") 基于微波雷達(dá)和激光技術(shù)實現(xiàn)高速視頻超速監(jiān)控系統(tǒng)的設(shè)計
基于微波雷達(dá)和激光技術(shù)實現(xiàn)高速視頻超速監(jiān)控系統(tǒng)的設(shè)計

作者:孫華燕,李迎春,唐黎明
介紹了一種高速公路視頻超速監(jiān)控系統(tǒng)的硬件構(gòu)成、軟件功能和動目標(biāo)檢測、動目標(biāo)跟蹤與速度測量、車牌自動定位以及車牌字符自動識別等關(guān)鍵技術(shù)的實現(xiàn)方法。該系統(tǒng)可廣泛應(yīng)用于高速公路管理、卡口管理、巡邏執(zhí)勤、逃逸車輛抓捕等場合,具有很好的應(yīng)用前景。
隨著國民經(jīng)濟(jì)的迅猛發(fā)展,我國的高速公路建立發(fā)生了翻天覆地的變化。公路上行駛的車輛越來越多、速度也越來越快,與車輛交通有關(guān)的案件也呈不斷上升勢頭,交通肈事逃逸等案件時有發(fā)生。如何運(yùn)用科學(xué)的手段幫助公安部門有效控制高速公路上超速違章現(xiàn)象、抓捕逃逸車輛,已成為公安交通部門急待解決的問題。目前能完成超速監(jiān)控功能的成熟系統(tǒng)有:基于微波雷達(dá)和基于激光的超速監(jiān)控系統(tǒng)。它在車輛經(jīng)過時,利用反射波的頻率變化監(jiān)控在車輛信息,不能提供超速汽車類型、車牌號碼等全面的交通信息,無法及時進(jìn)行違章處理及抓捕逃逸車輛。
本高速公路視頻超速監(jiān)控系統(tǒng)利用視頻圖像處理技術(shù),對高速公路車道上的汽車進(jìn)行非接觸式監(jiān)控,獲得超速車輛車速、車牌號碼、違章照片等運(yùn)行狀態(tài)信息,可應(yīng)用于高速公路管理、逃逸車輛抓捕等場合。
1 系統(tǒng)結(jié)構(gòu)
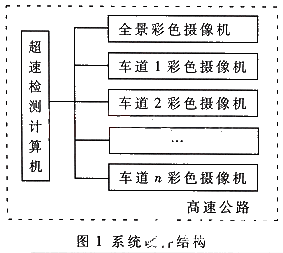
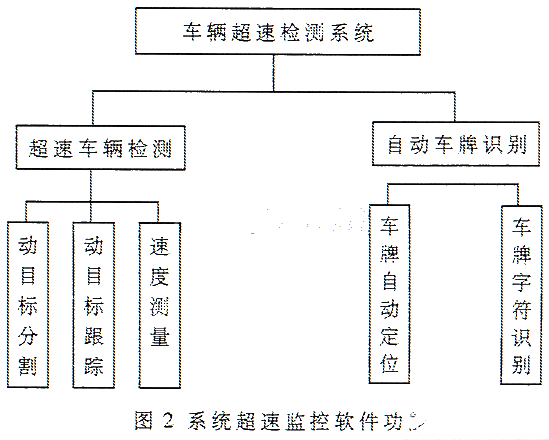
高速公路視頻超速監(jiān)控系統(tǒng)的硬件結(jié)構(gòu)如圖1所示。它由超速監(jiān)控攝像頭和現(xiàn)場計算機(jī)等部分組成。在高速公路上安裝監(jiān)控攝像頭(一個彩色全景攝像機(jī)、n個車道級彩色攝像機(jī))及超速監(jiān)控計算機(jī),24小時實時監(jiān)控高速公路上所有通過車輛的車速信息。系統(tǒng)軟件包含超速車輛檢測和自動車牌識別兩部門。超速監(jiān)控計算機(jī)通過實時視頻采集卡首先采集高速公路的全景圖像,并利用全景圖像進(jìn)行超速車輛檢測;如檢測到違章車輛,啟動相應(yīng)車道的攝像機(jī)工作,采集近景圖像并用利近景圖像自動車牌識別,其識別結(jié)果可分車牌號碼字符、車牌號碼照片、汽車違章照片分別修配存到超速違章車輛數(shù)據(jù)庫,以供事后處理;如需要,還可通過無線、有線或光纖通信網(wǎng)自動向高速公路收費(fèi)站的違章處理服務(wù)器傳送違章車輛的車牌號碼、違章照片信息,以實時進(jìn)行違章處理。軟件系統(tǒng)功能框圖如圖2所示。
2 軟件功能實現(xiàn)
