 剖析PWM調速對直流電機運行特性的影響研究
剖析PWM調速對直流電機運行特性的影響研究
0 引言
PWM即脈沖寬度調制,PWM調速就是在固定的頻率下,通過控制電力半導體器件在一周期內的開通與關斷時間,調整直流電機兩端的電壓大小,從而調節電機轉速[1]。PWM調速具有控制方便、調速平滑、響應速度快等優點,因此在直流電機調速領域中被廣泛采用[2-3]。PWM調速主要靠電壓的調整,而電壓的變化對直流電機的轉矩、機械特性也會造成影響。為研究這種影響的變化規律,設計直流電機驅動電路進行實驗,通過調節PWM波的占空比和頻率來進行對比試驗,然后對實驗數據分析計算,得到PWM調速對電機運行特性的影響。
1 直流電機運行特性
直流電機的運行特性主要包括轉速特性、轉矩特性、機械特性(轉速-轉矩特性)及效率特性。本文主要討論前三種特性。
1.1 轉速特性
轉速特性是指在額定電壓和額定電流的情況下,電機的轉速n與電樞電流Ia之間的關系。
式中,Ce為電動勢常數;
為每一磁極總磁通量;U為電樞端電壓;Ia為電樞電流;Ra為電樞電路總電阻。
1.2 轉矩特性
轉矩特性是指在額定電壓和額定電流下,電機的轉矩Te與電樞電流Ia之間的關系。
式中,
為轉矩常數。
1.3 機械特性
機械特性作為電機一個重要的特性,是指電機在額定電壓和額定電流情況下,轉速與轉矩之間的關系。

式中,
為理想空載轉速,
為機械特性斜率。
2 PWM調速電路設計方案
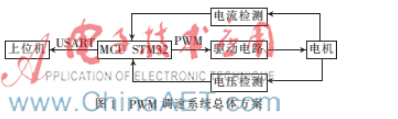
根據直流電機的運行特性公式(1)~(3)可知,直流電機的運行特性與U和Ia均有關。為準確分析PWM波對運行特性的影響,直流電機驅動電路需采集電機的電流值和電機兩端的電壓值。總體設計框圖如圖1所示[4]。
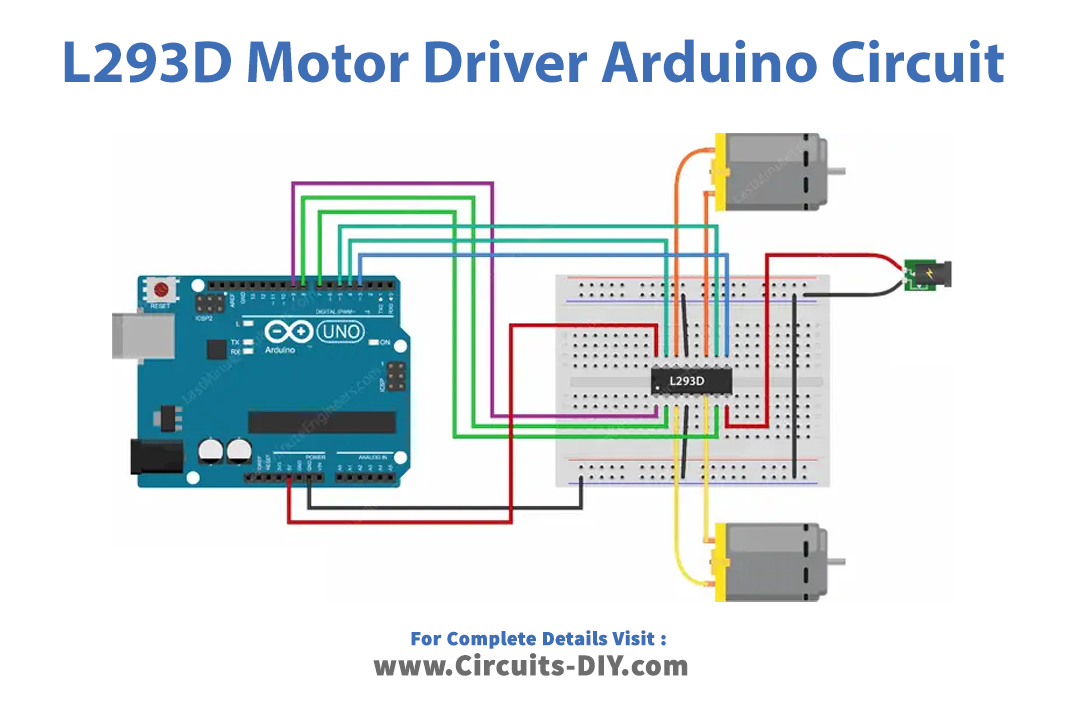
2.1 驅動電路
驅動電路由IR2110驅動芯片和場效應管搭建的H橋電路組成。IR2110是高電壓、高功率MOSFET和IGBT驅動芯片,具有獨立的高端和低端輸出通道,其高壓側可承受500 V~600 V的電壓[5]。圖2為H橋驅動電路,MOSFET選用IRF540,自舉電容為0.47
,自舉二極管為1N5819。電機的控制信號為PWM1、PWM2,分別接STM32的PB12、PB13。其中PWM1為正轉控制信號,PWM2為反轉控制信號。PWM1和PWM2同時輸入時為能耗制動。
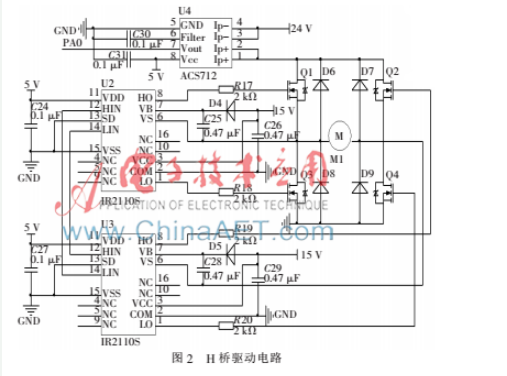
2.2 電流、電壓檢測電路
驅動電路電流檢測選用線性電流傳感器ACS712,該器件輸出電壓與檢測的電流有很好的線性[6],將該芯片串接在H橋與電源之間,如圖2所示。系統中ACS712輸出與STM32的PA0相連。電壓檢測選用電阻分壓的方式,將電機兩端電壓接10
和1電阻接地,用STM32的PA1端口采集兩電阻之間的電壓。
2.3 STM32及上位機
STM32用于輸出PWM波以及電機的電流、電壓采集與轉換,并將數據通過串口輸出。測試中上位機為PC,選用串口調試助手作為上位機軟件。
