 如何使用MicroPython控制單片機
如何使用MicroPython控制單片機
1. 摘要
本文檔主要介紹,在python環境下,如何開發嵌入式應用程序,以STM32H43板卡為例介紹. 從系統環境搭建,到編譯,到用python實現硬件控制。可作為入門教程。
2. 準備工作
2.1 開發環境搭建
2.1.1 Win10自帶linux系統
開發環境可以自己使用虛擬機然后安裝ubuntu系統,而Win10系統自帶有linux系統,只需要使能就可以使用,比較方便,所以我們以win10自帶的linux子系統為例。
在控制面板中啟用linux子系統,點擊啟用或關閉Windows功能。
如下圖勾選適用于linux的windows子系統,然后重啟電腦
點擊立即重新啟動
重啟后進入windows 10 應用商店,搜索Ubuntu,可以選擇18.04或者20.02進行安裝
下載安裝完畢,點擊啟動
設置用戶名和密碼,
安裝的默認路徑是
C:Usershpp19AppDataLocalPackagesCanonicalGroupLimited.Ubuntu18.04onWindows_79rhkp1fndgscLocalState ootfshome
路徑不能修改,至此linux環境就好了,可以輸入一些常用命令看看,如ls,cp, rm等命令。
Win10地下安裝的linux子系統只支持命令行, 沒有自己用虛擬機安裝的功能全面,但是對于開發micropython 足夠。
2.1.2 虛擬機安裝
如果不想用windows10 安裝的,想自己搭建也是可以,需要安裝虛擬機和下載ubunut的iso鏡像文件,進行安裝,這種安裝網上很多,我們就不詳細列出了,推薦第一種安裝。
2.1.3 依賴軟件安裝