2.1 動目標(biāo)分割
理想情況下,從視頻圖像進(jìn)行超速車輛檢測時,可以直接用幀間差的方法比較前后兩幀圖像,去除靜止的區(qū)域,保留運(yùn)動區(qū)域,判定視場中是否存在著汽車,判斷汽車的運(yùn)動軌跡及速度。但是在實際的成像過程中,場景中的諸多因素,包括照明情況、場景中物體的幾體形狀和物理性質(zhì)(特別是表面的反射性質(zhì))、成像系統(tǒng)的特性以及光源、物休和成像系統(tǒng)之間的空間關(guān)系等,都被綜合為單一圖像中像素點的灰度值;由于空間的強(qiáng)輻射、光照的變化和傳感器本身的光學(xué)特性等原因,會在每一幀圖像中產(chǎn)生較強(qiáng)的干擾和噪聲。因此,在進(jìn)行圖像檢查前對圖像進(jìn)行基于平均法去噪的初始背景獲得和基于Kalman濾波的實時背景更新等預(yù)處理;然后采用提取函數(shù)分割目標(biāo)與背景。
設(shè)Ck={ck(x,y)}代表當(dāng)前圖像,Rk={rk(x,y)}代表參考圖像,其中(x,y)為像素點的坐標(biāo),ck(x,y)≥0,rk(x,y)≤255,則提取函數(shù)Ek=(ck(x,y),rk(x,y))定義如下:

容易知道,式中0≤Ek(ck(x,y),rk(x,y)) ≤1。
用提取函數(shù)對在公路上采集到的實際運(yùn)動車輛的圖像做動目標(biāo)檢測,其實驗結(jié)構(gòu)如圖3所示。
2.2 動目標(biāo)跟蹤及速度測量
在目標(biāo)跟蹤的同時,需要判斷計算目標(biāo)的運(yùn)動速度,所以采用特征點匹配的方法進(jìn)行動目標(biāo)跟蹤,以便利用特征點的視差計算車速。其要點是:在一幀圖像的活動目標(biāo)窗口中選擇一組具有不變性質(zhì)的特征點,與下一幀圖像中的同類特征點作匹配,從而求得視差。這就是特征點匹配的方法。
采用Moravac算子作為點特征提取算子。它基于一個理想的特征點,在其四周所有方向上灰度具有很大的方差。
特征點提取的步驟為:首先,在5х5的窗口計算
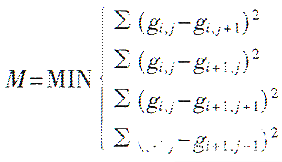
式中,i=n-2,。..,n+2;j=m-2,。..,m+2;m,n為窗口中心像元的行、列序列,gij為(i,j)處圖像的灰度值。
然后,確定備選特征點,若像元的有利值M大于經(jīng)驗閾值,則該像元為備選特征點;否則,該像元不是特征點。
最后,用抑制局部非最大M值的方法,確定特征點。檢驗每個備選特征點的M值是否為一定大小(5х5,7х7,9х9)窗口內(nèi)的最大值,如果在窗口內(nèi)有幾個備選特征點,則取M值最大的像元作為特征點,其余均去掉。
為保證匹配的正確率,采用協(xié)方差最大與差的絕對值之和最小作為雙重判據(jù),決定匹配點的取舒暢,以增強(qiáng)匹配結(jié)果的可靠性。
找到匹配點后,利用兩者視差和事前標(biāo)定過的視場內(nèi)圖像最小分辨率所代的最小距離以及圖像采集的間隔時間,就可計算出目標(biāo)速度,根據(jù)此值預(yù)測目標(biāo)新位置并判斷是否超速。
2.3 車牌自動定位
