") 新型遙操作系統(tǒng):雙腿機(jī)器人借用人類技能可敏捷性移動(dòng)
新型遙操作系統(tǒng):雙腿機(jī)器人借用人類技能可敏捷性移動(dòng)

MIT的小愛(ài)馬仕想借用你的大腦
麻省理工學(xué)院(MIT)的研究人員展示了一種新型遙操作系統(tǒng)(teleoperation system),可以讓雙腿機(jī)器人“借用”人類的身體技能,從而以更大的敏捷性移動(dòng)。這個(gè)系統(tǒng)的工作原理有點(diǎn)像斯皮爾伯格電影《頭號(hào)玩家》中的觸覺(jué)套裝,不過(guò)電影中的套裝是用來(lái)連接人類與虛擬化身的,而麻省理工學(xué)院的這個(gè)套裝則將人類連接到一個(gè)真正的機(jī)器人上。
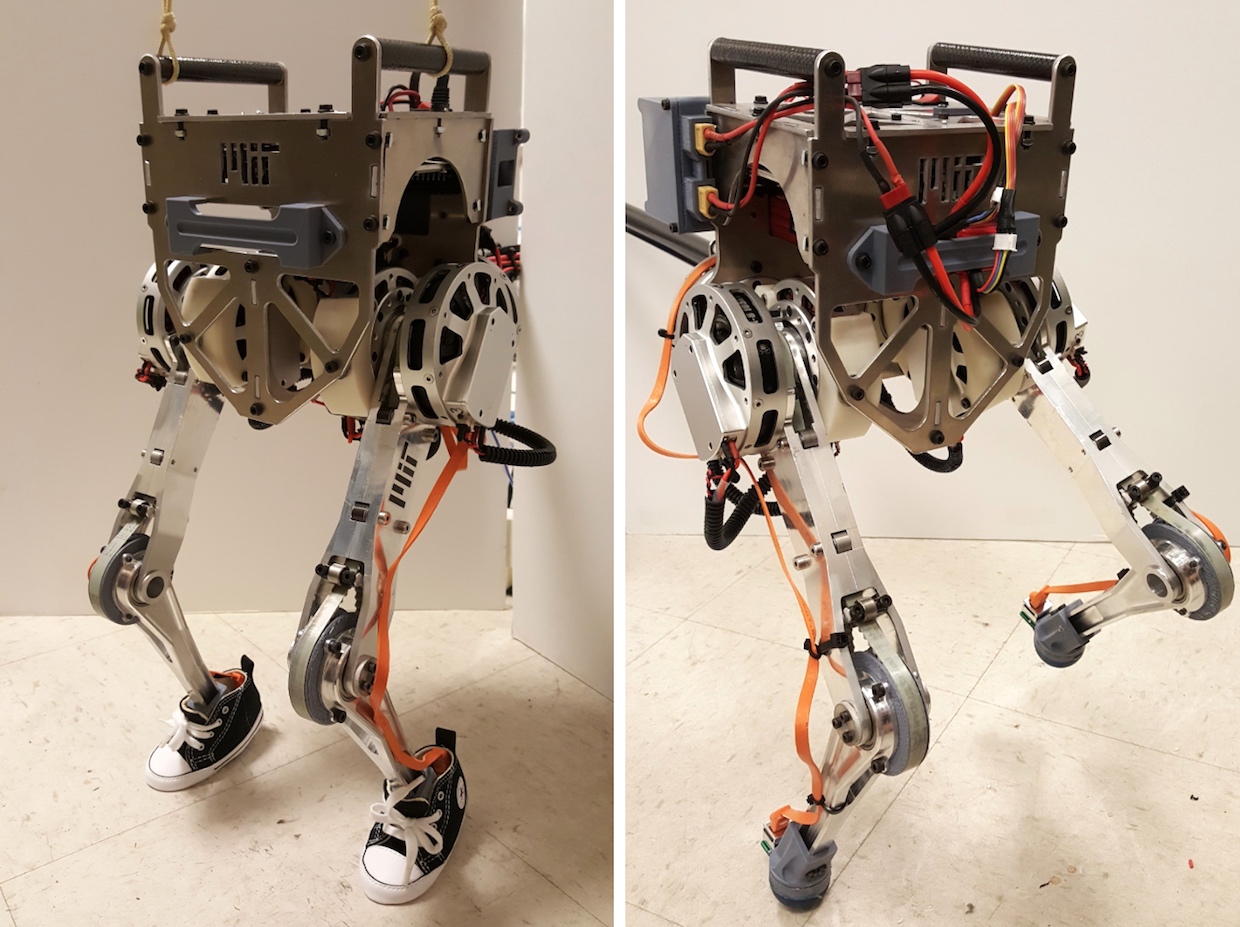
這個(gè)機(jī)器人的名字叫“小愛(ài)馬仕( Little HERMES )”,目前只有一對(duì)小腿,體積約是普通成年人的三分之一。在龍門(mén)架的支撐下,它可以原地踏步和跳躍,也可以短距離行走。雖然這本身沒(méi)有什么特別的,但研究人員說(shuō),他們的方法可以幫助那些有強(qiáng)大能力的救災(zāi)機(jī)器人更接近現(xiàn)實(shí)。他們補(bǔ)充道,盡管最近機(jī)器人技術(shù)取得了一些發(fā)展,但制造像人類一樣運(yùn)動(dòng)和決策的全自主機(jī)器人仍然是一項(xiàng)挑戰(zhàn)。而一個(gè)更先進(jìn)的遠(yuǎn)程操作系統(tǒng)可以幫助實(shí)現(xiàn)這個(gè)目標(biāo)。
現(xiàn)任伊利諾伊大學(xué)-香檳分校的助理教授 Jo?o Ramos和MIT仿生機(jī)器人實(shí)驗(yàn)室主任Sangbae Kim在本周的《科學(xué)機(jī)器人( Science Robotics)》雜志上描述了這個(gè)項(xiàng)目。