Git安裝,git用來獲取軟件包
使用克隆micropython的軟件包,也可以去官網自己下載,拷貝到linux環境的home目錄下。
使用git 克隆軟件包
如果網絡不好,要等一段時間,比較慢。也可以自己到官網下載,我已經下好,大家可以找我索取當前最新板micropython-1.13
http://www.micropython.org/download/
2.1.4 Micropython 目錄結構
目錄結構比較重要,只有清除目錄結構了,你才能移植到不同的板卡。
詳細的目錄結構介紹可以參考README.md
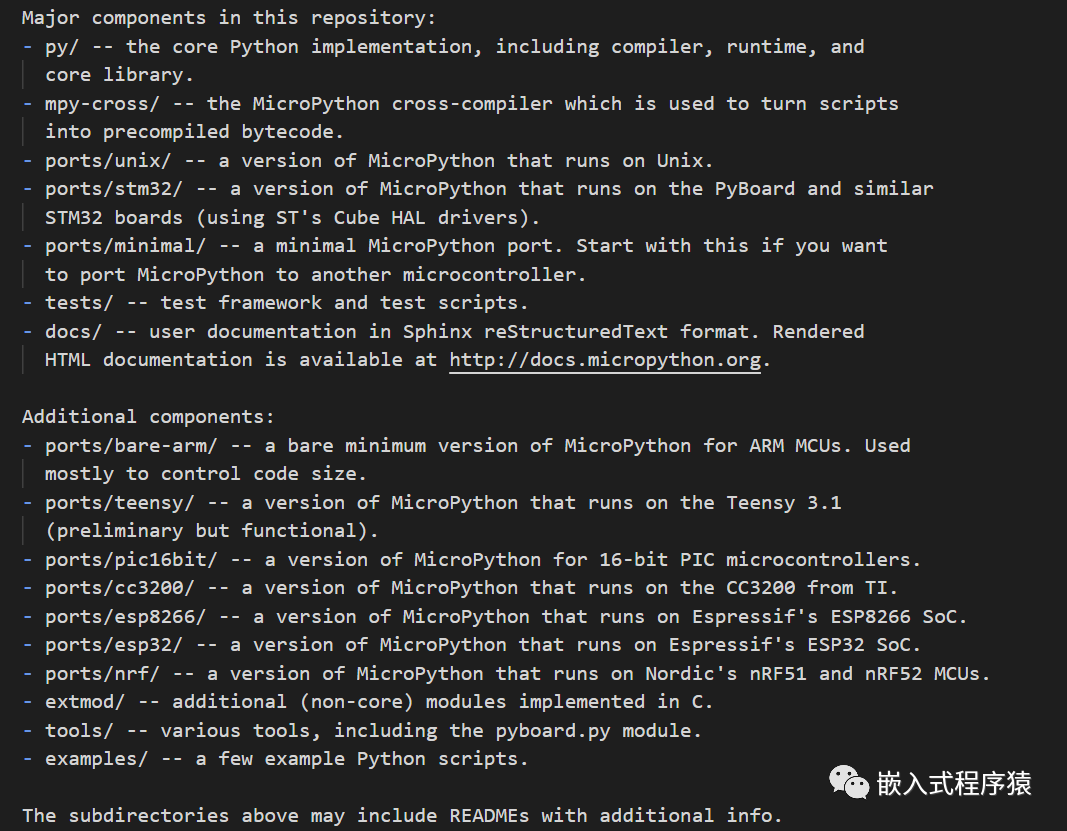
主要關注下目前micropython支持的ST開發板,和我們關系比較大的是H7系列,可以看到目前支持很多的ST芯片。
3. 交叉編譯工具鏈
在終端輸入sudo apt install gcc make 命令安裝 gcc, make
安裝完后可以查看下版本

輸入 sudo apt-get install gcc-arm-none-eabi 安裝針對ARM的編譯器
如果你的交叉工具鏈安裝下載比較慢的話,請按以下步驟修改,因為linux自帶的軟件源地址都是國外的,國內更新下載安裝的話會比較慢,需要將列表更新為國內

將打開的文件內容全部刪除掉,替換為以下鏡像源
deb http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe multiverse