車牌自動定位是車牌照自動識別的第一步,正確而又可靠地檢測出車牌區(qū)域是保證車牌識別率的關(guān)鍵。目前存在許多車牌自動定位算法,如Hough變換以檢測直線來提取車牌邊界區(qū)域、使用灰度分割及區(qū)域生長進(jìn)行區(qū)域分割、使用紋理特征分析技術(shù)等。但實際使用時,單用一種方法難以達(dá)到實用要求。本文采用的方法是:首先用Prewitt算子提取車輛的二值邊緣圖像,然后用數(shù)學(xué)形態(tài)學(xué)、顏色搜索相結(jié)合的方法,進(jìn)行汽車牌照定位。圖4為汽車牌照定位實驗結(jié)果示意圖。
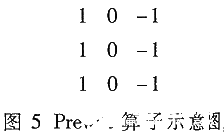
Prewitt算子定義如圖5所示。由于汽車圖像具體特殊的橫向紋理特性,而牌照字符最具有縱向紋理特性,因此利用Prewitt邊緣檢測算子的方向性,通過增強(qiáng)圖像的縱向邊緣可將牌照圖像與汽車背景圖像分離。
對Prwitt算子檢測獲得的二值邊緣圖像進(jìn)一步采用數(shù)學(xué)形態(tài)學(xué)方法中的膨脹技術(shù)生成連通區(qū)域圖像。其中結(jié)構(gòu)元素S的選擇,對于侯選牌照區(qū)域的形成與牌照區(qū)域提取至關(guān)重要,因膨脹后得到的牌照區(qū)域極易出現(xiàn)與其他紋理粘連的現(xiàn)象,從而給進(jìn)一步牌照區(qū)域提取帶來困難,因此采用的結(jié)構(gòu)元素S為具有水平方向膨脹能力的水平線段,膨脹后能得到多個侯選牌照區(qū)域,如圖4(c)所示。
針對上述方法得到的可能為車牌的區(qū)域,通過大小、長寬比例、侯選車牌字符邊緣密度等幾何特征分析侯選牌照區(qū),再充分利用車牌號碼區(qū)的顏色特征,通過搜索號碼區(qū)底板顏色塊和號碼顏色的方法,進(jìn)一步從圖像中刪除虛假牌照區(qū),得到可能為車牌的區(qū)域。
2.4 字符自動識別
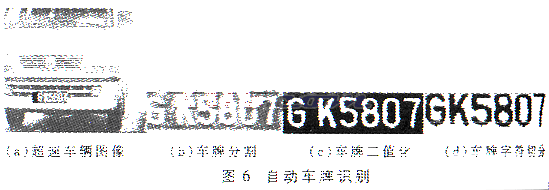
針對分割完成后的牌照圖像進(jìn)行字符自動識別,需首先對車牌圖像二值化、字符切分和規(guī)范化、字符特征提取,然后根據(jù)字符特征庫,完成車牌字符自動識別。圖6為字符自動識別的效果示意圖。
圖像二值化的方法很多,針對車牌圖像,二值化的基本要求是使二值化后的圖形能忠實地再現(xiàn)原文字。具體為:筆劃中不出現(xiàn)空白以及二值化后的筆劃基本保持原來字符的特征。二值化的關(guān)鍵在于閾值T的選擇,采用判斷分析二值化法。從圖像灰度值的直方圖中把灰度值的集中用閾值分為兩類,然后根據(jù)兩個類的類間方差和類內(nèi)方差的最大來確定分割閾值。車牌圖像二值化后,根據(jù)牌照中字符所占像素比便要小于背景所占像素比例,將車牌圖像統(tǒng)一變?yōu)榘椎缀谧帧?/p>
為把字符分為單個字符,以送入識別系統(tǒng)識別,在字符圖像二值化后,進(jìn)行字符切分。利用車牌字符固定的高寬比和間距作出先驗知識,在分割前先估算出字符寬度、間距,并從圖像數(shù)值方向的投影直方圖定出字符的開始位置,切分全部字符;然后將文字外接邊框按比例線性放大或縮小為規(guī)定的32х64大小。
