") 簡述ARM微處理器的隧道照明智能控制器
簡述ARM微處理器的隧道照明智能控制器

引 言
隧道是高速公路的重要組成部分,隧道照明系統(tǒng)是車輛能夠安全地進入、通過和離開隧道區(qū)域必不可少的基本保證。目前長隧道的照明分為入口段、過渡段、基本段、出口段,每段的燈具按功能又分為應(yīng)急燈、全日燈和加強燈三種。應(yīng)急燈除在停電時用作應(yīng)急照明外還兼作全日照明,全日燈24小時不間斷工作,加強燈根據(jù)洞口不同的亮度來開啟。
隧道內(nèi)不同區(qū)域的亮度要求各不相同,它們和洞外亮度、交通流量、洞內(nèi)廢氣的多少、行車速度、燈具的養(yǎng)護周期等諸多因素有關(guān),甚至與路面的材料和洞壁的裝修材料有關(guān)。這些燈的控制目前基本上是靠開關(guān)照明回路來進行控制的。一般隧道都有七八個照明控制回路,建設(shè)投資大,施工難度高,隧道開通后管理者僅能在有限的回路里進行控制,很難兼顧到運營成本和隧道安全。
我們采用Philips公司(編者注:現(xiàn)更名為NXP公司)的基于ARM7 TDMI-S 內(nèi)核的微控制器LPC2119設(shè)計實現(xiàn)智能照明控制器,應(yīng)用在高速公路隧道照明CAN網(wǎng)絡(luò)中,較好地解決了隧道照明初期投資、運營成本和隧道安全之間的矛盾,收到了很好的經(jīng)濟效益和社會效益。
隧道照明系統(tǒng)CAN 網(wǎng)絡(luò)的構(gòu)成
CAN(控制器局域網(wǎng))是當今國際上應(yīng)用最廣泛的現(xiàn)場總線之一。CAN總線最初是由德國Bosch公司為汽車的檢測、控制系統(tǒng)而設(shè)計的。由于CAN總線具有獨特的設(shè)計思想、良好的功能特性和極高的可靠性,現(xiàn)場抗干擾能力強,已由國際標準組織ISO制訂了CAN總線的國際標準。
CAN協(xié)議是建立在國際標準組織ISO的開放系統(tǒng)互連參考模型OSI基礎(chǔ)上,主要工作在物理層、數(shù)據(jù)鏈路層和應(yīng)用層。用戶可在其基礎(chǔ)上根據(jù)實際需要開發(fā)自己的應(yīng)用層通信協(xié)議。CAN總線信號的傳輸可采用雙絞線、同軸電纜或光纖,最高通信速率可達1Mbps,數(shù)據(jù)傳輸在5Kbps 時,傳輸距離可達到10Km。一個CAN網(wǎng)段上的網(wǎng)絡(luò)節(jié)點可達110個,還可通過CAN網(wǎng)關(guān)/網(wǎng)橋延伸網(wǎng)段或和其他各種網(wǎng)絡(luò)互連互通。
CAN總線的這些特點使得其很適宜應(yīng)用在條件苛刻的高速公路隧道監(jiān)控系統(tǒng)或照明控制系統(tǒng)中。高速公路隧道照明控制系統(tǒng)CAN網(wǎng)絡(luò)主要由上位機、智能照明控制器、CAN網(wǎng)關(guān)/網(wǎng)橋等構(gòu)成(圖1)。
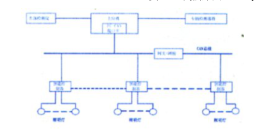
圖1 隧道照明控制系統(tǒng)CAN網(wǎng)絡(luò)構(gòu)成
上位機為PC機,內(nèi)插PC-CAN 接口卡,網(wǎng)絡(luò)拓撲采用總線結(jié)構(gòu),傳輸介質(zhì)采用雙絞線,為提高系統(tǒng)的抗干擾能力,在傳輸介質(zhì)和智能控制器之間采取了光電隔離。上位機并與隧道車輛檢測器群和光強檢測儀相連,配以我們開發(fā)的相應(yīng)軟件,對整個隧道的照明系統(tǒng)進行智能控制。
