 基于單片機和虛擬現實技術實現全功能模擬雷達訓練系統的設計
基于單片機和虛擬現實技術實現全功能模擬雷達訓練系統的設計

航空兵在夜間或復雜氣象條件下實施轟炸或投布魚、水雷,在這種條件下,光學瞄準具的使用有一定的局限性。而轟炸瞄準雷達則可以彌補光學瞄準具的這一局限性,它受氣象條件限制小,可以利用目標反射的電磁波在遠距離觀察、發現和識別目標,并對目標實施轟炸或投射魚雷。在航行中,它可以提供必要的領航諸元,還可觀察山峰和雷雨云,防止飛機撞山和進入雷雨區Ⅲ。由于轟炸瞄準雷達的開關、旋鈕眾多,操作步驟復雜,因此在雷達教學和訓練中需要較多的雷達操作實習。傳統的實習方法是在地面或空中操作實裝雷達,其缺點是保障困難且會減少實裝雷達的使用壽命,另外在地面操作實裝雷達也探測不到大范圍的地物回波,無法培養飛行員發現、瞄準目標的能力。因此,研制一種能在地面進行全功能模擬訓練的轟炸瞄準雷達訓練系統是十分必要的。
1 主要功能
模擬訓練系統主要完成以下功能:
(1)雷達操作程序的練習,如通電前檢查程序,雷達開、關機程序,雷達信號檢查程序,雷達影像調整程序,對目標的瞄準程序等。
(2)模擬某一區域內的地面和海面目標雷達影像,用于搜索地面和水面目標及瞄準訓練。
(3)利用雷達畫面確定飛機的領航要素,供領航員領航。如測量飛機地速、偏流、真高、地標相對方位角、地標斜距以及確定本機位置等。
(4)教控臺同步顯示各雷達模擬器的畫面及操作,以利于教員對學員的操作進行*價。
(5)管理學員的雷達操作成績,如學員信息的錄入,學員成績的*定、檢索、打印等。
2 硬件設計
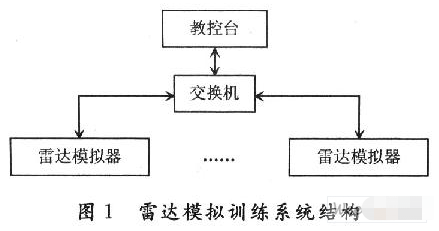
模擬系統由教控臺、多部雷達模擬器組成。教控臺和雷達模擬器之間由網絡連接通信,結構如圖1所示。
2.1 教控臺
教控臺由控制臺和一臺計算機組成,用來導演戰場想定背景、模擬雷達載機的運動、監控學員對雷達的操作及對訓練操作進行*估。它通過網絡與雷達計算機進行通信,向雷達計算機實時傳送戰場態勢和載機參數,雷達計算機則向教控臺傳送雷達狀態和雷達顯示畫面。
2.2 雷達模擬器
為了保證模擬器操作界面的逼真性,雷達模擬器采用半實物仿真的方式。由于雷達顯示器是最主要的顯示操作設備,且該型雷達顯示器形狀不規則難以仿真制作,因此雷達顯示器采用實裝設備。其余控制設備本著外觀一致、控制關系一致、接口一致的原則進行設計制作。由一臺工控計算機作為仿真主機完成雷達模型建立和信號處理仿真,采集各元器件的開關量和模擬量,仿照實裝的邏輯關系,產生各種控制信號,控制面板上的各種指示燈、指示表和雷達顯示器上的視頻信號的顯示。
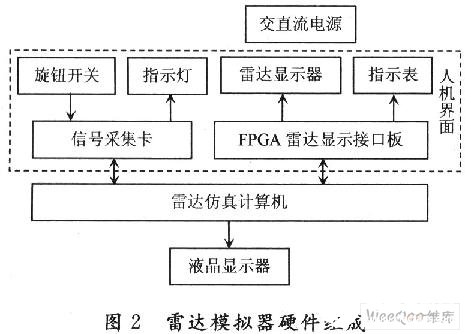
模擬器組成如圖2所示,雷達仿真計算機通過信號采集卡采集各元器件的開關量和模擬量,產生各種控制信號,控制面板上的各種指示燈;根據教控臺送來的戰場環境和載機參數完成雷達模型建立和信號處理仿真;模擬產生雷達回波和雷達的狀態并通過RS 232串口傳送至雷達顯示接口板。
雷達顯示接口板主要完成以下功能:
(1)根據雷達狀態產生重復頻率為l 250 Hz或535 Hz的各種波形驅動顯示器進行掃描顯示,這些波形主要包括掃描鋸齒波、消隱方波、定時脈沖等。
(2)處理雷達仿真計算機送來的雷達回波,經D/A轉換形成視頻信號后輸入到雷達顯示器。
(3)產生距離刻度脈沖、測距脈沖、主瞄脈沖、預瞄脈沖等送人雷達顯示器顯示成各類標志。其中定時脈沖、掃描鋸齒波、消隱方波、各類脈沖和雷達回波這些信號要在時序上嚴格一致。
(4)根據雷達狀態驅動氣壓表、雷達信號檢查表、天線俯仰指示表指示相應的位置。
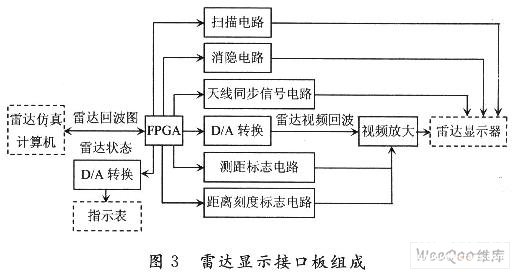
