") 雙速異步電動(dòng)機(jī)的操控電路圖
雙速異步電動(dòng)機(jī)的操控電路圖

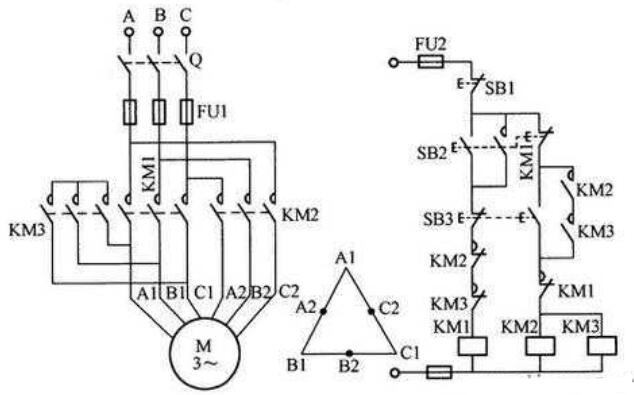
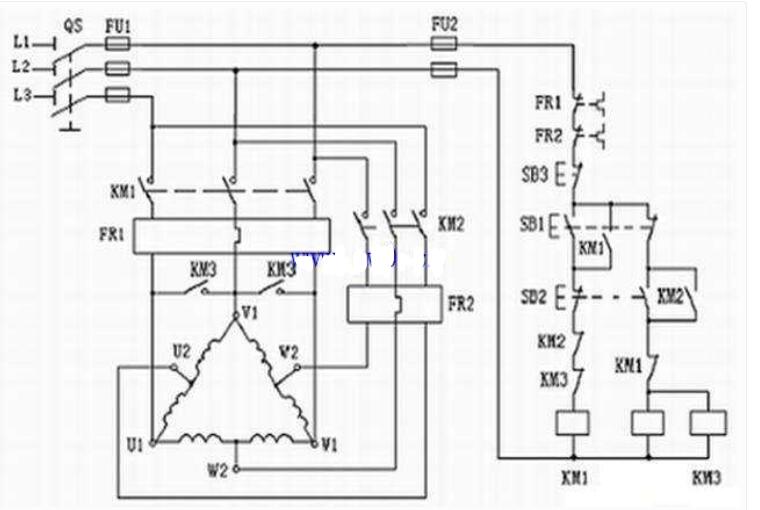
雙速異步電動(dòng)機(jī)改動(dòng)轉(zhuǎn)速可選用改動(dòng)繞組的接線辦法來完畢。如下圖所示的電路接線圖中,KM1為電動(dòng)機(jī)三角形聯(lián)觸摸摸器,KM2、KM3為雙星形連觸摸摸器,SB2為低速起動(dòng)按鈕,SB3為高速起動(dòng)按鈕。
合上電源開關(guān)Q,按下起動(dòng)按鈕SB2,接通觸摸器線圈KM1電源,一同堵截觸摸器KM2、KM3的電源,觸摸器KM1得電并自鎖,使電動(dòng)機(jī)定子繞組接成三角形,按低速起動(dòng)作業(yè)。
雙速異步電動(dòng)機(jī)建議操控電路圖
如需電動(dòng)機(jī)高速作業(yè),可按下按鈕SB3, KM1的線圈斷電開釋,主觸點(diǎn)斷開,自鎖觸點(diǎn)斷開,互鎖觸點(diǎn)閉合。當(dāng)SB3按終究時(shí),SB3的常開觸點(diǎn)閉合,觸摸器KM2、KM3線圈一同得電,經(jīng)KM2、KM3常開觸點(diǎn)串聯(lián)構(gòu)成的自鎖電路自鎖,KM2、KM3主觸點(diǎn)閉合,將電動(dòng)機(jī)定子繞組接成雙星形,以髙速度作業(yè)。
本電路可直接按下SB3,使定子繞組接成雙星形,以高速度作業(yè)。按下SB1電動(dòng)機(jī)接連旋轉(zhuǎn)。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
電動(dòng)機(jī)
+關(guān)注
關(guān)注
75文章
4162瀏覽量
98807 -
異步電動(dòng)機(jī)
+關(guān)注
關(guān)注
5文章
365瀏覽量
24917
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
雙速異步電動(dòng)機(jī)控制電路設(shè)計(jì)
本帖最后由 gk320830 于 2015-3-9 18:37 編輯
雙速異步電動(dòng)機(jī)控制電路設(shè)計(jì)及文字?jǐn)⑹觯ㄎ淖直M可能的多謝)求求各位高人了.謝謝了!手動(dòng)控制.和自動(dòng)控制(時(shí)間繼
發(fā)表于 05-08 12:40
尼古拉·特斯拉發(fā)明的異步電動(dòng)機(jī)
重量只及后者的二分之一,成本僅為三分之一。異步電動(dòng)機(jī)還容易按不同環(huán)境條件的要求,派生出各種系列產(chǎn)品。它還具有接近恒速的負(fù)載特性,能滿足大多數(shù)工農(nóng)業(yè)生產(chǎn)機(jī)械拖動(dòng)的要求。其局限性是,它的轉(zhuǎn)速與其旋轉(zhuǎn)磁場
發(fā)表于 10-12 10:35
繞線式異步電動(dòng)機(jī)的起動(dòng)
繞線式異步電動(dòng)機(jī)的起動(dòng)繞線式三相異步電動(dòng)機(jī)可以在轉(zhuǎn)子回路中串入電阻進(jìn)行起動(dòng),這樣就減小了起動(dòng)電流。一般采用起動(dòng)變阻器起動(dòng),起動(dòng)時(shí)全部電阻串入轉(zhuǎn)子電路中,隨著電動(dòng)機(jī)轉(zhuǎn)速逐漸加快,利用控制
