") CPLD設計故障異步時鐘域處理案例分析
CPLD設計故障異步時鐘域處理案例分析
麻雀雖小,五臟俱全。CPLD規(guī)模雖小,其原理和設計方法和FPGA確是一樣的。輕視在CPLD上的投入,就有可能存在設計隱患,導致客戶使用產(chǎn)品時出現(xiàn)故障,從而給公司帶來不可挽回的信譽損失。
近一段時間,我遇到了兩個CPLD設計故障,這兩個故障的根因(root cause)是一樣的。其中的一個故障發(fā)生在實驗室測試階段,另一個發(fā)生在運營商的網(wǎng)絡上,造成了非常不好的負面影響,因此引起了高度重視,必須徹底找出原因并消除。雖然可以很容易讓故障不復現(xiàn),但是要想找到根因,并給相關人員解釋清楚, 卻并不是一件容易的事情。
問題代碼:
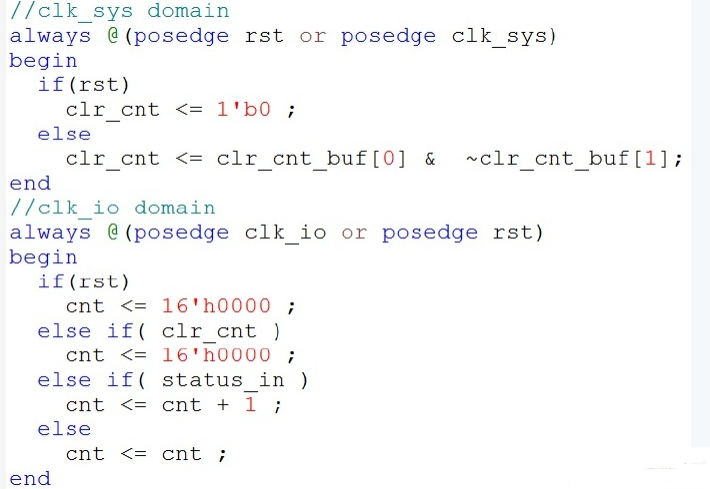
圖 1. 問題代碼截圖
這段代碼的功能是統(tǒng)計 輸入信號’status_in’ 的高電平持續(xù)時間。CPU寫相應的寄存器產(chǎn)生’clr_cnt’把”cnt”清零。同時,也會把”cnt”的值給回讀到CPU。實際上就是一個讀清操作。
很明顯,這里有一個問題,就是異步時鐘域處理的問題。’clr_cnt’的時鐘為’clk_sys’,而”cnt”的時鐘為’clk_io’, ‘clk_sys’和’clk_io’是異步的,沒有確定的相位關系。
測試方法:
測試中,CPU循環(huán)執(zhí)行以下四步。
1) 清零: CPU通過Local Bus寫寄存器,產(chǎn)生’clr_cnt’脈沖,把”cnt”清零;
2) 計數(shù): CPU等待一段時間。“cnt” 開始對外部輸入 ‘status_in’ 計數(shù);
3) 回讀: CPU通過Local Bus讀取 ”cnt” 值;
4) 循環(huán): goto 1)。
實際實現(xiàn)可能略有不同,CPLD邏輯在執(zhí)行清零1)的同時會把”cnt”的值鎖存下來,供CPU回讀,也就是1)和3)也可以是一個步驟。這樣表述是為了突出問題代碼。
問題描述:
如果’status_in’ 恒為低電平’0’輸入, 那么”cnt”應該恒為零值。可是,客戶發(fā)現(xiàn)一個非常奇觀的現(xiàn)象。測試中,讓 ‘status_in’ 恒為低電平’0’輸入時,客戶發(fā)現(xiàn)CPU會低概率的回讀到非零的”cnt”值。朋友們,你們能解釋這種現(xiàn)象嗎?
