") 深度相機的應(yīng)用及結(jié)構(gòu)光的攝像方案
深度相機的應(yīng)用及結(jié)構(gòu)光的攝像方案
上一期小編給大家介紹了TOF 與雙目結(jié)構(gòu)光的對比,那在深度相機的應(yīng)用方案種還有結(jié)構(gòu)光的攝像方案。今天小編就跟大家來聊一聊結(jié)構(gòu)光,順便也捋一捋這三者的對比。
結(jié)構(gòu)光
結(jié)構(gòu)光技術(shù)就是使用提前設(shè)計好的具有特殊結(jié)構(gòu)的圖案(比如離散光斑、條紋光、編碼結(jié)構(gòu)光等),然后將圖案投影到三維空間物體表面上,使用另外一個相機觀察在三維物理表面成像的畸變情況。如果結(jié)構(gòu)光圖案投影在該物體表面是一個平面,那么觀察到的成像中結(jié)構(gòu)光的圖案就和投影的圖案類似,沒有變形,只是根據(jù)距離遠(yuǎn)近產(chǎn)生一定的尺度變化。但是,如果物體表面不是平面,那么觀察到的結(jié)構(gòu)光圖案就會因為物體表面不同的幾何形狀而產(chǎn)生不同的扭曲變形,而且根據(jù)距離的不同而不同,根據(jù)已知的結(jié)構(gòu)光圖案及觀察到的變形,就能根據(jù)算法計算被測物的三維形狀及深度信息。
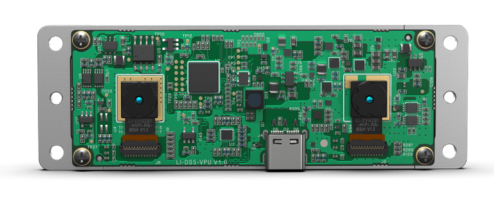
結(jié)構(gòu)光3D成像技術(shù)主要由4大部分組成:
1)不可見光紅外線(IR)發(fā)射模組:用于發(fā)射經(jīng)過特殊調(diào)制的不可見紅外光至拍攝物體。
2)不可見光紅外線(IR)接收模組:接收由被拍攝物體反射回來的不可見紅外光,通過計算獲取被拍攝物體的空間信息。
3)鏡頭模組:采用普通鏡頭模組,用于2D彩色圖片拍攝。
4)圖像處理芯片:將普通鏡頭模組拍攝的2D彩色圖片和IR接收模組獲取的3D信息集合,經(jīng)算法處理得當(dāng)具備3D信息的彩色圖片。
雙目視覺 Vs 結(jié)構(gòu)光 Vs TOF
下表是雙目立體視覺、結(jié)構(gòu)光、TOF三種可以測量深度(距離)的技術(shù)方案綜合比較:
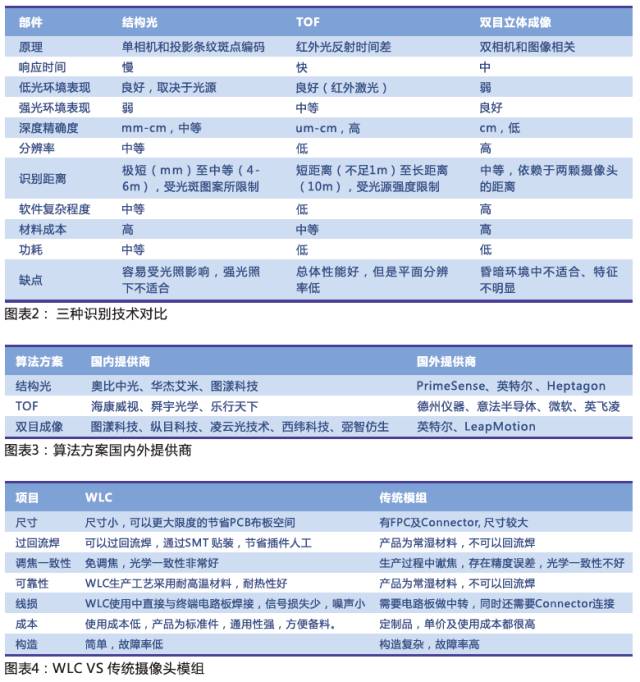
(點擊看大圖)
從上述的對比分析來看,TOF方案具有響應(yīng)速度快,深度信息精度高,識別距離范圍大,不易受環(huán)境光線干擾等優(yōu)勢。因此想要在移動端直接實現(xiàn)深度的測量,最有競爭力的就是TOF方案了。
典型手機
典型代表手機:聯(lián)想Phab 2。
目前可以買到的具備直接深度測量的智能手機只有Google和聯(lián)想合作的聯(lián)想Phab 2,2016年11月推出,是全球首款支持Google Project Tango技術(shù)的手機,其深度相機采用TOF技術(shù)方案,由PMD公司提供。
華碩也宣布將在2017年會推出帶深度相機的手機Zenfone AR,號稱是全球首款同時支持Google Project Tango(AR)和Daydream(VR)的手機。
iPhone8也將會使用深度相機,果然收購PrimeSense公司是有目的的,我們拭目以待。
深度相機應(yīng)用
深度相機的應(yīng)用范圍非常廣泛:比如未來幾年將會迅速商業(yè)化的手勢識,以及活體人臉識別、空間測距、三維重建、AR(增強現(xiàn)實)等領(lǐng)域。
1、手勢識別。
TOF深度相機可以將人臉、身體、手臂、手指從背景中分離,并且這種分割置信度較高,不受自然光變化的影響,同時能夠?qū)崟r性處理,所以這將在智能交互領(lǐng)域大有用武之地。預(yù)計最近幾年會迅速進(jìn)入消費級電子產(chǎn)品中。
