") KUKA機器人的初始化運行原因
KUKA機器人的初始化運行原因
KUKA機器人的初始化運行稱為 BCO 運行。
BCO 是 B lock coincidence (即程序段重合)的縮寫。重合意為 “ 一致 ” 及 “ 時間 / 空間事件的會合 ”。
在下列情況下要進行 BCO 運行:
選擇程序 (例 1)
程序復位: 復位 (例 1)
程序執(zhí)行時手動移動 (例 1)
更改程序 (例 2)
語句行選擇 (例 3)

BCO 運行執(zhí)行舉例
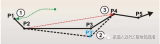
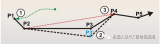
1 選定程序或程序復位后 BCO 運行至原始位置
2 更改了運動指令后執(zhí)行 BCO 運行 刪除、示教了點后
3 進行了語句行選擇后執(zhí)行 BCO 運行
BCO 運行的原因 :
為了使當前的機器人位置與機器人程序中的當前點位置保持一致,必須執(zhí)行 BCO 運行。
僅當當前的機器人位置與編程設定的位置相同時才可進行軌跡規(guī)劃。因此,首先必須將 TCP 置于軌跡上。
在選擇或者復位程序后 BCO 運行至 Home 位置
相關系統(tǒng)變量
$ON_PATH 在軌跡上
用于監(jiān)視編程路徑的信號聲明
BCO運行后設置此輸出。因此,機器人控制器會與上級控制器通信,使機器人位于編程路徑上,只有當機器人離開路徑,程序被復位或執(zhí)行塊選擇時,輸出才再次復位。
VW標準設置 :SIGNAL $ON_PATH $OUT[4040]
$MOVE_BCO
指示當前是否正在執(zhí)行BCO運行
$MOVE_BCO=State
true:正在進行BCO運行。
false:不進行BCO運行。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29563瀏覽量
211920 -
KUKA機器人
+關注
關注
4文章
144瀏覽量
9513
發(fā)布評論請先 登錄
相關推薦
熱點推薦
KUKA機器人問題解答
1 開機坐標系無效 世界坐標系是以槍頭為基點,在這種坐標系中機器人所有的動作都是按照以槍頭為頂點來完成移動,XYZ方向切割槍方向不改變,如果機器人在世界坐標系中移動,槍頭也隨著改變方向,那就是我們在
發(fā)表于 07-15 07:48
KUKA庫卡機器人伺服驅動器相關型號舉例
KUKA庫卡機器人伺服驅動器(Servo Drive)是KUKA運動控制的重要組成部分,被普遍應用于工業(yè)機器人及數控加工中心等自動化設備中。
發(fā)表于 09-08 16:30
KUKA焊接機器人伺服電機常見故障及維修處理
KUKA焊接機器人伺服電機常見故障及維修處理1、庫卡機器人伺服電機的基本檢查由于庫卡機器人伺服電機內含有精密檢測器,因此,當發(fā)生碰撞、沖擊時可能會引起故障,在對庫卡
發(fā)表于 09-26 16:51
工業(yè)機器人組成結構相關資料分享
工業(yè)機器人是近兩年機械行業(yè)最熱的字眼,隨著企業(yè)工業(yè)機器人的增多,很多機械工程師對于工業(yè)機器人充滿了好奇。作為機器人四大家族之一的KUKA,已
發(fā)表于 07-05 06:44
庫卡機器人MGV電源模塊維修
KUKA庫卡機器人MGV電源模塊維修PH1013-2840MGV電源維修 庫卡電源模塊維修 機器人電源模塊維修 庫卡控制器維修 KUKA電源維修KU
發(fā)表于 09-08 07:30
沒有有前輩用LabVIEW控制kuka機器人c2的經驗?通訊是怎么做到的?
我看NI有Robotics Toolkit for KUKA KR C2的附加包,這個怎么用啊?如何和kuka機器人建立通訊啊?是Tcp接口嗎?
發(fā)表于 10-21 20:59
KUKA機器人的初始化運行稱為BCO運行
BCO運行后設置此輸出。因此,機器人控制器會與上級控制器通信,使機器人位于編程路徑上,只有當機器人離開路徑,程序被復位或執(zhí)行塊選擇時,輸出才再次復位。
KUKA C4機器人報:KSS13012<{總線識別號}>ECat Stack初始化時出錯
KUKA C4 機器人報:KSS13012ECat Stack初始化時出錯可能的原因1.原因:在VorkVisual項目中
KUKA機器人的初始化運行
KUKA 機器人的初始化運行稱為 BCO 運行。 BCO 是? B lock coincidence (即程序段重合)的縮寫。重合意為 “
labview運行后如何初始化
LabVIEW是一款強大的圖形化編程軟件,在運行之前通常需要進行一些初始化操作。本文將詳細介紹LabVIEW運行前的初始化過程,并提供了一些
庫卡KUKA機器人常見故障維修
1、KUKA機器人伺服電機維修過熱原因 ①電源電壓過高; ②電源電壓過低,電機在額定負載下運行,電流過大使線圈發(fā)熱; ①修理和拆卸線圈時,熱拆卸方法不正確,會燒壞鐵芯; ①發(fā)動機過載或





 工商網監(jiān)
工商網監(jiān)
評論