") 如何實現(xiàn)毫米波雷達的模塊化?
如何實現(xiàn)毫米波雷達的模塊化?

德賽西威的模塊化毫米波雷達專利,通過對多個雷達模塊的發(fā)射線陣和接收線陣進行排布,使其進行物理級聯(lián),之后又采用FMCW調(diào)制信號校準,實現(xiàn)毫米波雷達的模塊化,進而使得高精度雷達的設(shè)計更加靈活,也更易于實現(xiàn)。
隨著汽車工業(yè)的飛速發(fā)展,越來越多的毫米波雷達國內(nèi)自主品牌開始發(fā)力,其中致力于成為未來出行變革創(chuàng)領(lǐng)者的德賽西威,其生產(chǎn)的毫米波雷達已在多款量產(chǎn)車型中搭載。
在毫米波汽車雷達設(shè)計中,多輸入多輸出(MIMO)技術(shù)正在廣泛應(yīng)用,使得接收端和發(fā)射端之間形成了虛擬通道,進一步在雷達通道數(shù)一定的情況下提高了雷達的角度分辨率,為車載高精度雷達的發(fā)展奠定了基礎(chǔ)。同時,為了增加雷達通道數(shù)本身,在單芯片集成多通道的基礎(chǔ)上可以對芯片進行級聯(lián)。但是在傳統(tǒng)的整體設(shè)計條件下,由于走線復(fù)雜,級聯(lián)芯片越多,芯片到天線之間的走線距離就越遠,在毫米波段引入很大的插入損耗,降低了系統(tǒng)的能量效率。
為此,德賽西威在2019年10月底就申請了一項名為“一種模塊化毫米波雷達”(申請?zhí)?201911033502.3)的發(fā)明專利,申請人為惠州市德賽西威汽車電子股份有限公司。
此專利提出了一種模塊化毫米波雷達,含有多個雷達模塊,而雷達模塊包括雷達芯片、以及連接在雷達芯片的接收線陣和發(fā)射線陣。多個雷達模塊進行模塊化級聯(lián)步驟如下圖1所示。
圖1 多雷達模塊級聯(lián)步驟
首先根據(jù)雷達模塊的接收線陣和發(fā)射線陣的排布,將多個雷達模塊進行物理級聯(lián)。
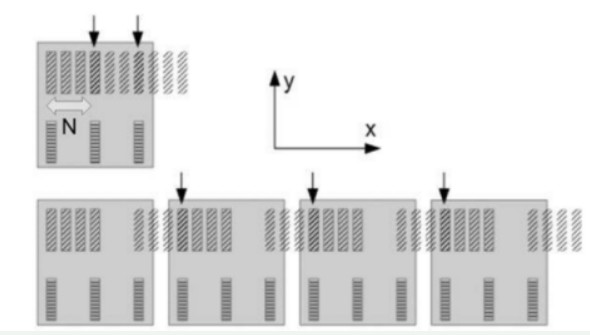
圖2 構(gòu)建MIMO模塊化雷達方式示意圖
接收線陣可采用等間距陣形式分布或者稀疏陣形式分布,假設(shè)接收線陣的總長度和發(fā)射天線的間距都為N,參見圖2。而且由圖可知,接收線陣和發(fā)射線矩陣分別包括4個接收天線(圖2斜紋)和3個發(fā)射天線(圖2橫紋)。在完成了模塊以后,模塊間的級聯(lián)可通過在基板上直接擺放實現(xiàn),并且雷達模塊大小應(yīng)該與接收天線或發(fā)射天線物理尺寸一致,使得每一個新添加的發(fā)射天線將對應(yīng)一個虛擬接收陣列,而且這種長度尺寸關(guān)系可以按照如圖的方法無限延展下去,通過使用多個雷達芯片進一步將虛擬陣擴展,以實現(xiàn)更大的虛擬陣列。
然后就是對一個所述雷達模塊進行模塊內(nèi)校準,且對完成物理級聯(lián)的多個所述雷達模塊進行模塊間校準。
在一個雷達模塊內(nèi),通過發(fā)射線陣的多個發(fā)射天線分時對已知目標發(fā)送信號,并對接收線陣的接收天線接收的相位進行計算,完成模塊內(nèi)校準。
而對完成物理級聯(lián)的多個雷達模塊進行模塊間校準則包括LO頻率同步校準和RF信道校準。對于L0信號,首先將LO信號耦合至雷達模塊的基板中,再通過傳輸線將同步LO信號輸入到不同雷達模塊的雷達芯片并且結(jié)合發(fā)射線陣發(fā)射的信號,以此判斷LO頻率是否同步。如果LO頻率不同步,則通過數(shù)字延長線對LO頻率進行時延調(diào)解。針對RF信道校準,首先校準雷達模塊的接收線陣和發(fā)射線陣,在多個雷達模塊物理排布后,由FMCW調(diào)制信號校準進行校準,從而實現(xiàn)多個雷達模塊的級聯(lián)。
綜上所述,德賽西威的此項專利,通過對多個雷達模塊的發(fā)射線陣和接收線陣進行排布,使其進行物理級聯(lián),在物理級聯(lián)完成之后,又采用FMCW調(diào)制信號校準,實現(xiàn)毫米波雷達的模塊化。
而通過模塊化的車載雷達,其構(gòu)建虛擬陣變得更加容易,只需要將模塊前后裝在基板上就可以進行模塊級聯(lián),德賽西威模塊化毫米波雷達讓高精度雷達設(shè)計更加靈活,也更加易于實現(xiàn)。
關(guān)于嘉德
深圳市嘉德知識產(chǎn)權(quán)服務(wù)有限公司由曾在華為等世界500強企業(yè)工作多年的知識產(chǎn)權(quán)專家、律師、專利代理人組成,熟悉中歐美知識產(chǎn)權(quán)法律理論和實務(wù),在全球知識產(chǎn)權(quán)申請、布局、訴訟、許可談判、交易、運營、標準專利協(xié)同創(chuàng)造、專利池建設(shè)、展會知識產(chǎn)權(quán)、跨境電商知識產(chǎn)權(quán)、知識產(chǎn)權(quán)海關(guān)保護等方面擁有豐富的經(jīng)驗。
責(zé)任編輯:tzh
-
芯片
+關(guān)注
關(guān)注
459文章
52494瀏覽量
440681 -
天線
+關(guān)注
關(guān)注
70文章
3281瀏覽量
142331 -
毫米波
+關(guān)注
關(guān)注
21文章
1973瀏覽量
66043
發(fā)布評論請先 登錄
ADAS和防撞系統(tǒng)中的毫米波雷達方案

毫米波雷達信號的傳輸特性
毫米波雷達的基頻和調(diào)制技術(shù) 毫米波雷達在機器人導(dǎo)航中的應(yīng)用
毫米波雷達與超聲波雷達的區(qū)別
毫米波雷達與激光雷達比較 毫米波雷達在自動駕駛中的作用
毫米波雷達工作原理 毫米波雷達應(yīng)用領(lǐng)域
康謀技術(shù) | 高效環(huán)境感知:毫米波雷達數(shù)據(jù)采集、可視化及存儲方案


毫米波雷達感應(yīng)Demo






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論