") 伺服電機(jī)原點(diǎn)回零模式實(shí)現(xiàn)方案解析
伺服電機(jī)原點(diǎn)回零模式實(shí)現(xiàn)方案解析

1、原點(diǎn)回零方式簡(jiǎn)介:
有幾種原點(diǎn)回零方法,每種方法建立:原點(diǎn)參考(限位或原點(diǎn)開(kāi)關(guān)轉(zhuǎn)換或編碼器索引脈沖)運(yùn)動(dòng)方向以及索引脈沖與限位器原點(diǎn)開(kāi)關(guān)之間的關(guān)系。
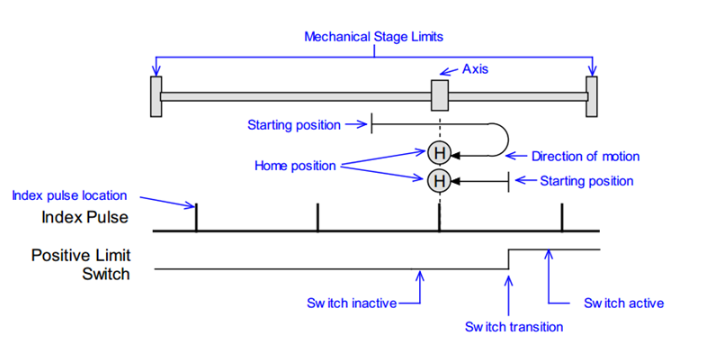
圖 1 回零過(guò)程圖
原點(diǎn)回零模式用于尋找機(jī)械原點(diǎn), 并定位機(jī)械原點(diǎn)與機(jī)械零點(diǎn)的位置關(guān)系。原點(diǎn)回零成后, 電機(jī)停止位置為機(jī)械原點(diǎn)(HomePosition), 通過(guò)設(shè)置 607Ch, 可以設(shè)定機(jī)械原點(diǎn)與機(jī)械零點(diǎn)(ZeroPosition)的關(guān)系:
機(jī)械原點(diǎn) = 機(jī)械零點(diǎn) + 0x607C( home_offset )
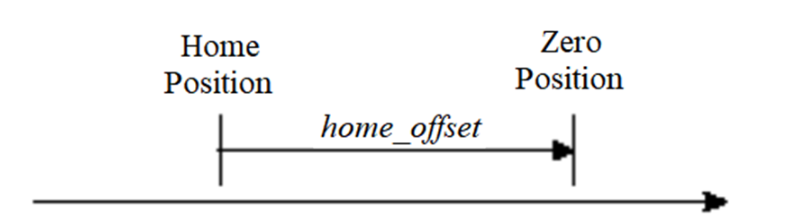
圖 2 機(jī)械原點(diǎn)和機(jī)械零點(diǎn)的關(guān)系
有幾個(gè)關(guān)鍵的CAN參數(shù)需要配置,分別是:
表格 1 相關(guān)參數(shù)

