") 暴雨天氣ADAS失靈,自動駕駛能避免傳感器失靈問題嗎?
暴雨天氣ADAS失靈,自動駕駛能避免傳感器失靈問題嗎?

電子發(fā)燒友網(wǎng)報道(文/程文智)今年新上的車型,大部分都配置了L2級智能駕駛輔助駕駛和網(wǎng)聯(lián)車機這兩項功能,這兩個功能不僅大大提升了行車的安全性,也的確給駕駛?cè)藥砹烁玫鸟{駛體驗。都說“由儉入奢易,由奢入儉難”,一旦我們體驗到了智能駕駛帶來的好處后,碰到智能輔助駕駛功能不能使用的時候就顯得異常難受。
南方8、9月份是臺風(fēng)比較多的月份,在這個時間段駕駛過汽車的人應(yīng)該深有體會,常常會在行車過程中,會碰到突如其來的暴雨“襲擾”。而在大雨中,L2智能輔助駕駛功能常常會受到限制。比如前幾天的深圳臺風(fēng)天,就有車主發(fā)朋友圈說他的駕駛輔助系統(tǒng)在大雨中失效了(見圖1)。
圖1:大雨中智能駕駛輔助系統(tǒng)失效提示。
小編隨手在網(wǎng)上搜索了下,發(fā)現(xiàn)這位網(wǎng)友碰到的情況其實不是個案,不少車主都碰到了這樣的問題,有車主還在車質(zhì)網(wǎng)上進行了投訴。
圖2:車主在車質(zhì)網(wǎng)上投訴駕駛輔助系統(tǒng)失靈。(來源:車質(zhì)網(wǎng))
L2級的智能駕駛輔助系統(tǒng)一般配備了哪些傳感器,為何會在大雨中就不能工作了呢?
L2級智能輔助駕駛系統(tǒng)為何會失效?
L2級智能輔助駕駛系統(tǒng)在硬件方面比較常規(guī)的硬件包括前雷達、前攝像頭和后雷達。其中后雷達實現(xiàn)的功能最主要的就是盲區(qū)檢測,即側(cè)后方既不在側(cè)窗視野中,也不在后視鏡中能看到的區(qū)域,還有開門預(yù)警(開門時,監(jiān)測候方來車)、后碰撞預(yù)警等其他功能。
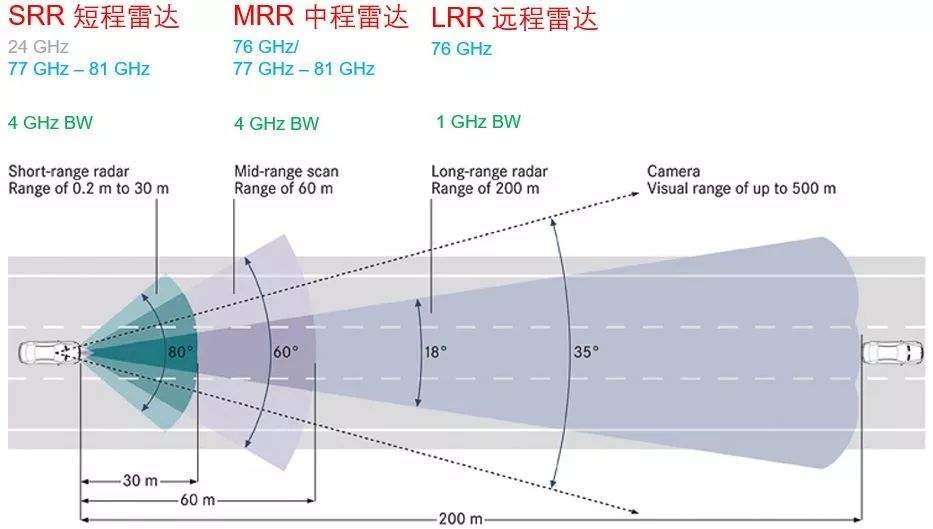
圖3:毫米波雷達探測距離。
汽車前向傳感器方面有些復(fù)雜,不同的供應(yīng)商的原理有些不同,主流的有單雷達、雷達+攝像頭、單攝像頭等方案。在雷達+攝像頭方案中,常規(guī)做法是前雷達主要負(fù)責(zé)障礙物和車輛識別,由于雷達受環(huán)境影響較小,目標(biāo)識別準(zhǔn)確度高,大部分車輛的主動安全碰撞預(yù)警和主動緊急制動功能都是基于雷達的目標(biāo)來觸發(fā)。同時雷達還會負(fù)責(zé)ACC自適應(yīng)巡航等控制。而前攝像頭主要負(fù)責(zé)車道線識別、限速標(biāo)識識別、靜止目標(biāo)識別、以及障礙物類型識別等功能,車輛轉(zhuǎn)向控制如車道保持、車道偏離提示、限速提示、自動遠近光等功能都是通過攝像頭實現(xiàn)。目前部分供應(yīng)商嘗試通過攝像頭來實現(xiàn)雷達+攝像頭的所有功能,并通過軟件優(yōu)化來提升在多種光照條件下的攝像頭識別能力,以降低L2智能駕駛輔助系統(tǒng)的成本。