發(fā)表于 10-15 10:49
單相異步電動(dòng)機(jī)和三相異步電動(dòng)機(jī)的維護(hù)有何不同
單相異步電動(dòng)機(jī)是指僅具有單相定子繞組并由單相交流電源供電的異步電動(dòng)機(jī),它是鼠籠式三相異步電動(dòng)機(jī)的衍生產(chǎn)品,其結(jié)構(gòu)與鼠籠型三相異步電動(dòng)機(jī)基本相同,轉(zhuǎn)子也是鼠籠式的。因此,單相
發(fā)表于 03-03 06:22
同步電動(dòng)機(jī)與異步電動(dòng)機(jī)有哪些不同之處
同步電動(dòng)機(jī)與異步電動(dòng)機(jī)的轉(zhuǎn)速有何不同?同步電動(dòng)機(jī)與異步電動(dòng)機(jī)轉(zhuǎn)動(dòng)的原理有何不同?同步電動(dòng)機(jī)與異步電動(dòng)機(jī)
發(fā)表于 07-29 08:02
三相異步電動(dòng)機(jī)的基本原理
原理三相異步電動(dòng)機(jī)運(yùn)行時(shí)的電磁過程三相異步電動(dòng)機(jī)的等效電路及相量圖三相異步電動(dòng)機(jī)的功率和轉(zhuǎn)矩三相異步電動(dòng)機(jī)的工作特性機(jī)器測取方法三相
發(fā)表于 09-01 08:38
對(duì)異步電動(dòng)機(jī)的仿真
異步電動(dòng)機(jī)的仿真-----JUST-17在課本中介紹的四種方式的狀態(tài)方程,都是對(duì)異步電動(dòng)機(jī)的數(shù)學(xué)描述,在進(jìn)行異步電動(dòng)機(jī)仿真時(shí),沒有必要對(duì)四種狀態(tài)方程逐一進(jìn)行,只要以其中一種作為內(nèi)核,在外圍加上
發(fā)表于 09-06 06:20
異步電動(dòng)機(jī)的機(jī)械特性是什么
異步電動(dòng)機(jī)的機(jī)械特性(轉(zhuǎn)速/轉(zhuǎn)矩-電流特性)發(fā)布日期:2012-09-22瀏覽次數(shù):180 我要投稿核心提示: 給定電壓下異步電動(dòng)機(jī)的機(jī)械特性曲線。因?yàn)槔斫庠撎匦郧€對(duì)理解和掌握異步電動(dòng)機(jī)的調(diào)速控制
發(fā)表于 09-06 08:25
異步電動(dòng)機(jī)星三角啟動(dòng)控制電路圖
下圖所示為異步電動(dòng)機(jī)、星三角起動(dòng)控制電路圖,此種接法只適合于電動(dòng)機(jī)正常運(yùn)行時(shí)為三角型聯(lián)接。 異步電動(dòng)機(jī)星三角啟動(dòng)控制電路圖 所需主要元器件
發(fā)表于 09-06 07:07
繞線式異步電動(dòng)機(jī)轉(zhuǎn)子串電阻起動(dòng)電路圖
繞線式異步電動(dòng)機(jī)轉(zhuǎn)子串電阻起動(dòng)電路圖
發(fā)表于 03-03 12:54
?6194次閱讀
三相雙速異步電動(dòng)機(jī)手動(dòng)操控電路
三相雙速異步電動(dòng)機(jī)手動(dòng)操控電路。圖中KM1為△接低速作業(yè)繼電器,KM2、KM3為YY接高速作業(yè)繼電器,SB1為△接低速主張作業(yè)按鈕,SB2為





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論