deb http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-security main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-updates main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-proposed main restricted universe multiverse
deb-src http://mirrors.aliyun.com/ubuntu/ focal-backports main restricted universe multiverse
修改完軟件源后,更新軟件列表和軟件:
sudo apt update
sudo apt upgrade
如果對vim編輯器命令不熟悉,可以自己百度,或者直接在以下目錄
C:Usershpp19AppDataLocalPackagesCanonicalGroupLimited.Ubuntu20.04onWindows_79rhkp1fndgscLocalState ootfsetcapt 下將sources.list文件替換為以下阿里云鏡像源,這樣速度會很快。
編譯mpy-cross, mpy-cross是一個micropython的輔助工具,在編譯過程中會用到,在micropython的源碼根目錄中輸入命令make -C mpy-cross
至此交叉編譯工具鏈就安裝完畢,可以編譯STM32的程序了。
4. 編譯程序
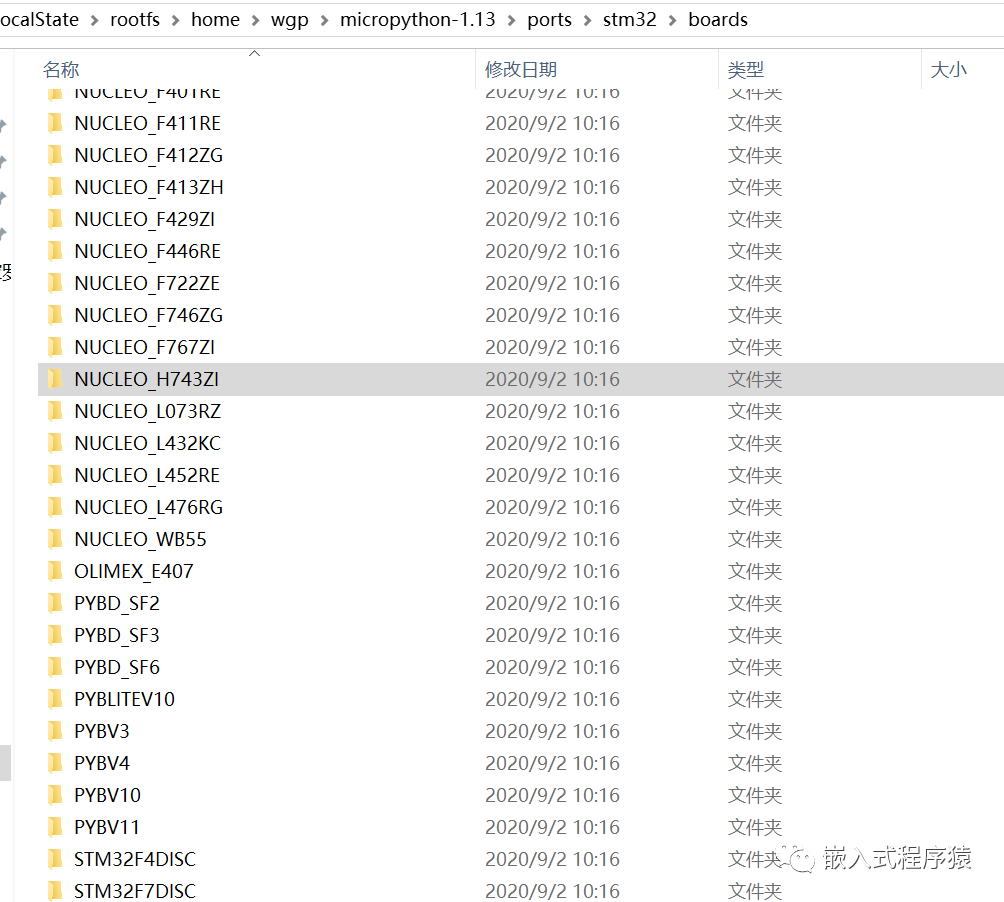
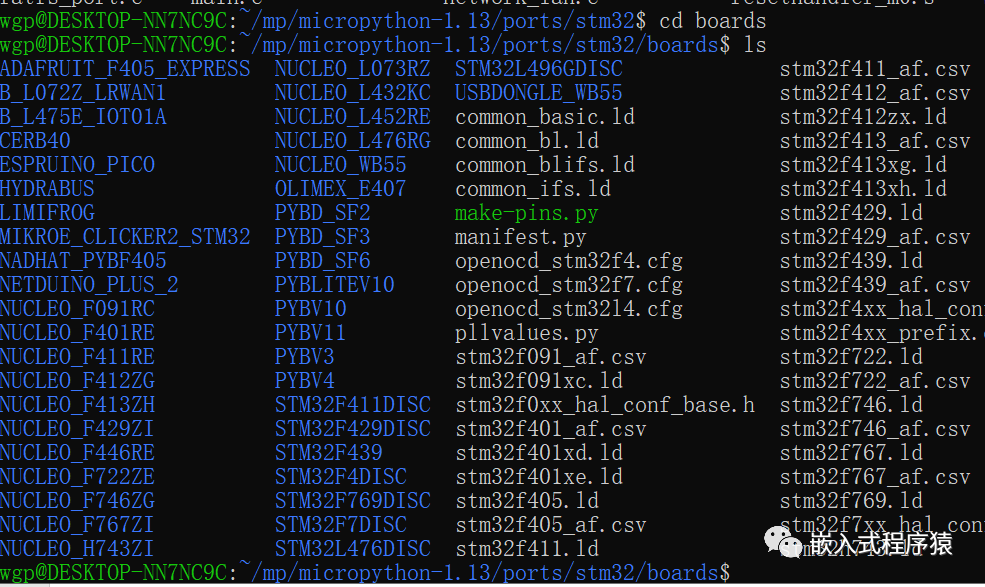