他們?cè)谡撐闹兄赋觯F(xiàn)有的遙操作系統(tǒng)常常不能有效地把操作員的運(yùn)動(dòng)匹配到機(jī)器人的運(yùn)動(dòng)。此外,傳統(tǒng)的系統(tǒng)沒(méi)有向遙操作人員提供關(guān)于機(jī)器人正在做什么的物理反饋。他們的新方法解決了這兩個(gè)局限性,為了在實(shí)踐中驗(yàn)證,他們建造了小愛(ài)馬仕機(jī)器人。
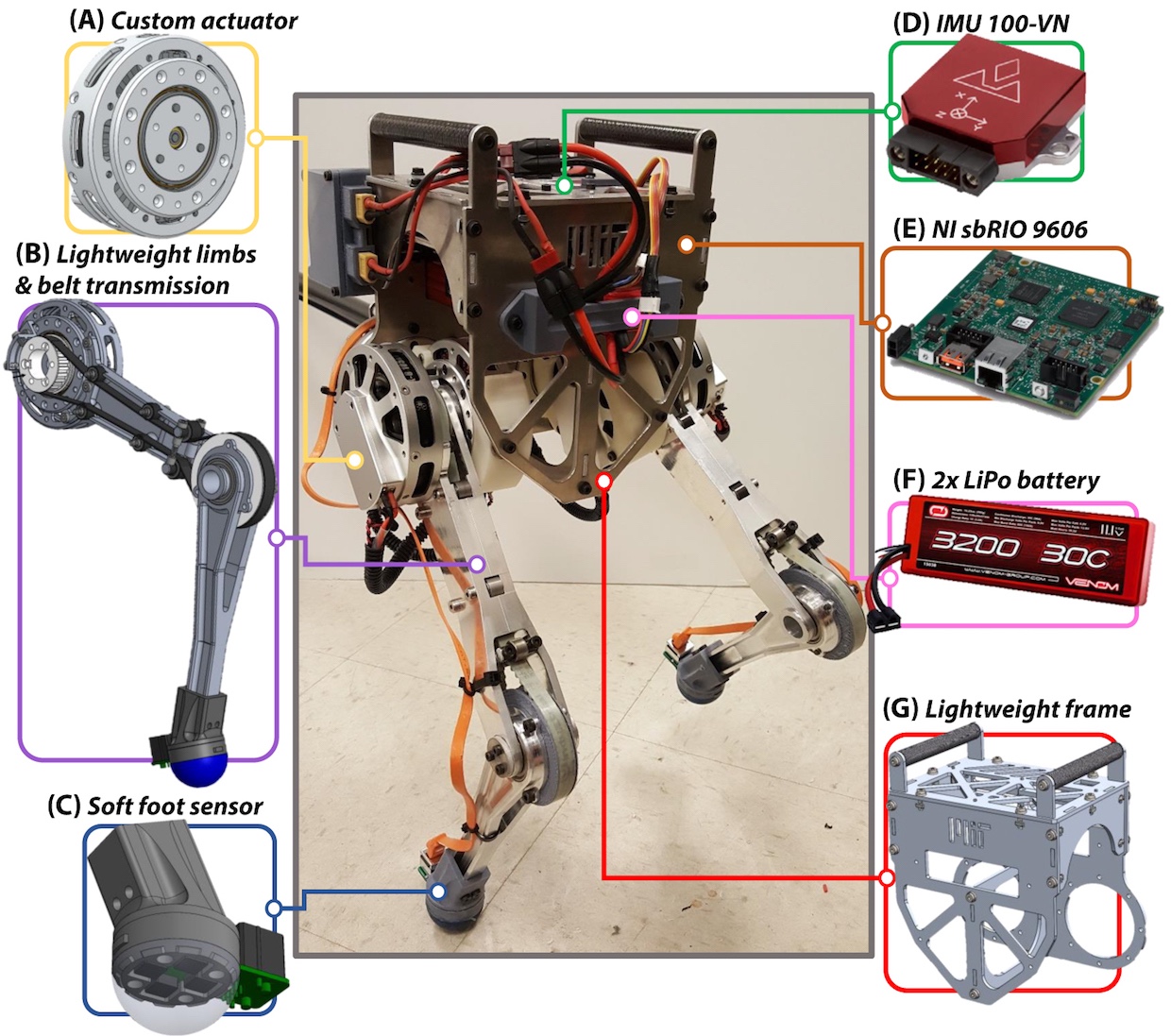
“小愛(ài)馬仕”雙足機(jī)器人的主要部件
如上圖所示,“小愛(ài)馬仕”雙足機(jī)器人的主要部件有:(a)被設(shè)計(jì)成能夠承受沖擊和產(chǎn)生高扭矩的定制驅(qū)動(dòng)器。(b)具有低慣性和快速擺動(dòng)能力的輕質(zhì)肢體。(c)耐沖擊和輕量級(jí)的具有三軸接觸力傳感器的足部傳感器。(d)用來(lái)估計(jì)機(jī)器人的軀干姿態(tài)、角速度和線性加速度的加固型IMU(慣性測(cè)量單元)。(e)來(lái)自美國(guó)國(guó)家儀器(National Instruments)的實(shí)時(shí)計(jì)算機(jī)sbRIO-9606。(f)兩個(gè)串聯(lián)的三芯鋰聚合物電池。(g)使機(jī)器人質(zhì)量最小化的剛性輕質(zhì)框架。
今年早些時(shí)候,麻省理工學(xué)院的研究人員為IEEE Spectrum撰寫(xiě)了一篇關(guān)于該項(xiàng)目的深入文章,其中包括小愛(ài)馬仕(Little HERMES)和它的“大兄弟”大愛(ài)馬仕(即HERMES,用于高效的機(jī)器人機(jī)制和機(jī)電系統(tǒng))。在那篇文章中,他們描述了系統(tǒng)的兩個(gè)主要部件:
“…我們正在創(chuàng)建一個(gè)遙機(jī)器人系統(tǒng),它有兩個(gè)部分:一個(gè)是能夠敏捷行動(dòng)的仿人機(jī)器人,另一個(gè)是一種新型的雙向人機(jī)界面,它將你的動(dòng)作發(fā)送給機(jī)器人,也將機(jī)器人的動(dòng)作發(fā)送給你。因此,如果機(jī)器人踩到碎片上開(kāi)始失去平衡,操作者也會(huì)感到同樣的不穩(wěn)定并本能地做出反應(yīng)避免摔倒。然后,我們捕捉到這個(gè)物理反應(yīng)并將其發(fā)送回機(jī)器人,這也有助于機(jī)器人避免摔倒。通過(guò)這種‘人-機(jī)’的連接,機(jī)器人可以利用操作者天生的運(yùn)動(dòng)技能和瞬間的反應(yīng)來(lái)站穩(wěn)腳跟。
你可以說(shuō)我們把人腦放進(jìn)了機(jī)器里。”
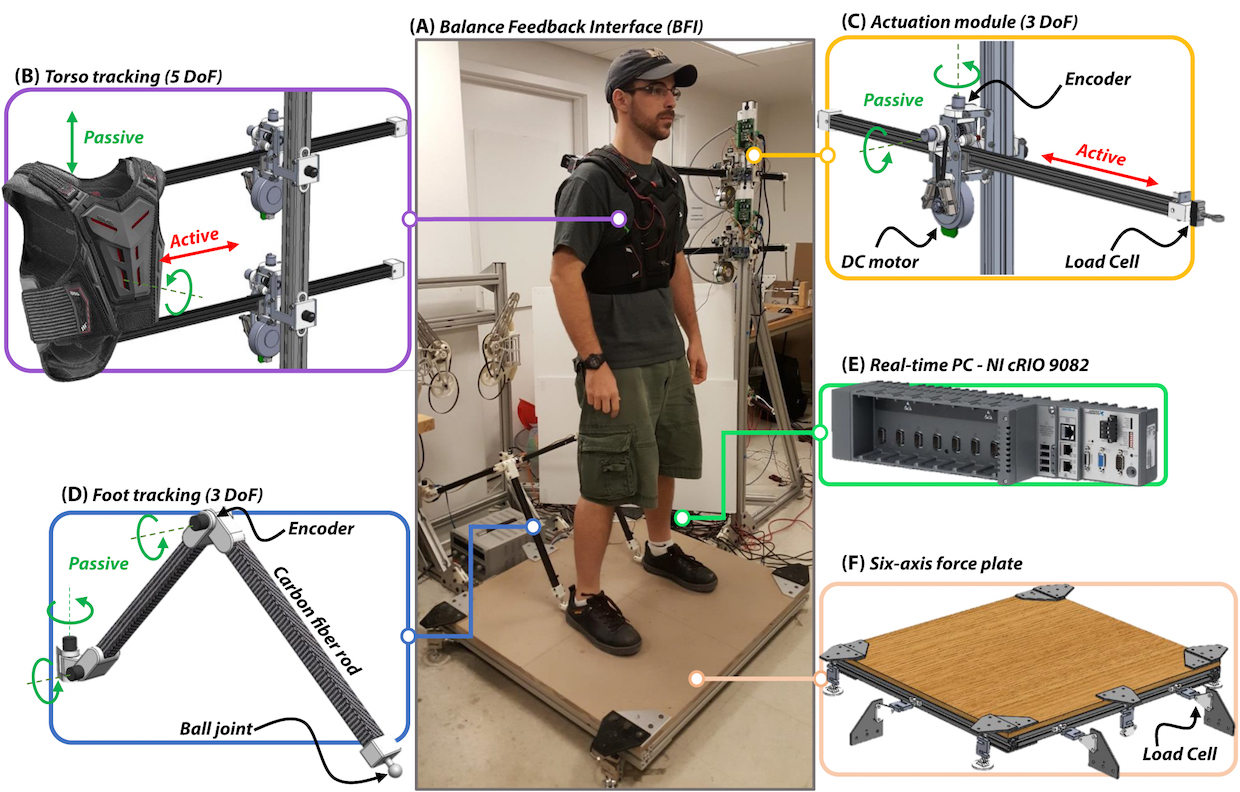
平衡反饋接口(BFI)的主要模塊,圖來(lái)自:Science Robotics
MIT的研究人員為控制小愛(ài)馬仕而創(chuàng)建的人機(jī)界面不同于傳統(tǒng)人機(jī)界面,它依靠操作者的反應(yīng)來(lái)提高機(jī)器人的穩(wěn)定性。研究人員稱之為平衡反饋接口(BFI,Balance-Feedback Interface)。如上圖所示,BFI的主要模塊包括:(A)軀干和足部的定制化接口附件,用于高速(1kHz)捕獲人體運(yùn)動(dòng)數(shù)據(jù)。(B)兩個(gè)欠驅(qū)動(dòng)模塊,用于跟蹤軀干的位置和方向,并向操作員施力。(C)每個(gè)驅(qū)動(dòng)模塊有三個(gè)自由度,其中一個(gè)是由直流無(wú)刷電機(jī)驅(qū)動(dòng)的推桿/拉桿。(D)一系列帶有被動(dòng)關(guān)節(jié)的鏈環(huán),與操作者足部相連并跟蹤其空間平移。(E)來(lái)自美國(guó)國(guó)家儀器(National Instruments)的實(shí)時(shí)控制器CRIO-9082,以關(guān)閉BFI的控制回路。(F)測(cè)力板,用于估計(jì)操作員的壓力中心位置,并測(cè)量操作員凈接觸力的切向力和法向力。