初步分析:
‘status_in’恒為零,不可能引起”cnt”變化。
‘clr_cnt’在測試中是翻轉(zhuǎn)變化的。’clr_cnt’是從’clk_sys’時鐘域來的信號。而時鐘’clk_sys’和時鐘’clk_io’是異步關系,沒有固定的相位關系。也就是說’clr_cnt’是可能違反觸發(fā)器”cnt”的建立/保持時間要求的,進而出現(xiàn)亞穩(wěn)態(tài)。
但是有人認為, “cnt”的值原來是零,“clr_cnt”只是把”cnt”的值清零, 這樣來說觸發(fā)器“cnt”的輸入根本沒有發(fā)生過變化,怎么可能有亞穩(wěn)態(tài)事件? 而且故障出現(xiàn)的概率很高,遠比亞穩(wěn)態(tài)的概率高,好像也不能用亞穩(wěn)態(tài)來解釋。
問題根因:
要解釋問題的真正原因,必須要知道 ”cnt” 對應的電路網(wǎng)表是什么樣的。”cnt”電路網(wǎng)表由綜合工具(synthesis)生成,可以在綜合工具中查看電路圖, 圖2是網(wǎng)表的局部放大。
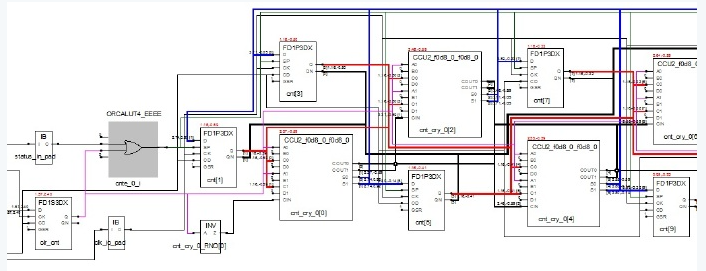
圖 2. “cnt”的Technology View電路
圖2中調(diào)用了進位鏈模塊,看起來很亂,整理一下, 手工簡化一下如圖3。
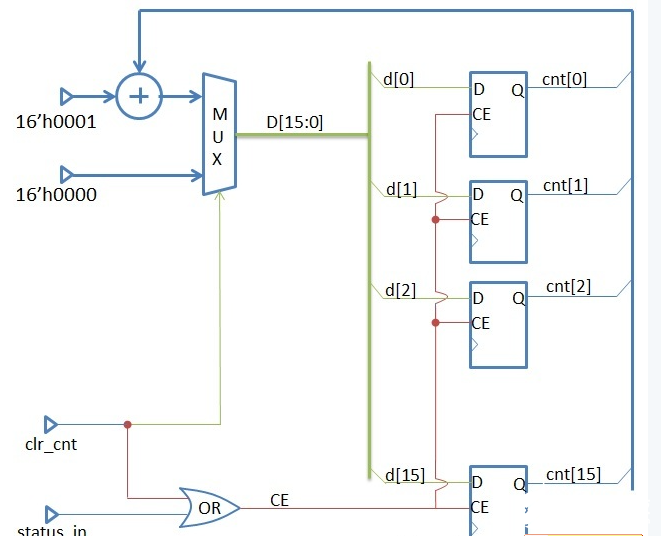
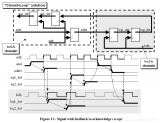
圖 3. 手工簡化的“cnt”的電路圖
圖3中,可以看到,’clr_cnt’和’status_in’相或的結(jié)果控制觸發(fā)器的使能端(‘CE’)。另外,’clr_cnt’還決定了觸發(fā)器輸入(‘D’)是”cnt+1”還是”0”。真值表如下。
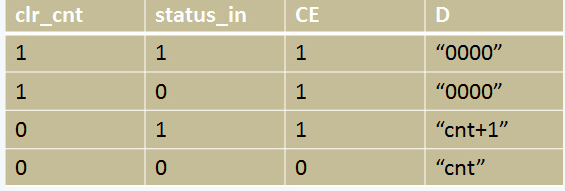
也許和你想象中的不一樣,電路使用了觸發(fā)器的兩個輸入端’D’和’CE’,而不是單單一個’D’端。于是,’clr_cnt’的跳變引起了’D’/’CE’的跳變。
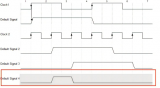
為了說明問題方便,定義 ‘clr_cnt’ 跳變的時刻為t0,這個跳變事件傳播到觸發(fā)器’CE’端的時刻為t1, 傳播到觸發(fā)器’D’端的時刻為t2。見圖4。