在源碼根目錄下輸入命令make -C ports/stm32 如果不指定BOARD,則默認編譯的是ports/stm32下的PYBV10板子,而我們需要的是能在H743上跑,所以需要裁剪移植一個對H743的板子,查看下可以看到micropython目前支持的STM32板卡有F091, F401,F429,F446,F746,H743等,
復制NUCLEO_H743ZI命名為BODEBOARD
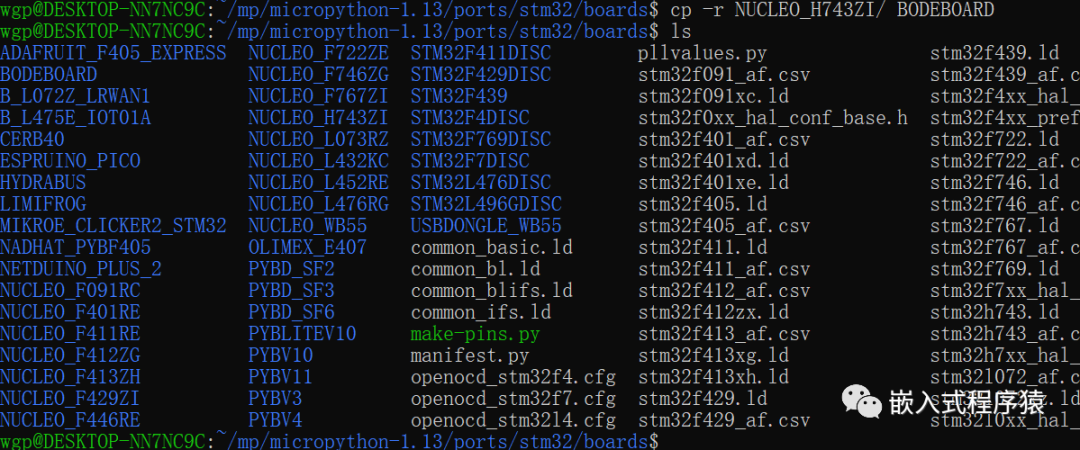
輸入命令ls查看下已經有BODEBOARD文件夾和文件,進入查看下
主要有5個文件,而我們就需要修改這里面的文件
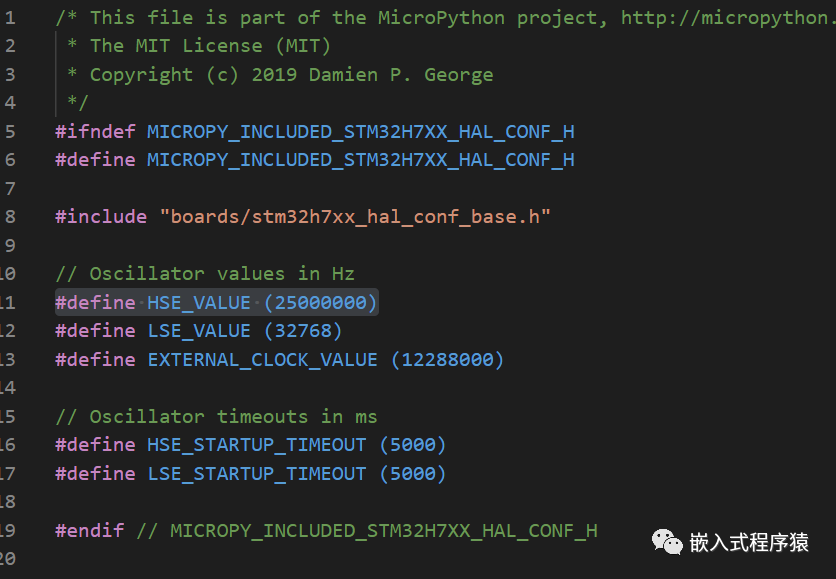
首先修改時鐘為25000000,主要是修改stm32h7xx_hal_conf.h文件
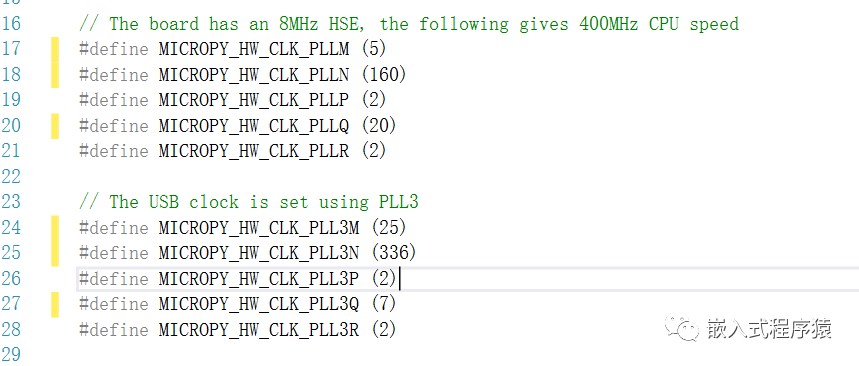
修改mpconfigboard.h
將時鐘修改為如下配置,可以復制我們之前IAR工程下的時鐘配置。
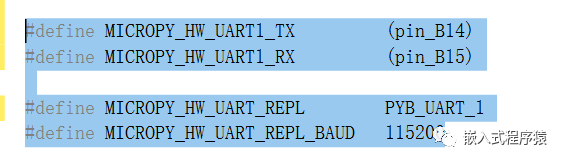
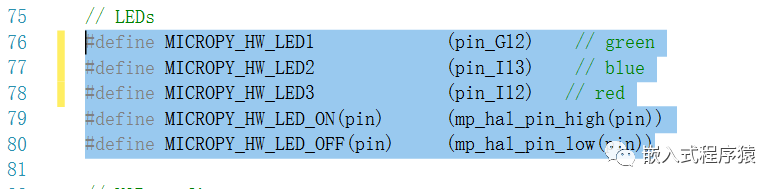
修改其他管腳,這一節我們只以修改三個LED和UART1等管腳為例,在文檔的下一個版本更新中,會更新所有用到的硬件管腳,還是在這個文件中繼續修改對應的硬件管腳
保存退出
修改pins.csv文件
添加LED和UART1的管腳
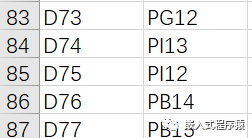
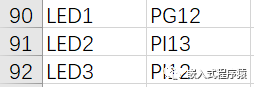
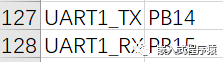
保存退出。