在《科學(xué)機(jī)器人》的新論文中,麻省理工學(xué)院的研究人員解釋了他們?nèi)绾谓鉀Q遠(yuǎn)程操作系統(tǒng)有效性的關(guān)鍵挑戰(zhàn)之一:
“這一策略的挑戰(zhàn)在于將人體運(yùn)動(dòng)正確地映射到機(jī)器上,同時(shí)告知操作者機(jī)器人復(fù)制的運(yùn)動(dòng)有多接近。因此,我們?yōu)殡p邊反饋策略提出了一種解決方案,以控制兩足機(jī)器人與人類操作者同步進(jìn)行踏步、跳躍和行走。這種動(dòng)態(tài)同步是通過(guò)(i)將人類運(yùn)動(dòng)數(shù)據(jù)的核心部分實(shí)時(shí)縮放到機(jī)器人的比例,以及(ii)對(duì)操作者施加與人機(jī)之間的相對(duì)速度成比例的反饋力來(lái)實(shí)現(xiàn)的。”
講真,小愛(ài)馬仕現(xiàn)在正在邁出它的第一步,但研究人員說(shuō),他們希望使用類似設(shè)計(jì)的“機(jī)器腿”作為一個(gè)更先進(jìn)的仿人機(jī)器人的一部分。他們的愿景是:創(chuàng)造一種快速移動(dòng)穿越各種地形的四足機(jī)器人,然后在需要時(shí)變形成兩足機(jī)器人,用“手”進(jìn)行靈巧的操作。這可能需要融合MIT研究人員在實(shí)驗(yàn)室里創(chuàng)造的一些其他機(jī)器人,比如在獵豹和愛(ài)馬仕,或者迷你獵豹和小愛(ài)馬仕之間創(chuàng)造出混合體。我們迫不及待地想看看最終的機(jī)器人會(huì)是什么樣子。
編輯:hfy
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29730瀏覽量
212824 -