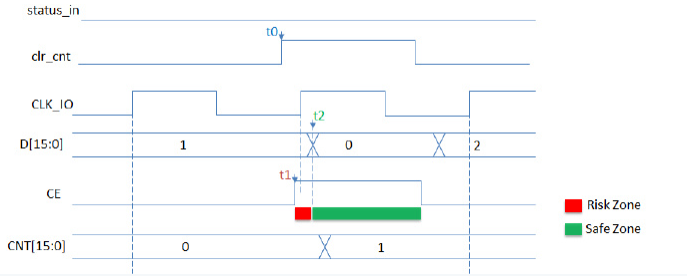
圖4. “cnt”觸發(fā)器時序違反的演示
圖4中的場景, t2》t1》t0。 最初的時候,”cnt”的值為hex”0000”,”cnt+1”的值為hex”0001”。 由于’clk_io’的上升沿落在t1和t2之間, 因此”cnt”錯誤地跳變?yōu)閔ex”0001”。
一個布局布線后的設計,一般情況下CE的傳播延時(t1-t0)不會等于D的傳播延時(t2-t0)。由于’clk_io’和’clk_sys’之間的相位關系是隨機的, 肯定會出現(xiàn)’clk_io’的上升沿剛好位于t1和t2之間的情況。這種情況下,觸發(fā)器CNT[15:0]就會錯誤的采樣到”cnt+1”,而不是期望的hex”0000”值。
忽略次要參數(shù)和亞穩(wěn)態(tài)事件,故障出現(xiàn)的概率可以被估算為 (t2-t1)/TCLK_IO 。(t2-t1)越大,故障概率越高。這就是為什么故障出現(xiàn)的概率這么高的原因。
顯然,對于t2
對于t2=t1的情況(應該沒有可能),只有當’clk_io’采樣到’D’/’CE’的邊沿附近時,引起亞穩(wěn)態(tài)事件,CNT才會出錯,當然這種故障的概率會低的多。
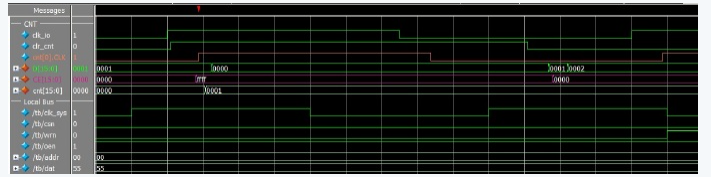
圖5. “cnt”觸發(fā)器的后仿真時序違反演示
解決措施
通過以上的分析,問題是由于信號跨異步時鐘域而產(chǎn)生了模糊的時序關系,布局布線工具無法也不可能分析出這種時序要求,只能從代碼上加以處理。
1.同步化
一個很成熟的異步信號同步化方法就是多拍處理。見圖6。
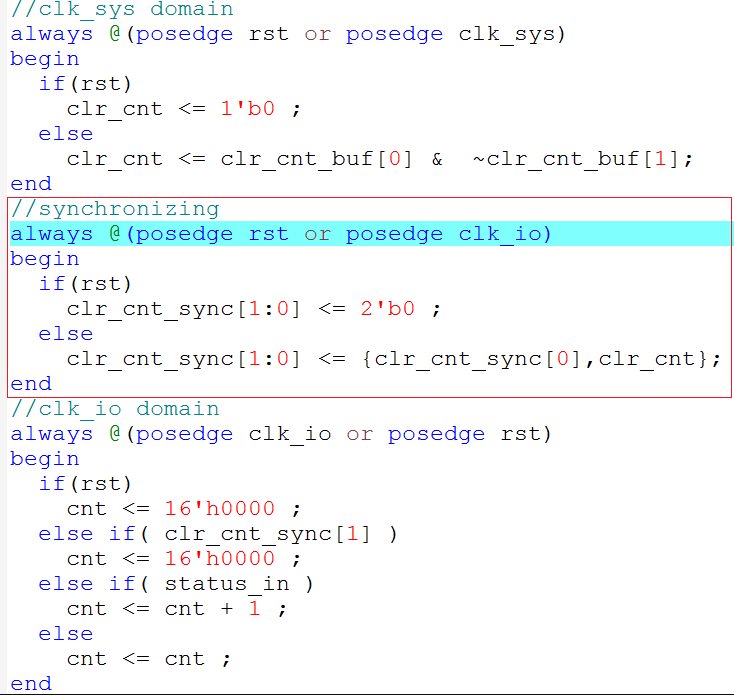
圖6. 優(yōu)化過后的代碼
‘clr_cnt’經(jīng)過同步化后, ’clr_cnt_sync’會在’clk_io’上升沿之后很短的時間內(nèi)穩(wěn)定下來。布局布線工具通過利用’clk_io’的時鐘周期,去約束’clr_cnt_sync’到’D’和’CE’的路徑。從而不會出現(xiàn)”cnt”非零的錯誤。