車牌字符識別系統(tǒng)的關(guān)鍵在于字符特征的提取,也就是如何選取既容易提取又能為識別系統(tǒng)提供盡可能高的模式鑒別能力、同時還要盡量少的特征維數(shù)的特征向量,它應(yīng)該是最佳的樣本特征屬性的度量。由于車牌字符共有七個字符:第一位是漢字,通常代表車輛所屬省份,或是軍種、警別等有特定含義的字符簡稱;第二位為大寫的英文字符,一個圓點間隔后的第三個字符是英文字母或是數(shù)字,其余的四位為數(shù)字。車牌字符識別與一般文字識別在于它的字符數(shù)有限,漢字共約50多個,大寫英文字母26個,數(shù)字10個。為實時識別考慮,特征向量的維數(shù)可適當(dāng)選擇較低的維數(shù)。
系統(tǒng)采用投影-Fourier變換特征、網(wǎng)格特征和輪廓特片組成字符特征向量,與模擬中的向量進(jìn)行特征匹配。特征匹配選用最小距離匹配法。經(jīng)大量圖像實驗,有較高的識別率。
3 系統(tǒng)特點
高速公路視頻超速監(jiān)控系統(tǒng)用利視頻圖像處理技術(shù),可對高速公路車道上的汽車進(jìn)行非接觸監(jiān)控,獲得車速、車牌號碼、違章照片等運(yùn)行狀態(tài)信息,自動車牌識別速度快、準(zhǔn)確率高,為實時違章處理提供了可能。該系統(tǒng)通用性強(qiáng)、開放性強(qiáng)、擴(kuò)展性強(qiáng),可應(yīng)用于高速公路管理、卡口管理、巡邏執(zhí)勤、逃逸車輛抓捕等場合。
責(zé)任編輯:gt
-
激光
+關(guān)注
關(guān)注
20文章
3469瀏覽量
67283 -
監(jiān)控系統(tǒng)
+關(guān)注
關(guān)注
21文章
4078瀏覽量
182660 -
雷達(dá)
+關(guān)注
關(guān)注
50文章
3122瀏覽量
120157
發(fā)布評論請先 登錄
視頻監(jiān)控系統(tǒng)的發(fā)展及在高速公路管理中的應(yīng)用
視頻監(jiān)控在交通技術(shù)發(fā)展的應(yīng)用
【TL6748 DSP申請】基于DSP的雷達(dá)測速監(jiān)控系統(tǒng)
24GHz微波雷達(dá)FMCW測距系統(tǒng)設(shè)計概述
激光雷達(dá)分類以及應(yīng)用
激光雷達(dá)在無人駕駛技術(shù)中的應(yīng)用解析
從光電技術(shù)角度解析自動駕駛激光雷達(dá)
最佳防護(hù)——激光雷達(dá)與安防監(jiān)控解決方案
激光雷達(dá)知多少:從技術(shù)上講講未來前景
基于ARM核心板AM335x設(shè)計高速公路廣域雷達(dá)測速解決方案
微波雷達(dá)模組,雷達(dá)傳感器技術(shù)發(fā)展,在物聯(lián)網(wǎng)領(lǐng)域的智能化應(yīng)用
微波雷達(dá)傳感器模塊,智能衛(wèi)生間技術(shù)應(yīng)用,人體存在感應(yīng)雷達(dá)
TOF高速單線激光雷達(dá)相關(guān)資料分享
高速公路視頻超速臨控系統(tǒng)的實現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論