回零速度包括 2 個(gè)速度, 一是搜索減速點(diǎn)信號(hào)速度 6099-1h( 用戶(hù)速度單位 ), 此速度可以設(shè)置為較高數(shù)值,防止回零時(shí)間過(guò)長(zhǎng), 發(fā)生回零超時(shí)故障; 二是搜索原點(diǎn)信號(hào)速度 6099-2h( 用戶(hù)速度單位 ), 此速度可以應(yīng)設(shè)置為較低速度, 防止伺服高速停車(chē)時(shí)產(chǎn)生過(guò)沖, 導(dǎo)致停止位置與設(shè)定機(jī)械原點(diǎn)有較大偏差。
回零加速度 609Ah 在加速段與減速段均使用, 回零模式下快速停機(jī)使能時(shí), 減速度由 6085h 決定
2、回零配置過(guò)程
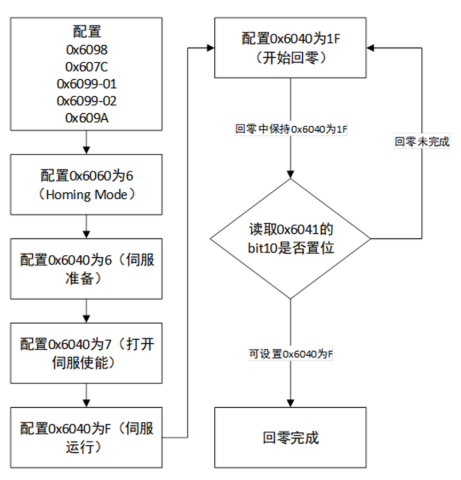
圖 2 利用CANopen配置原點(diǎn)回零過(guò)程
原點(diǎn)回零模式下,上位機(jī)首先應(yīng)選擇原點(diǎn)回零方式(6098h),并設(shè)置回零速度(6099-1h 6099-2h)、回零加速度(609Ah)。給出原點(diǎn)回零觸發(fā)信號(hào)后, 伺服將按照設(shè)定自動(dòng)機(jī)械原點(diǎn), 并完成機(jī)械原點(diǎn)與機(jī)械零點(diǎn)的相對(duì)位置關(guān)系設(shè)置。 伺服驅(qū)動(dòng)器內(nèi)部完成位置、速度與轉(zhuǎn)矩控制。
舉例,本次選擇往負(fù)方向的限位開(kāi)關(guān)機(jī)電機(jī)Z相脈沖作為矯正觸發(fā)條件,如下圖,其中0x6098選擇為1。
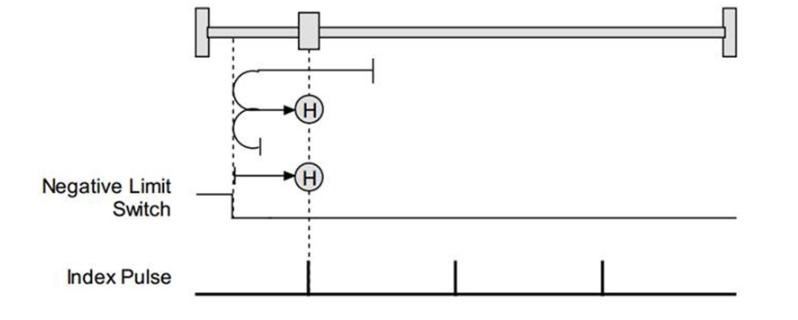
圖 3 所選擇的原點(diǎn)回零方式0x6098=1
2 注意:Copley這款驅(qū)動(dòng)器不能支持用戶(hù)單位和電機(jī)單位之間的自動(dòng)轉(zhuǎn)換,只能是自己推算一下右實(shí)際用戶(hù)需要的單位和電機(jī)單位之間的轉(zhuǎn)換參數(shù)。
-
CAN
+關(guān)注
關(guān)注
57文章
2917瀏覽量
467634 -
伺服電機(jī)
+關(guān)注
關(guān)注
88文章
2116瀏覽量
59610 -
伺服驅(qū)動(dòng)器
+關(guān)注
關(guān)注
22文章
525瀏覽量
32556 -
限位開(kāi)關(guān)
+關(guān)注
關(guān)注
0文章
50瀏覽量
5040 -
限位器
+關(guān)注
關(guān)注
0文章
5瀏覽量
1351
發(fā)布評(píng)論請(qǐng)先 登錄
伺服電機(jī)實(shí)現(xiàn)方向改變的方法
伺服電機(jī)靜電防護(hù)完整方案
伺服電機(jī)在數(shù)控機(jī)床中的使用
伺服電機(jī)在機(jī)器人中的應(yīng)用有哪些
伺服驅(qū)動(dòng)器與步進(jìn)電機(jī)的比較
其利天下技術(shù)·伺服電機(jī)編碼器的作用及工作原理·低壓伺服電機(jī)驅(qū)動(dòng)方案開(kāi)發(fā)

伺服電機(jī)原理及控制應(yīng)用
伺服電機(jī)有什么用,伺服電機(jī)可以當(dāng)普通電機(jī)用嗎
什么是伺服電機(jī)?伺服電機(jī)的工作原理是什么?
步進(jìn)電機(jī)的伺服控制方法有哪些
步進(jìn)電機(jī)伺服控制系統(tǒng)的作用
米思米直線(xiàn)電機(jī)模組:精準(zhǔn)回原點(diǎn),誤差無(wú)憂(yōu)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論