在雷達部分,目前有毫米波雷達、超聲波雷達和激光雷達幾種。不過由于毫米波穿透霧、煙、灰塵的能力強,具有全天候(大雨天除外)特性和低成本原因,在L1到L5級別的ADAS系統(tǒng)中都將有一席之地。特別是在現(xiàn)階段的L1/L2智能駕駛輔助系統(tǒng)中,主要是毫米波雷達和攝像頭組成,毫米波雷達能探測目標(biāo)的距離速度和角度,而攝像頭則可以識別交通信號、車道線,對場景進行語義分割,兩者結(jié)合在一起可以實現(xiàn)比較穩(wěn)定的目標(biāo)檢測、跟蹤與分類。車規(guī)認(rèn)證和適用性方面都能滿足L2+級別ADAS的系統(tǒng)需求。
但是毫米波也有一個缺點,那就是雨霧對它的影響非常大,吸收很厲害,所以在有雨有霧的天氣,毫米波雷達的性能會大大下降。這也就是為什么在大雨天氣L2級別的智能駕駛輔助系統(tǒng)傳感器失效的原因所在。
英飛凌的何為指出,目前L2級別的毫米波雷達的確容易受到雨霧天氣的影響,這主要是由于成本因素考量,選擇的是滿足日常需求的毫米波雷達,如果要選擇可以應(yīng)付暴風(fēng)雨情況的雷達,成本會上升不少。
自動駕駛會受影響嗎?
其實隨著自動駕駛級別的提升,汽車中的傳感器數(shù)量也會逐漸增多,到L4/L5的自動駕駛階段,雷達數(shù)量將會超過10個、攝像頭數(shù)量將會超過8個、激光雷達也將不止1個,通過這些多傳感器的數(shù)據(jù)融合,來應(yīng)對不同路況、不同氣候條件下的數(shù)據(jù)收集。
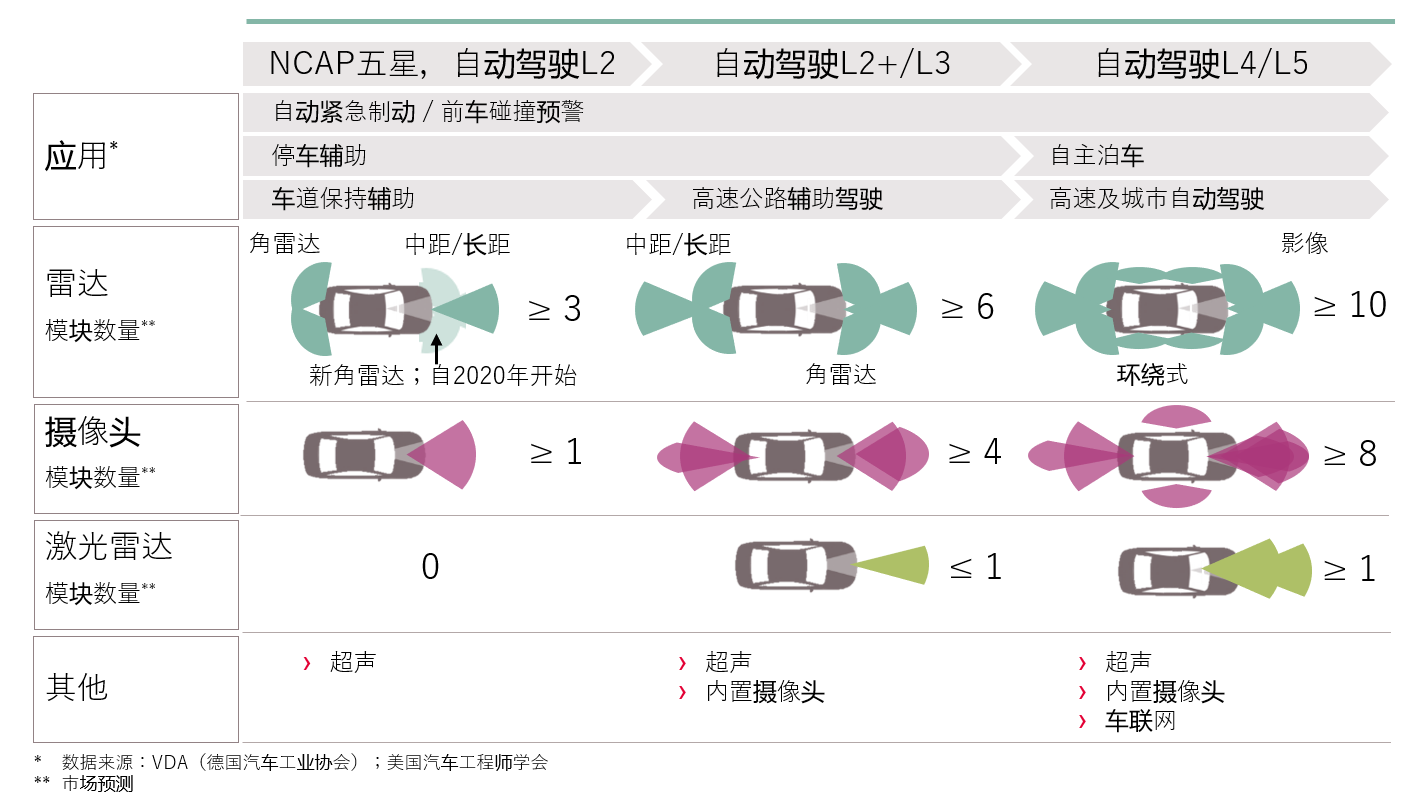
圖4:未來幾年,隨著自動駕駛程度的提高,汽車需要的傳感器數(shù)量也越來越多。(來源:英飛凌)
其中,激光雷達由于極高的角度分辨率,在自定位和地圖構(gòu)建方面都具有較大優(yōu)勢,所以在L3以上的自動駕駛中,它將會跟毫米波雷達,攝像頭,超聲波雷達等傳感器組成互為冗余的系統(tǒng)。
根據(jù)嶺緯科技的芮明昭介紹,該公司的已經(jīng)量產(chǎn)的激光雷達不僅可以點云成像,還能在大暴雨情況下仍能實現(xiàn)400~500米范圍內(nèi)的物體檢測。
圖5:嶺緯科技的激光雷達點云成像演示。
英飛凌的專家認(rèn)為,解決自動駕駛汽車應(yīng)對不同路況和天氣的措施有以下三種:
一是需要建立針對特殊場景的用戶、和對這個場景理解的數(shù)據(jù)庫的積累。比如,歐洲有很多的山路,所以他們在驗證無人駕駛的天氣和道路的時候,整車廠就開始收集這方面的數(shù)據(jù),包括通過點云的數(shù)據(jù)收集,配合用戶的反饋不斷完善。相信隨著用戶數(shù)據(jù)和場景經(jīng)驗的積累,可以有效地幫助我們收集更多數(shù)據(jù),積累經(jīng)驗。
二是,智能駕駛不僅僅是毫米波雷達一種單一的技術(shù)。在L3甚至更高級別的智能駕駛時代,可以看到多種傳感器,包括毫米波雷達和激光雷達,越來越多不同技術(shù)類型的傳感器會被加入到ADAS系統(tǒng)當(dāng)中,作為冗余或者是補充,所以傳感器類型的擴充會幫我們更有效地收集外部環(huán)境和道路狀況的信息。
三是算法的優(yōu)化。隨著數(shù)據(jù)庫和傳感器收集的信號的不斷積累,可以搭建一個新的框架。這個框架會將不同的數(shù)據(jù)進行分類,做算法的優(yōu)化和驗證。
相信通過反復(fù)的驗證和優(yōu)化下,應(yīng)該可以最終解決特殊極端天氣和復(fù)雜路面的問題,從而讓自動駕駛時代能夠順利到來。
結(jié)語
其實毫米波雷達技術(shù)也在不斷進步中,據(jù)說毫米波雷達未來的制造工藝將會邁向28nm等更先進制程,性能也會更加優(yōu)秀,再加上激光雷達等其他傳感器的組合,應(yīng)該足以應(yīng)付自動駕駛對傳感器的需求。
本文由電子發(fā)燒友網(wǎng)原創(chuàng),未經(jīng)授權(quán)禁止轉(zhuǎn)載。如需轉(zhuǎn)載,請?zhí)砑游⑿盘杄lecfans999。
-
傳感器
+關(guān)注
關(guān)注
2564文章
52792瀏覽量
765391 -
adas
+關(guān)注
關(guān)注
310文章
2249瀏覽量
210056 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14265瀏覽量
170163
發(fā)布評論請先 登錄
ADAS高級駕駛輔助系統(tǒng)

物聯(lián)網(wǎng)中的傳感器類型解析 傳感器類型在自動駕駛中的應(yīng)用
多傳感器融合在自動駕駛中的應(yīng)用趨勢探究


MEMS技術(shù)在自動駕駛汽車中的應(yīng)用

自動駕駛HiL測試方案案例分析--ADS HiL測試系統(tǒng)#ADAS #自動駕駛 #VTHiL








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論