驅(qū)動(dòng)模塊
+關(guān)注
關(guān)注
0文章
65瀏覽量
14452 -
愛(ài)馬仕
+關(guān)注
關(guān)注
0文章
3瀏覽量
1749
發(fā)布評(píng)論請(qǐng)先 登錄
輪式移動(dòng)機(jī)器人電機(jī)驅(qū)動(dòng)系統(tǒng)的研究與開(kāi)發(fā)
人形機(jī)器人敏捷開(kāi)發(fā)新路徑:RT-Thread以軟件底座破解復(fù)雜系統(tǒng)難題 | 新聞速遞

鴻道Intewell操作系統(tǒng):人形機(jī)器人底層操作系統(tǒng)
深開(kāi)鴻推出全國(guó)首個(gè)基于開(kāi)源鴻蒙的機(jī)器人操作系統(tǒng)
全國(guó)首個(gè)基于開(kāi)源鴻蒙的機(jī)器人操作系統(tǒng)M-Robots OS正式發(fā)布,中國(guó)機(jī)器人產(chǎn)業(yè)進(jìn)入“群體智能”新時(shí)代

鴻道AI機(jī)器人操作系統(tǒng)亮相中關(guān)村論壇

【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】1.初步理解具身智能
《具身智能機(jī)器人系統(tǒng)》第7-9章閱讀心得之具身智能機(jī)器人與大模型
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+數(shù)據(jù)在具身人工智能中的價(jià)值
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】+初品的體驗(yàn)
智能移動(dòng)機(jī)器人系統(tǒng)方案指南

智能移動(dòng)機(jī)器人

使用水星Mecury人形機(jī)器人搭建VR遙操作控制平臺(tái)!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論