") 機(jī)器人或?qū)?shí)現(xiàn)快速抓取包裹的功能
機(jī)器人或?qū)?shí)現(xiàn)快速抓取包裹的功能

變色龍是移動(dòng)緩慢的蜥蜴,但它們的舌頭可以以驚人的速度加速,不給昆蟲(chóng)有逃逸的機(jī)會(huì)。受到這項(xiàng)非凡技能的啟發(fā), 韓國(guó)的研究人員開(kāi)發(fā)了一種可以迅速?gòu)棾龅?a target="_blank">機(jī)械舌,以迅速地從附近抓起東西。
他們?cè)O(shè)想這種被稱(chēng)為“搶奪者(Snatcher)”的工具將被無(wú)人機(jī)和機(jī)器人使用,它們需要在不太靠近它們的情況下收集物品。首爾國(guó)立科技大學(xué)(Seoul National University of Science and Technology,SeoulTech)的研究員、共同設(shè)計(jì)這種新裝置的Gwang-Pil Jung解釋說(shuō):“例如,帶有這種機(jī)械手的四旋翼機(jī)將能夠抓取遠(yuǎn)處的目標(biāo),而不只是盤(pán)旋和拾取。”
對(duì)于變色龍的舌頭,也有其他的研究,但是Snatcher的獨(dú)特之處在于它將變色龍舌頭的快速抓取性能整合到了便攜式的外形中,總尺寸為12 x 8.5 x 8.5厘米,重量不到120克。盡管如此,它仍能夠在600毫秒內(nèi)從80 厘米遠(yuǎn)處快速抓取30克重的東西。
為了創(chuàng)造Snatcher,Jung和SeoulTech的同事Dong-Jun Lee著手開(kāi)發(fā)一種類(lèi)似彈簧的裝置,它由主動(dòng)離合器和單系列彈性執(zhí)行器控制。由發(fā)條彈簧提供動(dòng)力,類(lèi)似于變色龍的舌頭的鋼制吊索穿過(guò)兩個(gè)齒輪式供料器。離合器是通過(guò)在驅(qū)動(dòng)前進(jìn)給器或后進(jìn)給器之間切換齒輪來(lái)允許單個(gè)彈簧在一個(gè)方向上退繞來(lái)驅(qū)動(dòng)射擊和縮回的裝置。
最終的結(jié)果是一個(gè)輕量級(jí)的抓取設(shè)備,它可以在600毫秒內(nèi)取回0.8米遠(yuǎn)的物體。Jung指出,其他一些設(shè)計(jì)用于檢索的現(xiàn)有設(shè)備能夠更快地完成任務(wù),大約300毫秒,但這些設(shè)計(jì)往往體積龐大。更加詳細(xì)的描述發(fā)表在7月21日的IEEE Robotics and Automation Letters上面。
“我們的最終目標(biāo)是將Snatcher安裝到商業(yè)無(wú)人機(jī)上,并實(shí)現(xiàn)有意義的工作,例如抓取包裹,”Jung說(shuō)。他們?nèi)匀恍枰鉀Q的一個(gè)挑戰(zhàn)是如何更有效地為驅(qū)動(dòng)系統(tǒng)供電。“為了解決這個(gè)問(wèn)題,我們正在尋找具有高能量密度的材料。”另一個(gè)改進(jìn)是設(shè)計(jì)了一種變色龍舌頭狀的抓取器,代替了當(dāng)前用于拾取物體的簡(jiǎn)單鉤子。Jung說(shuō):“我們計(jì)劃制造一種雙穩(wěn)態(tài)夾持器,一旦夾持器接觸到目標(biāo)物體,它就可以被動(dòng)地夾持目標(biāo)物體。”
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29709瀏覽量
212710
原文標(biāo)題:機(jī)器人變色龍的舌頭能快速抓取瞬間附近的物體
文章出處:【微信號(hào):IEEE_China,微信公眾號(hào):IEEE電氣電子工程師】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
明遠(yuǎn)智睿SSD2351開(kāi)發(fā)板:語(yǔ)音機(jī)器人領(lǐng)域的變革力量
盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
詳細(xì)介紹機(jī)場(chǎng)智能指路機(jī)器人的工作原理
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門(mén)的引路書(shū)
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開(kāi)源六軸機(jī)械臂產(chǎn)品
富唯智能最小復(fù)合機(jī)器人的強(qiáng)大抓取實(shí)力?