以FPGA為中心的雷達顯示接口板是系統設計的重點和難點之一,組成如圖3所示。雷達仿真主機與FPGA之間定時通信,將主機模擬的雷達狀態及地形目標傳遞給FPGA。FPGA根據雷達狀態產生觸發脈沖到掃描電路產生鋸齒波,鋸齒波加入到雷達顯示器的偏轉線圈從而產生掃描線。FPGA根據雷達狀態控制天線同步信號電路產生不同速度的天線轉動信號,天線轉動信號加入到顯示器的天線同步接收器中驅動顯示器進行圓周掃描或方型掃描。在觸發脈沖的觸發下,FP-GA把從雷達仿真主機接收到的當前方位下的地物回波信號經D/A轉換電路轉換成雷達視頻信號,再經放大后加入到雷達顯示器的柵極,從而顯示出地面目標回波圖像。FPGA還負責產生雷達顯示的其他信號,包括距離標志、瞄準標志、噪聲、干擾等。此部分的設計要求實時性和同步性較高,雷達顯示接口板的運行必須在時序上,特別是外部輸入/輸出工作時序上與真實雷達工作特性相一致,以實現與真實雷達顯示器的數據交換。
3 系統軟件設計
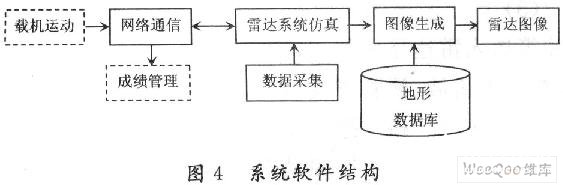
轟炸瞄準雷達訓練系統軟件運行于Windows 2000操作平臺下,結構如圖4所示。系統軟件通過對采集到的操作員的操作、載機的飛行參數和雷達系統狀態等信息進行處理,利用虛擬現實技術實時地模擬生成逼真的雷達畫面。同時將雷達視頻回波由雷達顯示接口板傳送給真實雷達顯示器進行顯示。
主要模塊的功能如下:
(1)數據采集模塊:主要用來采集雷達各個開關、旋鈕的狀態。
(2)通信模塊:負責教控臺與雷達模擬器、雷達模擬器與FPGA間交換數據。
(3)載機運動仿真模塊:模擬生成載機運動的航跡。根據飛行器質心運動模型模擬生成載機的飛行航線,根據飛行器的姿態角變化模型模擬生成載機的姿態。
(4)雷達系統仿真模塊:用計算機建模仿真雷達的功能狀態。
(5)地形數據庫模塊:利用MultiGen Creat建模工具建立地物場景的三維模型,如河流、山脈、樹林、城鎮、鐵路等,之后用MultiGen的TMM工具為三維模型加表面反射和紋理,最終生成地形紋理配置文件,在地形紋理配置文件中包括了所指定的地形紋理區域的大小和散射截面積。
(6)雷達圖像生成模塊:根據地形數據庫的地景數據,利用Vega軟件的RadarWorks模塊生成雷達地物回波圖像。Vega的Radarworks模塊根據材質數據庫、地形紋理配置文件及雷達系統參數、載機狀態信息等實時的判斷各個單元的有效反射面積并計算雷達反射強度,從而提供了基于真實地形的機載雷達的逼真的仿真圖像。
(7)成績管理模塊:*估、管理學員模擬訓練成績。以上模塊中,載機運動仿真模塊和成績管理模塊由教控臺計算機運行,教控臺計算機和雷達仿真計算機都安裝有網絡通信模塊,其余模塊由雷達仿真計算機運行。
系統軟件工作流程如下:載機運動仿真模塊根據仿真模型和教員的指令生成載機飛行航線,模擬載機按設定的航線和高度進行飛行,實時地將載機運動參數通過網絡傳送給雷達仿真模塊。同時傳送給雷達仿真模塊的數據還有由數據采集模塊采集到的雷達開關、旋鈕狀態。雷達仿真模塊根據雷達當前的開關、旋鈕位置確定雷達的工作狀態,如距離量程、掃描方式等。雷達仿真模塊根據掃描方式確定天線轉速,根據載機位置、飛行高度和雷達天線俯仰角度等參數計算雷達的波束擦地角,進而確定當前雷達的距離探測范圍。雷達仿真模塊將計算到的波束寬度、方位掃描范圍、天線俯仰角、距離分辨率、掃描線掃描的增量、掃描速度和載機飛行參數傳遞給圖像生成模塊。圖像生成模塊利用Vega的Ra-darWorks模塊,通過設置以上雷達參數并根據載機的當前位置調用地形數據庫中的數據,生成仿真的雷達圖像。最后由通信模塊將雷達視頻回波經雷達顯示接口板傳送給雷達顯示器顯示。
4 結 語
設計的訓練系統采用半實物仿真,單片機控制、虛擬現實技術模擬轟炸瞄準雷達。半實物仿真由于采用真實雷達顯示器和與實裝雷達一致的操作面板,因此模擬效果比虛擬仿真更真實,尤其適合針對飛行人員的操作訓練。通過虛擬現實技術可逼真地模擬飛行中的雷達回波圖像,使得雷達畫面更加真實。系統在檢測練習者的各種操作時,能將雷達畫面顯示在教控臺顯示器上,可實時、全程監控訓練過程,便于整體教學。
責任編輯:gt
-
單片機
+關注
關注
6067文章
44992瀏覽量
650605 -
雷達
+關注
關注
50文章
3119瀏覽量
120128 -
模擬器
+關注
關注
2文章
894瀏覽量
44415
發布評論請先 登錄






 工商網監
工商網監
評論