軟件的控制策略如下:在沒有車輛進入隧道時,根據(jù)光強檢測儀所檢測到的洞內(nèi)外光強差值,在隧道內(nèi)只開啟相應(yīng)的基本照明,當車輛檢測器檢測到車輛將進入隧道時,開啟隧道洞口的加強照明,當車輛進入隧道后,則將車輛前面一段相應(yīng)距離的加強照明開啟,一旦后面無車輛跟進,則將汽車身后的加強照明關(guān)閉。
同時利用光強儀還可判斷晴天、陰天、白天、晚上而開啟或關(guān)閉相應(yīng)的照明。可對單個的照明進行單控也可對區(qū)域照明進行群控。控制策略隨時可根據(jù)實際情況進行修正。這樣節(jié)約了大量的電能,有效的降低了運營成本。
智能照明控制器硬件設(shè)計
圖1是本智能控制器的總體設(shè)計框圖,主要由CPU模塊、電源模塊、通信模塊、光強檢測模塊、溫度檢測模塊、電流檢測模塊、開關(guān)控制模塊等組成。通信模塊將所有的控制器連接成一個完整的網(wǎng)絡(luò),便于值班員在監(jiān)控室對整個照明系統(tǒng)進行遠程控制,光強、溫度、電流檢測則是通過對這幾個參數(shù)的檢測來判斷設(shè)備的工作情況,開關(guān)控制模塊則是通過光電耦合、大功率可控硅開關(guān)進行控制的。
CPU 模塊
本智能控制器的核心采用了Philips公司的LPC2119微處理器,其采用ARM公司 ARM7TDMI-S 內(nèi)核,基于RISC精簡指令集的微處理器,具有32位總線寬度,內(nèi)置16KB的SRAM,128 KB Flash 存儲器。通過片內(nèi)PLL對片外晶振的倍頻,可實現(xiàn)最大為60MHz 的 CPU 操作頻率。
同時通過片內(nèi)Boot裝載程序可實現(xiàn)ISP在系統(tǒng)編程和IAP在應(yīng)用編程功能。由于LPC2119 較小的64引腳封裝、極低的功耗、多個32 位定時器、4 路10位ADC、2路CAN、8路10位ADC、以及多達9 個外部中斷使它們能很好的滿足系統(tǒng)的設(shè)計需要。系統(tǒng)硬件電路如圖2所示。
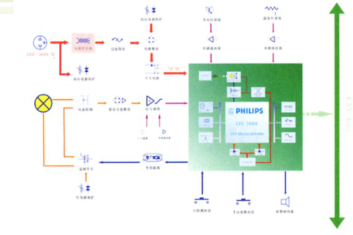
圖2 智能照明控制器框圖
電源模塊
LPC2119 為雙電源,CPU 操作電壓范圍:1.65~1.95 V(1.8 V± 0.15 V),I/O 操作電壓范圍:3.0~3.6 V(3.3 V± 10%),可承受5V 電壓,而溫度傳感器和光電傳感器及光耦隔離器均需5V直流電源驅(qū)動,故在設(shè)計電源模塊時必須提供5V、3.3V和1.8V的直流電源。在電源電路里加入了整流橋和穩(wěn)壓模塊,并采用電源隔離器B0505S將輸入和輸出電源相隔離,以屏蔽電源噪聲的影響。
通信模塊
高速公路中長隧道一般都在1至2公里左右,特長隧道甚至達到十幾公里。隧道燈的數(shù)量也從數(shù)百盞至數(shù)千盞不等。加上隧道內(nèi)環(huán)境條件惡劣,而RS-485通信存在抗干擾能力差,誤碼率高,無糾錯重發(fā)機制,通信距離短,不方便擴展等缺點,因此這里采用RS485通信網(wǎng)絡(luò)并不合適。LPC2119內(nèi)部集成了2個CAN控制器,這給我們采用CAN網(wǎng)絡(luò)提供了便利。
CAN通信速率高、開放性好、通信距離長,且具有多主站運行和分散仲裁的串行總線以及廣播通信的特點,與其它通信總線相比,CAN總線數(shù)據(jù)通信具有突出的高可靠性、實時性和靈活性。我們通過CAN總線還可以把通風機、車行橫洞卷簾門等相關(guān)設(shè)備的控制集成在一起。
光強、溫度、電流檢測模塊