2、真實的AR游戲體驗。
如下圖是Phab 2的AR游戲展示。由于在二維圖像中融合了實時的深度信息,所以AR游戲的體驗比較真實。比如虛擬出來的一只貓,通過實時的空間深度感知,它可以“感受”到空間的相對位置關(guān)系,當(dāng)它走到桌子邊緣的時候,會很自然地跳到地面上,這在之前的AR游戲中是難以實現(xiàn)的。
3、三維空間測量。
由于能夠?qū)崟r獲得深度信息,所以實現(xiàn)三維空間測量也是順其自然的。比如在室內(nèi)裝修領(lǐng)域,可以方便的將各種虛擬的家具以真實的尺寸擺放到現(xiàn)實環(huán)境中,用戶拿著手機就可以體驗家居放在室內(nèi)的360°真實效果,這無疑將是一個令人激動的應(yīng)用場景。
4、三維掃描/重建。
可以用于三維物體和k建模和機器人視覺導(dǎo)航和定位。比如你看到一座非常喜歡的雕塑,就可以利用手機上的彩色相機+深度相機對它掃描一周,結(jié)合相應(yīng)的算法就可以生成該雕塑的三維模型數(shù)據(jù),利用三維打印機就可以方便的打印出一個三維的雕塑復(fù)制品出來。
5、更廣泛的其他應(yīng)用。
融入了深度信息的三維影像可以用于活體人臉識別,避免傳統(tǒng)二維人臉識別的安全隱患;可以更加方便進(jìn)行人體三維測量,從而推動虛擬在線試衣行業(yè)的發(fā)展等。
隨著深度測量技術(shù)的發(fā)展,必然還有出現(xiàn)更多有趣的應(yīng)用場景。
原文標(biāo)題:結(jié)構(gòu)光3D成像原理及應(yīng)用
文章出處:【微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
責(zé)任編輯:haq
-
3D
+關(guān)注
關(guān)注
9文章
2936瀏覽量
109045 -
Ar
+關(guān)注
關(guān)注
25文章
5134瀏覽量
171366 -
圖像處理
+關(guān)注
關(guān)注
27文章
1318瀏覽量
57434
原文標(biāo)題:結(jié)構(gòu)光3D成像原理及應(yīng)用
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
可智能深度學(xué)習(xí)的AI攝像機模組方案
DLP3310可以外部觸發(fā)兩個相機采集圖像嗎?
使用DLP4710-LC做結(jié)構(gòu)光實驗,請問哪里可以下載到對應(yīng)光機的SDK?
用DLP3010evm-lc的trigger out2接工業(yè)相機的光耦輸入,無法觸發(fā)相機拍照怎么解決?
如何用PC來控制DLP2000EVM來投影結(jié)構(gòu)光圖案?
超越視界 全面感知,光鑒科技Nebula 400深度相機正式發(fā)布

VirtualLab Fusion應(yīng)用:用于光導(dǎo)耦合的傾斜光柵的分析
VirtualLab Fusion應(yīng)用:如何建立一個真實光柵結(jié)構(gòu)的光導(dǎo)
深度剖析:光譜攝像集成智能云臺驅(qū)動方案技術(shù)
立體視覺新手必看:英特爾? 實感? D421深度相機模組
友思特方案 多相機的完美閉環(huán):proFRAME車載全景環(huán)視相機數(shù)采方案

奧比中光推出2.0版大模型機械臂
深度解析高速光耦與普通光耦的性能差異

浪潮云洲發(fā)布云洲燭龍雙目結(jié)構(gòu)光3D相機
奧比中光攜多款3D相機深度參與國內(nèi)3D視覺最高規(guī)格會議






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論