因為我們是參照的NUCLEO_H743ZI,所以mpconfigboard.mk文件不用修改。至此修改完畢,可以編譯,在micropython根目錄下輸入命令 make -C ports/stm32 BOARD=BODEBOARD
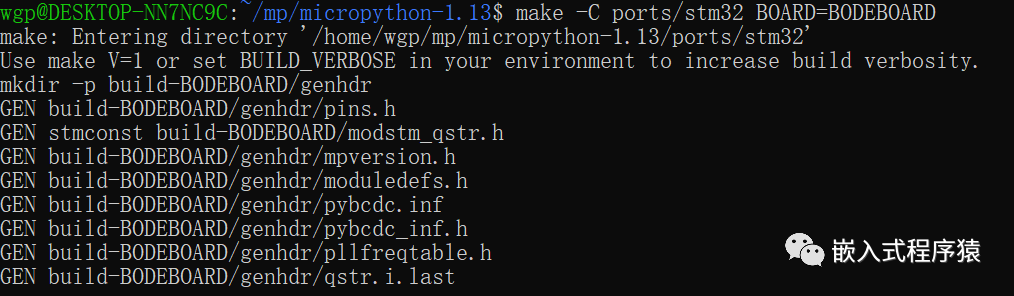
等待編譯完成。
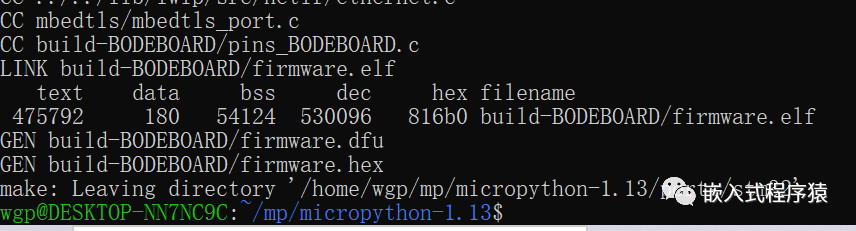
可以看到生成了.hex和.dfu固件,任選一種下載入H743板子,這樣板卡里就有了python解析器,可以識別python語言

編譯好的固件怎么樣復制到windows主機呢,當然你可以直接去生成的目錄底下拷貝,在win10 的linux子系統中默認已經將windows分區掛載好了,我們可以在/mnt目錄下看到
這樣我們就可以直接使用命令cp拷貝到windows了,當然如果你不習慣命令行操作,可以安裝midinight commander 軟件,可以方便的管理文件,輸入命令sudo apt install mc 進行安裝,安裝完后,輸入mc可以直接打開軟件。
不管用那種方法,將Hex文件下載到硬件板卡,下載完畢后,給板子重新上電,可以看到出現一個PYBFLASH類似U盤的盤符,打開里面有boot.py
main.py 等四個文件,我們最后的應用程序直接寫在main.py就可以運行了。
5. 測試
我們先來演示使用putty來控制板子上的LED燈,打開putty,配置波特率和串口號,
導入LED庫,就可以控制LED了
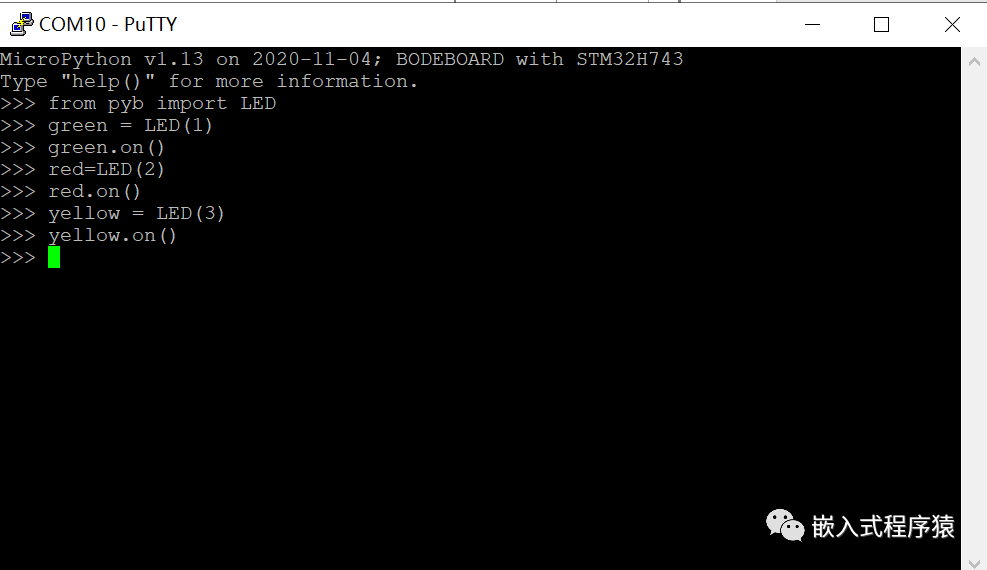
可以觀察H743的板子三個LED燈依次點亮,通過Putty可以控制硬件就完成了,那么如何讓板子上電就三個LED燈點亮,而不需要通過Putty控制呢。?
