 協作機器人當之無愧成為機器人館的明星
協作機器人當之無愧成為機器人館的明星

沒有力控參數的“協作機器人”
不足以稱“協作機器人”
引言——伴隨著2020年工博會的結束,協作機器人當之無愧的成為了機器人館的明星,不僅占據了展館的大部分顯要位置,連傳統的工業機器人廠商都紛紛效仿推出新款的協作機器人。
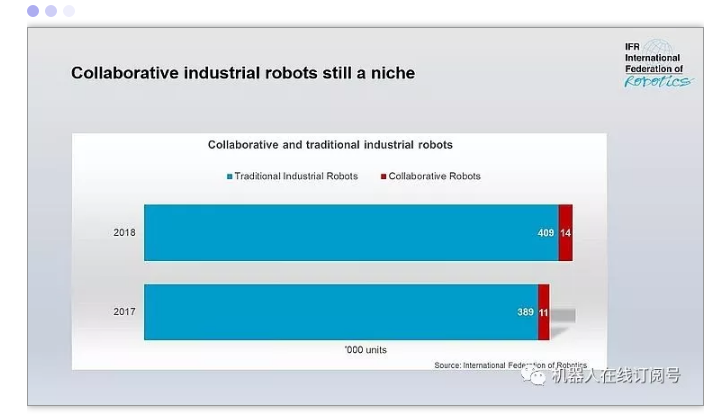
World Robotics于2019年分析了協作機器人(cobots)的市場,盡管協作機器人(cobots)引起了各大媒體的強烈關注,雖然其安裝的單位數量對比傳統機器人仍然非常低,僅占3.24%,不過從增長率看,協作機器人的浪潮已悄然開始,從17年到18年,其增長率高達23%,國內協作機器人在媒體端儼然成為制造業寵兒。
很多媒體喜歡用“彎道超車”這個詞,貌似國內在傳統機器人落后了就能憑借協作機器人打個翻身仗?中國龐大的機器人市場如果作為賽道,需要的是觀眾們理性科學的認知及核心競爭力產品的出現方能開啟賽跑模式。協作機器人本是工業機器人的一個細分產品,且其概念較模糊,應用場景語焉不詳,市場吹捧和資本青睞會將協作機器人帶向何處,對此作為機器人行業人的筆者深感焦慮。
協作機器人具有與人一起工作的屬性,從這個屬性出發我們大概能推演出協作機器人的三大特點:安全,輕量,人機友好,筆者對協作機器人最為擔心的是最關鍵且爭議最大的“安全”問題。
為了讓機器人更安全,協作機器人廠家通過不同的技術方式來檢測外部碰撞或規避與人接觸。
1,其中最典型的一種技術方式是通過檢測電流電壓的變化來判斷外部是否發生碰撞,這種方案的優點是結構簡單,對控制和硬件要求較低,而它的缺點則是碰撞敏感度低,在安全和柔性上仍存很大問題。因此,在實際生產使用中與人協作并能保證完全安全的概率幾乎為零。
這類協作機器人的應用場景絕大多數也是替代了原本小負載工業機器人的應用場景,本質上是行協作之名,做小六軸之事。
2,第二種是增加外部力傳感器,分末端增加六維力傳感器,每個關節均增加一維傳感器,底座增加傳感器三類,其中末端增加六維傳感器并不能保證在機器人本體處的安全(如三四軸夾到手)所以其并不具有協作屬性,因此將此排除在外。
底部增加傳感器的這種方式由于算法復雜,干擾多,在協作機器人中普及并不廣。最接近協作概念的應該是每個關節都有力矩傳感器并且其力控制或外部敏感度達到一定的指標。
以Franka為例,官方數據顯示其力分辨率<0.05N;力矩分辨率<0.02Nm;示教牽引力約2N;碰撞反應時間<2ms; 用這些力控參數反向來證明其人機交互的可靠性。
3,第三種是在機器人外圍增加區域光柵或,其他檢測設備,當人進入機器人工作區域時,機器人降速或停止,這種方案往往是的一種技術路線的彌補,本身與“協作”的定義背道而馳、不予討論。
但縱使Franka Emika可以官宣出其他協作機器人廠家諱莫如深的力控參數,是否就能證明他的機器人安全且協作的呢?
答案是否定的!
我們知道機器人本身是一個多軸串聯的移動機構,真正使用的時候還必須配套相應的末端執行工具,而末端工具是否安全才能決定機器人本體是否能發揮出協作性能。
有些協作機器人廠家在協作機器人末端增加氣動夾爪,真空吸盤,焊槍等執行工具,這無疑讓整個機器人系統的安全性消失殆盡,再去強調機器人的協作性無異于掩耳盜鈴。
為了解決這個問題Fanrka通過標配夾爪且將夾持力限制在140N以內方案來達到末端的安全性。但縱使這樣也很難保證其絕對的安全,在有些場景機器人需要抓取一些硬物,尖銳物,觸碰到人體某些敏感部位如眼球,太陽穴依然能造成很大的傷害。
通過以上的分析,協作的安全定義根本無法自圓其說,筆者認真查閱了協作機器人標準(ISO/TS 15066;2016)里面甚至列出了人體每個部位能承受的最大壓力,用以限制機器人性能,這無疑是一個畫地為牢,固步自封的可笑操作,同樣的規范,老年病人的生物承受限度是遠低于青壯人的,被機器人碰撞到的人體各部位的硬度和體重及約束條件也各有不同。如對一個有嚴重骨質松的老年人,目前iso建議的碰撞力將有可能產生骨折。所以世界上沒有任何設備能保證其絕對的安全!
機床需要人工上下料,也算是“協作”了,但他安全嗎?汽車算是最直接的人機交互設備,但他安全嗎?人拿著電動螺絲刀擰螺絲,螺絲刀安全嗎?所以機器人安全本身就是一個非常矛盾可笑的概念,據筆者的好友反饋歐洲已經不再提“協作機器人”這個概念,但是機器人的力控制確實是個機器人發展的方向這使得機器人多了一個感知維度,相機讓機器人有了眼睛,力控讓機器人有了觸覺。沒有力控制參數的機器人不足以稱“協作機器人“。因此規范力控參數,放棄“協作”概念,才是協作機器人發展的正解。
在2020工博會上Franka Emika的衛卜源先生重新定義并梳理了Franka Emika機器人的 技術優勢,市場策略,強化了力控技術參數在機器人上的重要意義。首次以“力控機器人”的概念強化了市場的認知。倡導大家丟棄夸大的說辭,專注科學的精度。
原文標題:Franka Emika 衛卜源:放棄“協作”概念,規范力控參數
文章出處:【微信公眾號:機器人在線訂閱號】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
機器人
+關注
關注
213文章
29667瀏覽量
212523 -
協作機器人
+關注
關注
2文章
514瀏覽量
30552
原文標題:Franka Emika 衛卜源:放棄“協作”概念,規范力控參數
文章出處:【微信號:im_robotic,微信公眾號:機器人在線訂閱號】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
華沿機器人:以協作機器人技術賦能汽車智能制造新時代

慧通測控的協作機器人有哪些測試項目?

工業機器人與協作機器人概念不同






 工商網監
工商網監
評論