") 日立集團研發(fā)出更經(jīng)濟實惠又緊湊的全向立體攝像頭系統(tǒng)
日立集團研發(fā)出更經(jīng)濟實惠又緊湊的全向立體攝像頭系統(tǒng)
日立集團為不斷增長的ADAS(高級駕駛輔助系統(tǒng))市場研發(fā)出更經(jīng)濟實惠又緊湊的全向立體攝像頭系統(tǒng)。
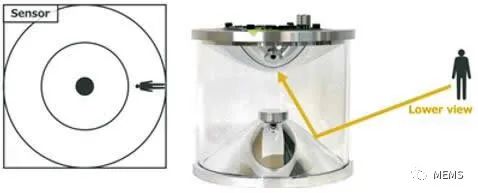
日立集團最新研發(fā)的全向立體攝像頭
自動駕駛需要更緊湊的、低成本的設(shè)備用于360°成像和周圍物體的距離測量。據(jù)麥姆斯咨詢報道,近日,日本科技巨頭日立公司(Hitachi)的研究人員開發(fā)出了一種基于兩個雙曲面鏡以及一組微鏡和傳感器的全向立體攝像頭,從而使該攝像頭比眾多傳統(tǒng)的ADAS光學(xué)系統(tǒng)成本更低。
在剛剛結(jié)束的SPIE光學(xué)和光子學(xué)數(shù)字論壇上,Ryota Kawamata介紹了他的團隊為自動駕駛開發(fā)的緊湊型全向立體攝像頭。尤其是日立集團為該款經(jīng)濟型攝像頭設(shè)計的一種新型校準方法。
Kawamata的演講中說道:“基于C. Mei和P. Rives開發(fā)的校準方法,我們考慮通過更高階的徑向畸變、精細的切向畸變、圖像傳感器傾斜度和微鏡鏡面偏移,提高了校準精度。”
目前該方法已應(yīng)用于日立公司的全向立體攝像頭樣機中。它的優(yōu)點是將校準精度的均方根降低多達2.2倍。Kawamata說道:“對于ADAS及其它更多應(yīng)用,相距14 m的物體,距離誤差小于8%,與原始方法相比,誤差改善了7倍多,盡管該誤差仍大于5%的目標值。”
該小組仍在致力于改進該設(shè)備和方法的性能。“我們認為剩余的校準誤差是由于玻璃鏡筒的變形和光學(xué)分辨率的降低而引起的。在今后的研發(fā)中,我們計劃在樣機的校準和光學(xué)分辨率上做進一步的改進。此外,還需要開發(fā)一種鏡筒擴展圖像的校正方法。”Kawamata補充說道。
Kawamata還解釋說到,市場可能需要更便宜的基于激光雷達的傳感系統(tǒng),該系統(tǒng)可提供更寬的視野,也就是車輛周圍360°無死角的視野。“我們預(yù)計,2018至2030年間,對ADAS和AD(自動駕駛)系統(tǒng)的需求將增長約400%。其中具有全方位視場角(FOV)的高級系統(tǒng)的比例也將顯著增長。”
“為了以較低的成本實現(xiàn)全向視圖,通常需要結(jié)合激光雷達,再通過計算接收反射光的時間來測量到物體的距離。例如,Waymo公司使用五個激光雷達對其系統(tǒng)進行360°覆蓋。按照這種方式,距離誤差非常低,只有0.1%,但是成本很高,每個系統(tǒng)約2000美元。”
“我們目前使用的立體攝像頭,是通過兩個攝像頭之間的視差(角度差)來測量距離的。我們的解決方案是使用四個寬視場的立體攝像頭創(chuàng)建全向視圖。如此就能達到足夠低的5%的距離誤差,同時價格更實惠,僅為500美元。”
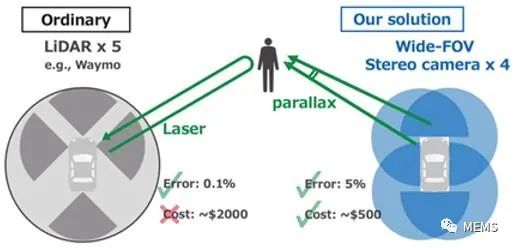
該解決方案使用四個寬視場的立體攝像頭創(chuàng)建全向視圖
Kawamata還提到日立集團的改進結(jié)果包括將RMS(均方根)從1.4像素改進到了0.65像素。“我們還進行了效果演示,通過在高爾夫球車中安裝攝像頭以收集圖像和數(shù)據(jù)。我們最終評估的實驗誤差中,發(fā)現(xiàn)相距14 m的物體誤差為8%,而理論預(yù)測誤差為5%。
“為了調(diào)整我們的樣機,需要消除由于相機玻璃鏡筒厚度不同造成的剩余失真,提高圖像分辨率,并開發(fā)出更精確的校準方法。”
SPIE光學(xué)和光子學(xué)數(shù)字論壇一直持續(xù)到8月28日,期間有1200多個按需技術(shù)演講、300張海報以及900份論文,涉及領(lǐng)域包括:納米科學(xué)與工程應(yīng)用,有機光子學(xué)和電子學(xué)以及光學(xué)工程和應(yīng)用。
-
攝像頭
+關(guān)注
關(guān)注
61文章
4959瀏覽量
97771 -
adas
+關(guān)注
關(guān)注
310文章
2242瀏覽量
209943 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14230瀏覽量
169801
原文標題:SPIE光學(xué)和光子學(xué)論壇 | 全向立體攝像頭,助力自動駕駛
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
安防監(jiān)控攝像頭更規(guī)范,AI視覺監(jiān)控有多大潛力?

天波解疑:IPC監(jiān)控攝像頭的低功耗特點及其優(yōu)勢

社區(qū)安裝IPC攝像頭,跟安裝一般安防監(jiān)控攝像頭有什么區(qū)別?

車載攝像頭的EMC問題案例
車載攝像頭的EMC案例分享

攝像頭及紅外成像的基本工作原理


大聯(lián)大詮鼎集團推出AOV攝像頭方案
用于環(huán)視和CMS攝像頭系統(tǒng)的四通道攝像頭應(yīng)用程序

Jacinto 7攝像頭捕捉和成像子系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論