這就要編輯我們前面提到的main.py文件,使用任何文本編輯器打開,寫入python代碼,保存退出,就可以運行了。
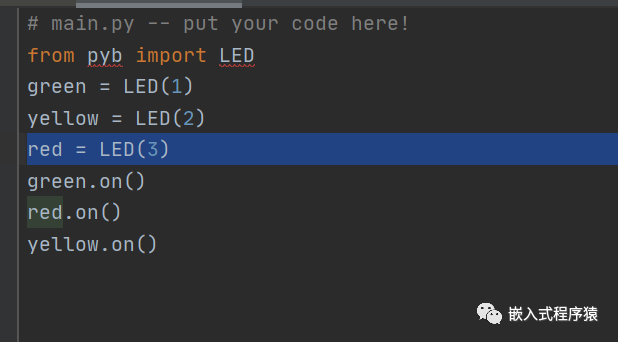
通過以上代碼就實現了LED的點亮控制,實現用python控制單片機。至此就可以用python編寫很多好玩的東西在單片機上跑了。
6. 參考文檔
| 序號 | 文獻 |
| 1 | www.micropython.org |
責任編輯:xj
原文標題:嘗嘗MicroPython控制單片機
文章出處:【微信公眾號:嵌入式ARM】歡迎添加關注!文章轉載請注明出處。
-
單片機
+關注
關注
6065文章
44946瀏覽量
648234 -
STM32
+關注
關注
2291文章
11019瀏覽量
363014 -
Micropython
+關注
關注
0文章
68瀏覽量
5192
原文標題:嘗嘗MicroPython控制單片機
文章出處:【微信號:gh_c472c2199c88,微信公眾號:嵌入式微處理器】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
單片機和伺服有什么區別
單片機科普總結,建議收藏!

什么是單片機的ADC接口
基于單片機中藥存放環境監測系統的實現

MCU與單片機的區別
單片機編程語言有哪些選擇

電子產品方案開發公司常用的15個單片機經典電路分享!
單片機加wifi模塊可以做什么
stm32單片機用什么軟件編程
單片機燒錄程序用什么軟件
基于STM32單片機的智能窗簾控制系統設計

基于STM32單片機的智能冰箱控制系統設計






 工商網監
工商網監
評論