電機(jī)的旋轉(zhuǎn)方向很多人會(huì)認(rèn)為很簡(jiǎn)答,對(duì)于分布卷電機(jī)或者集中卷q=0.5的電機(jī)旋轉(zhuǎn)方向很好確定。下面分別介紹q=0.5的6極9槽電機(jī)旋轉(zhuǎn)方向的確定,q=3/10的10極9槽電機(jī)的旋向確定方法。
6極9槽
對(duì)于6極9槽電機(jī),槽電角度為3*360/9=120度,因此相鄰槽就是相鄰相。對(duì)于圖中的1,2,3齒分別引出導(dǎo)線,最終定義為ABC相。上面我們已經(jīng)計(jì)算好了1,2-2,3-3,1之間的電角度是120度,但是我們不知道是超前還是滯后關(guān)系。
如果電機(jī)順時(shí)針旋轉(zhuǎn),可以觀測(cè)反電勢(shì)的峰值,1齒最先達(dá)到峰值,然后是2齒,然后是3齒。那么我們接線就可以1A 2B 3C,這樣接線電機(jī)就是順時(shí)針旋轉(zhuǎn)的。該種方法的思路就是電機(jī)的反電勢(shì)相位關(guān)系是與給該相繞組通電的電源對(duì)應(yīng)的。
如果電機(jī)逆時(shí)針旋轉(zhuǎn),則3齒最先達(dá)到峰值,然后是2齒,然后是1齒。所以接線就可以3A 2B 1C,這樣接線電機(jī)就是逆時(shí)針旋轉(zhuǎn)的。
其實(shí)電機(jī)旋轉(zhuǎn)方向是由相序決定的,相序即相與相的順序,而不是固定的位置,所以對(duì)應(yīng)123齒這種相序:ABC,CAB,BCA的接線方式在上述例子中電機(jī)的旋轉(zhuǎn)方向都是順時(shí)針的。對(duì)應(yīng)123齒:CBA,ACB,BAC的接線方式電機(jī)是逆時(shí)針旋轉(zhuǎn)的。
20極18槽
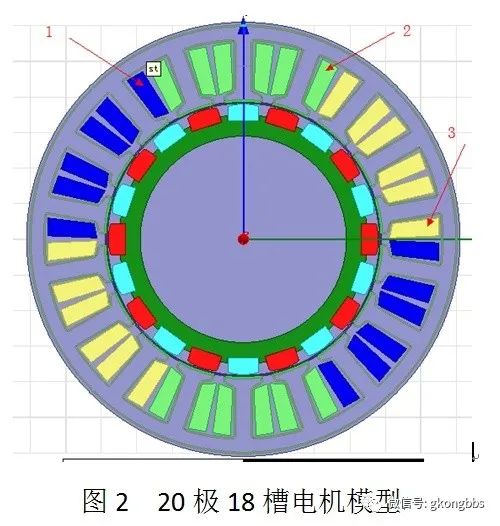
這個(gè)電機(jī)是20極18槽,單元電機(jī)對(duì)應(yīng)的是10極9槽。槽電角度為360/18*10=200°,根據(jù)繞組排布,1-2-3繞組相差3個(gè)槽,對(duì)應(yīng)相差600°電角度,600°電角度與240°電角度相同,因此該電機(jī)1-2-3繞組間夾角是240°的。在機(jī)械上或者說(shuō)在物理上(或在上圖中)1-2-3的排列順序是順時(shí)針,但是在電角度上1-2-3是如下圖逆時(shí)針排列的,因?yàn)殡娊嵌炔?40°。

因此,此時(shí)如果你通電順序是1-2-3(磁勢(shì)最大值先掃過(guò)1,在掃過(guò)2,在掃過(guò)3),磁場(chǎng)旋轉(zhuǎn)方向是逆時(shí)針的,則電機(jī)是逆時(shí)針旋轉(zhuǎn)的。而按1-3-2順序通電(磁勢(shì)最大值先掃過(guò)1,在掃過(guò)3,在掃過(guò)2),磁勢(shì)旋轉(zhuǎn)方向是順時(shí)針的,則電機(jī)是順時(shí)針旋轉(zhuǎn)的。
下圖中仿真的了電機(jī)逆時(shí)針旋轉(zhuǎn)時(shí),ABC繞組空間按逆時(shí)針排布,仿真結(jié)果中反電勢(shì)關(guān)系為A-C-B超前120°。


通用規(guī)則
1、根據(jù)線圈的物理位置(順時(shí)針排布o(jì)r逆時(shí)針排布),結(jié)合相差電角度畫(huà)出三相繞組電關(guān)系,分析繞組磁動(dòng)勢(shì)旋轉(zhuǎn)方向,進(jìn)而得出電機(jī)旋轉(zhuǎn)方向。
2、其實(shí)電機(jī)里邊就電角度差120°和相差240°兩種情況。相差120°,則旋轉(zhuǎn)方向與123空間排布方向相同;相差240°,則旋轉(zhuǎn)方向與123繞組空間排布方向相反。
-
電機(jī)
+關(guān)注
關(guān)注
143文章
9291瀏覽量
149309
原文標(biāo)題:電機(jī)旋轉(zhuǎn)方向如何快速確定?
文章出處:【微信號(hào):gkongbbs,微信公眾號(hào):工控論壇】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
如何改變無(wú)刷直流電機(jī)的旋轉(zhuǎn)方向?
請(qǐng)教LabVIEW大神怎么確定圖片的旋轉(zhuǎn)角
無(wú)刷電機(jī)為什么會(huì)一直反方向高速旋轉(zhuǎn)?
步進(jìn)電機(jī)最簡(jiǎn)單的驅(qū)動(dòng)方法
GB 1971-2006 旋轉(zhuǎn)電機(jī) 線端標(biāo)志與旋轉(zhuǎn)方向
電機(jī)旋轉(zhuǎn)方向如何快速確定?
電機(jī)如何旋轉(zhuǎn)?不同電機(jī)的旋轉(zhuǎn)原理解析
如何使用IC555控制伺服電機(jī)的方向
電機(jī)如何旋轉(zhuǎn) 電機(jī)的旋轉(zhuǎn)原理是什么
伺服電機(jī)的精確定位方法及分類簡(jiǎn)介 | 步進(jìn)電機(jī)驅(qū)動(dòng)器細(xì)分評(píng)定

電機(jī)旋轉(zhuǎn)方向快速識(shí)別技巧





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論