如果’status_in’也是異步的信號,原理是一樣的,會引起計數(shù)的不準確,只是故障更隱蔽,同樣需要同步化。如果’status_in’是同步的引腳輸入,必須通過時序約束告知布局布線工具,’status_in’相對于’clk_io’的建立時間和保持時間。
2.禁止CE
有人提出過一種偽辦法,我們來討論一下。就是約束綜合工具,禁止使用觸發(fā)器的’CE’功能。這樣,觸發(fā)器只有D端口, 且D = ( clr_cnt ) ? “0000” : ( status_in ) ? cnt+1 : cnt 。
當’status_in’==0且”cnt”=”0000”時,D = ( clr_cnt ) ? “0000” : cnt = ”0000”,此時,’clr_cnt’的跳變不會引起D端口上出現(xiàn)跳變,也就不會出現(xiàn)錯誤的采樣。
這樣做局限性很大,首先限制了”cnt”=”0000”的狀態(tài)才適用, 如果”cnt”的當前狀態(tài)非零,一樣會有問題,只是錯誤會跟隱蔽。再者,使用CE端口可以降低邏輯級數(shù),改善時序,節(jié)省面積,實際上可能的情況下應該盡量使用。
因此禁止CE的手段是不能作為解決措施的。
編輯:hfy
-
FPGA
+關注
關注
1643文章
21967瀏覽量
614257 -
電路圖
+關注
關注
10402文章
10732瀏覽量
540848 -
cpld
+關注
關注
32文章
1257瀏覽量
171032 -
cpu
+關注
關注
68文章
11038瀏覽量
216036 -
觸發(fā)器
+關注
關注
14文章
2032瀏覽量
61886
發(fā)布評論請先 登錄
跨異步時鐘域處理方法大全
變頻器諧波引發(fā)系統(tǒng)電源故障分析與處理

電機接地故障的分析與處理
常見 CPLD 故障排除方法
CPLD 優(yōu)勢與劣勢分析
CPLD 應用場景分析
混合域示波器的原理和應用
用CPLD輸出(3.3V)作TLC5510A的時鐘,為什么CPLD和板子共地,芯片就發(fā)熱?
變頻器過熱故障原因分析與處理措施

pcm1794能否支持異步時鐘模式?
如何處理時鐘電路的常見故障
開源芯片系列講座第22期:異步電路機制為RISC-V處理器賦能

直播預告 |開源芯片系列講座第22期:異步電路機制為RISC-V處理器賦能





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論