3 數據采集
PWM波主要參數為占空比和頻率,為確保結果準確可靠,分別進行恒定頻率不同占空比和恒定占空比不同頻率實驗。實驗選用正科ZYTD-60SRZ的24 V/36 W永磁式電機,其空載轉速2 000 r/min,空載電流為0.23 A。
3.1 恒定頻率不同占空比
實驗中PWM輸出的頻率不變,占空比逐漸增加,從上位機得到電機的電流值和電壓值。為排除誤差引入的干擾,得到準確的數據,選擇3個不同頻率進行實驗。圖3為不同頻率下電機兩端的電壓變化曲線,表1為不同頻率下電機的電流值。
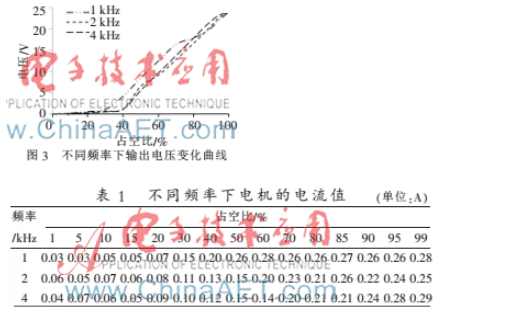
由實驗可知,在頻率恒定,占空比達到一定值時,電機兩端電流才會受到占空比的影響。且電機兩端的電壓與占空比呈線性關系變化。電機電流隨占空比增加而增大,低占空比時增加緩慢,占空比達到一定值后電流快速增加,之后趨于穩定。
3.2 恒定占空比不同頻率
為使數據準確可靠,選擇占空比分別為10%、30%、50%、70%、90%、99%進行實驗。實驗過程中,占空比不變,頻率由低到高逐漸增加,得到電機的電流值和電壓值,繪制圖表如下。圖4為恒定占空比下電機兩端的電壓變化曲線,表2為恒定占空比下電機的電流值。
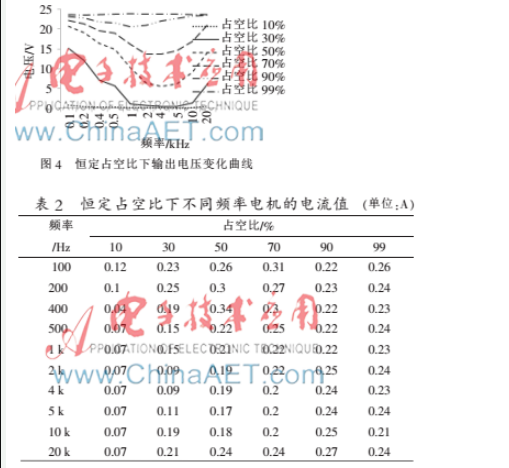
由上述實驗可知,在低占空比的情況下,頻率對電機兩端電壓影響較大,而高占空比時,影響則小得多。但是低頻時,電機運行會產生抖動,且噪聲較大;高頻時則運行平穩,且噪聲小。該實驗中,電機在1 kHz時運行平穩,噪聲小。電機的電流與電壓的變化規律幾乎一致,且在同一頻率下的電流變化正好印證了恒定頻率不同占空比的實驗。
4 驗證實驗
為了驗證實驗結果的正確性,便于對電機運行特性進行分析。選用強磁24 V直流電機驗證。其結果如表3、表4。
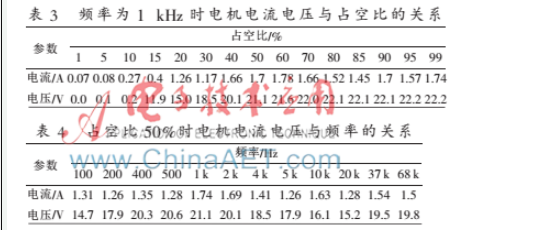
由表3、表4的數據可得到與上述實驗相同的結果,因此,可得到實驗結果如下:
(1)占空比達到一定值,電機兩端電壓才會增加,且與占空比近似線性;
(2)電流在低占空比時電流較小,達到一定值時電流迅速增大,接近額定電流時,趨于穩定;
(3)電機在低頻運行時,會有抖動且噪聲大,高頻時運行平穩、噪聲小;
(4)頻率對電機兩端電壓的影響與占空比有關,占空比高則影響小,占空比低則影響大;
(5)電機的電流變化與電壓的變化趨勢大體一致。
5 運行特性分析
由實驗可知,用PWM波控制電機時,占空比為影響電壓、電流的主要因素,因此需要討論占空比對運行特性的影響。該24 V/36 W直流電機的額定空載轉速n′0= 2 000 r/min,可得:
由
可得:
在對電機運行特性進行分析時,可認為
恒定不變,則
也為定值。
將數據進行運算得到該直流電機運行特性隨占空比的變化曲線,如圖5~7所示。
(1)轉速特性