復(fù)合機(jī)器人抓取精度的影響因素及提升策略
名單公布!【書(shū)籍評(píng)測(cè)活動(dòng)NO.58】ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐
伺服電動(dòng)缸在人形機(jī)器人中的應(yīng)用
機(jī)器人如何實(shí)現(xiàn)移動(dòng)功能
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
機(jī)器人的語(yǔ)音功能
智能移動(dòng)機(jī)器人

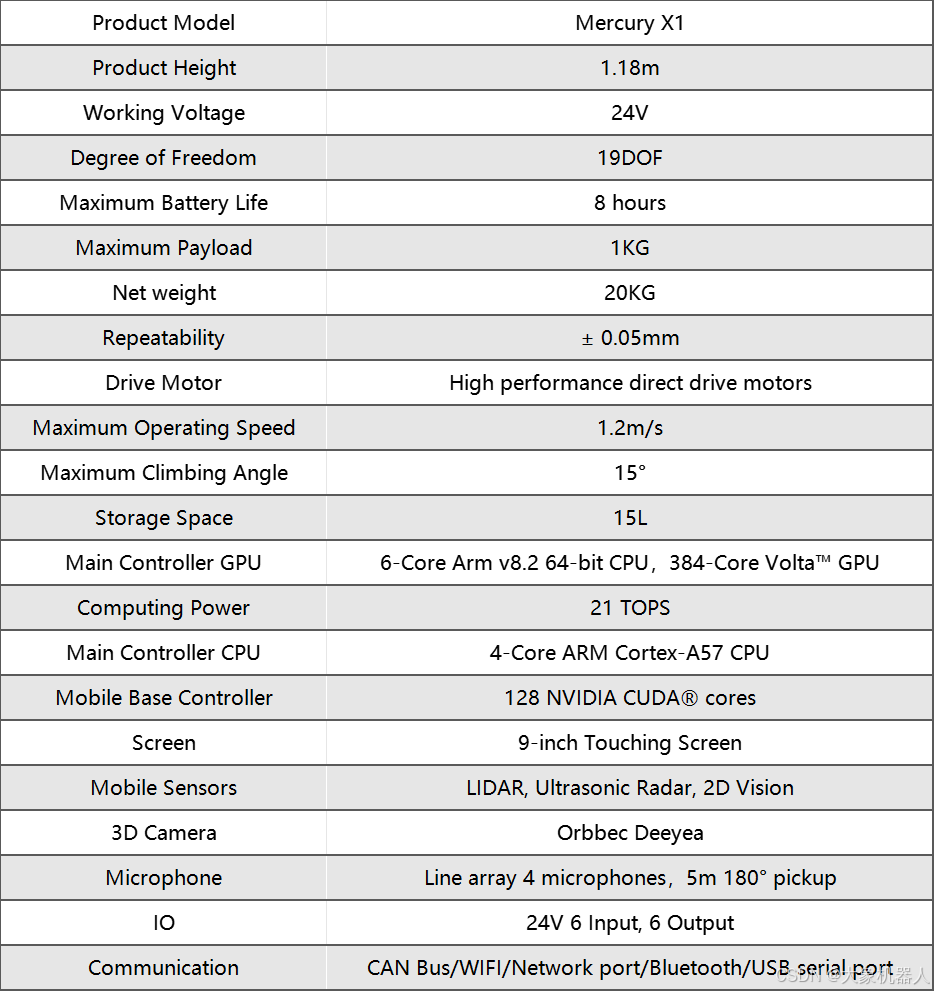
水星Mercury X1輪式人形機(jī)器人結(jié)合openc算法&STag標(biāo)記碼視覺(jué)系統(tǒng)實(shí)現(xiàn)精確抓取!





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論