LPC2119 內(nèi)部集成了四路10位A/D轉(zhuǎn)換器,這就給光強、溫度、電流檢測提供了極大的便利。光強檢測是通過光敏三極管來檢測環(huán)境亮度參數(shù)提供給主程序進行自動控制,也可通過此參數(shù)判斷光源的好壞。溫度參數(shù)提供設(shè)備本身和周邊環(huán)境溫度,以求設(shè)備安全可靠的工作。電流參數(shù)則是對光源的工作狀態(tài)進行不斷的監(jiān)測,交流信號經(jīng)過互感器、信號調(diào)理后直接送入LPC2119內(nèi)部集成的A/D轉(zhuǎn)換器進行電流參數(shù)的采集和變換。
開關(guān)控制模塊
LPC2119提供了多達46個通用的I/O 口,因此對照明燈進行控制是非常方便的。一個照明控制器可以根據(jù)實際情況分別或同時控制4盞、8盞、16盞照明燈。LPC2119是通過固態(tài)繼電器來對照明燈進行控制的。
為了增強系統(tǒng)的抗干擾性,本照明控制器采用了光電隔離技術(shù),所有的輸出均采用了光電耦合器將干擾信號隔離,有效地提高了系統(tǒng)的可靠性。同時由于CPU 的I/O驅(qū)動能力有限,一般不足以驅(qū)動一些電磁執(zhí)行器件,需加接驅(qū)動接口電路,為避免系統(tǒng)受到干擾,須采取隔離措施。如本例晶閘管所在的主電路是交流強電回路,電壓較高,電流較大,不易與CPU 直接相連,可應(yīng)用光耦合器將CPU的控制信號與晶閘管觸發(fā)電路進行隔離。光耦隔離驅(qū)動電路如圖3所示。
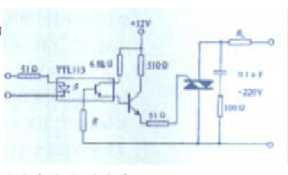
圖3 雙向可控硅隔離驅(qū)動
結(jié)語
本文介紹的智能照明控制器性能穩(wěn)定,工作可靠。同時可通過CAN網(wǎng)絡(luò)由上位機結(jié)合光強儀、車輛檢測器等進行智能控制,在隧道的建設(shè)或改造中,都可以使隧道照明的回路減到最少,不僅節(jié)約了初期投資,而且在運行期間可以大大的節(jié)約電能消耗。本智能照明控制器已開發(fā)出單回路、雙回路、四回路、八回路等系列產(chǎn)品,并已搭建成模擬網(wǎng)絡(luò)通過了測試,目前正在與某高速公路隧道業(yè)主商談實際應(yīng)用。
參考文獻:
1. LPC2119 User Manual 。
2. 周立功,ARM微控制器基礎(chǔ)與實踐,北京航空航天大學出版社,2003
3. 鄔寬明,CAN總線原理和應(yīng)用系統(tǒng)設(shè)計,北京航空航天大學出版社,1997
編輯:jq
-
cpu
+關(guān)注
關(guān)注
68文章
11070瀏覽量
216771 -
CAN
+關(guān)注
關(guān)注
57文章
2912瀏覽量
467459 -
ARM7
+關(guān)注
關(guān)注
3文章
207瀏覽量
51113 -
ISO
+關(guān)注
關(guān)注
0文章
284瀏覽量
40295
發(fā)布評論請先 登錄
隧道智能照明控制系統(tǒng)
公共照明智能控制系統(tǒng)
簡述微處理器的指令集架構(gòu)
ARM處理器的結(jié)構(gòu)和特點
ARM處理器概述和發(fā)展歷程
簡述微處理器的發(fā)展歷史
微處理器在人工智能方面的應(yīng)用
微處理器如何控制計算機系統(tǒng)
嵌入式微控制器與嵌入式微處理器的聯(lián)系
AM1705 ARM微處理器數(shù)據(jù)表

AM1808 ARM微處理器數(shù)據(jù)表
AM1707 ARM微處理器數(shù)據(jù)表
AM3715、AM3703 Sitara ARM微處理器數(shù)據(jù)表
AM1806 ARM 微處理器數(shù)據(jù)表





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論