根據轉速公式(1),在低占空比時,由于電壓和電流變化較小,電機轉速很小,當占空比超過一定值時,電壓和電流均升高,在這一階段轉速開始上升,在占空比較高時,電機的電流和電壓接近額定值,這時轉速緩慢上升,直到達到最大值。
(2)轉矩特性
根據轉矩公式(2),轉矩主要由電機電流決定,因此轉矩的變化趨勢與電機電流相似,在低占空比時,轉矩很小,隨著占空比增加轉矩也增加,在高占空比時,轉矩逐漸趨于穩定。
(3)機械特性
由公式(3)可知,電機的機械特性與轉速和轉矩有關,計算時設空載轉速為定值,因此機械特性主要決定因素為轉矩。在低占空比時,轉矩很小,機械特性最好,隨著占空比增加轉矩增加,機械特性逐步減小,在高占空比時,轉矩逐漸趨于穩定,機械特性也趨于穩定。
6 結論
通過搭建直流電機驅動電路,分析PWM波的占空比、頻率對直流電機兩端電壓和電流的影響,得出相關數據并進行分析得到一般性結論,然后驗證結論的正確性。根據實驗結論和直流電機運行特性的相關計算公式,分析電壓、電流的變化對運行特性的影響,從而得到脈寬調制對直流電機運行特性的影響。
(1)PWM波的占空比對運行特性的影響:電機轉速與轉矩變化趨勢相似,在低占空比時,轉速和轉矩很小,當占空比超過一定值時,轉速和轉矩增加,在高占空比時,轉矩逐漸趨于穩定;而機械特性在低占空比時最好,隨著占空比增加機械特性逐步降低。
(2)PWM波的頻率對運行特性的影響:隨著頻率增加電機運行的抖動和噪聲減小,但綜合硬件設計,使用PWM控制電機時,應選取合適的頻率。
參考文獻
[1] 何存富,周龍,宋國榮,等.基于DSP的直流電機驅動控制電路設計[J].測控技術,2007(1):64-67.
[2] 解恩,王璞.一種新穎的直流電機PWM調制方式[J].電機與控制應用,2012(11):29-32.
[3] 焦玉朋.基于51單片機的PWM直流電機調速系統[D].呼和浩特:內蒙古大學,2013.
[4] 楊學存,楊戰社,孔令紅.基于ARM的嵌入式直流電機PWM調速系統設計[J].煤礦機械,2012(4):255-257.
[5] 伍洲,方彥軍.IR2110在電機驅動器設計中的應用[J].儀表技術與傳感器,2008(11):88-90.
[6] 董建懷.電流傳感器ACS712的原理與應用[J].中國科技信息,2010(5):92-93,96.
編輯:jq
-
直流電機
+關注
關注
36文章
1710瀏覽量
70411 -
PWM
+關注
關注
114文章
5198瀏覽量
214884 -
驅動電路
+關注
關注
153文章
1533瀏覽量
108748
發布評論請先 登錄
相關推薦
直流電機的應用原理及控制原理是什么?
直流電機有哪些型號?如何分類的?
直流電機是什么?具有什么特點?
直流電機是什么 直流電機介紹及其工作原理
pwm可以直接驅動直流電機嗎
ESP32-D0WDQ6的PWM能驅動幾路直流電機?
其利天下技術·直流電機的三種調速方法·無刷電機驅動方案
直流電機有哪3種調速方法?各有什么優缺點?
實現更高效運行,直流電機對驅動技術有何要求
無刷直流電機(BLDC)運轉工作原理圖





 工商網監
工商網監
評論