 機器人與視覺標定理論是什么?
機器人與視覺標定理論是什么?
相機固定不動, 上往下看引導機器人移動
機器人與視覺標定理論詳解
1.相機非線性校正使用標定板做非線性校正2.相機與機器人做9點標定可以使用機器人扎9個點,或者機器人抓住工件擺放9個位置,得到9個機械坐標,相機也得到9個像素坐標,然后標定3.計算機器人的旋轉中心機器人抓取工件分別旋轉三個角度擺放到相機視野內,相機可以得到三個坐標值,通過三個坐標值擬合圓獲得圓心坐標即為旋轉中心4.相機通過公式計算得出最終的輸出結果(rx0, ry0)為旋轉中心,( x, y)為被旋轉的點,(x0,y0)旋轉后的點x0= cos (a) * (x-rx0) – sin (a) * (y-ry0) +rx0y0= cos (a) * (y-ry0) + sin (a) * (x-rx0) +ry0
相機固定不動, 下往上看
1.相機非線性校正使用機器人吸起標定板做非線性校正2.相機與機器人做9點標定可以使用實物標定,機器人抓住工件擺放9個位置,得到9個機械坐標,相機也得到9個像素坐標,然后標定。參考上面的上往下看。
相機固定在機器人上,離旋轉中心較近
1、相機非線性矯正2、相機與機器人做9點標定可以使用實物標定,機器人抓住工件擺放9個位置,得到9個機械坐標,相機也得到9個像素坐標,(機器人每次需要回到固定位置拍照),然后標定3、計算機器人的旋轉中心機器人抓取工件分別旋轉三個角度擺放到相機視野內,相機可以得到三個坐標值,通過三個坐標值擬合圓獲得圓心坐標即為旋轉中心4、相機通過公式計算得出最終輸出結果
相機固定在機器人上,離旋轉中心很遠
1、相機非線性矯正2、相機與機器人做9點標定3、計算機器人的旋轉中心4、相機通過公式計算得出最終輸出結果注:由于選擇中心距離視野很遠,通常擬合出來的旋轉中心存在比較大的誤差,給定位精度造成影響。
分離軸
分離軸的設計方式有很多,XY + θ, X+Y θ, X θ+Y…。,具體狀況具體分析,目的是要找到旋轉中心,做好9點標定。1.相機非線性校正2.相機與機器人做9點標定3.計算機器人的旋轉中心4.相機通過公式計算得出最終的輸出結果
旋轉中心標定說明
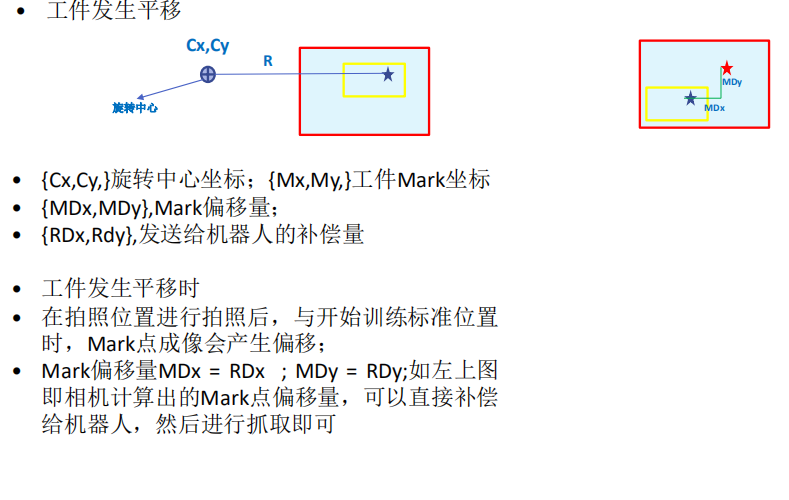
旋轉中心方法用于所有機器人與視覺配合場景方法:計算工件實際發生的偏移量和旋轉量,結合機器人的旋轉中心進行二次補償后,把補償量發送給機器人,然后機器人把補償量補償后進行抓取或放置即可;
點坐標旋轉方法
計算某個點繞另外一點旋轉一定角度后的坐標,如圖:
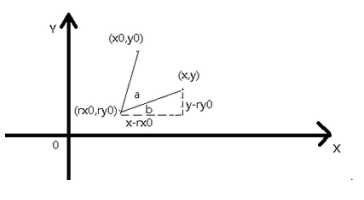
機器人與視覺標定理論詳解A(x,y)繞B(rx0,ry0)旋轉a度后的位置為C(x0,y0),則有如下關系式:x0= cos (a) * (x-rx0) – sin (a) * (y-ry0) +rx0y0= cos (a) * (y-ry0) + sin (a) * (x-rx0) +ry0
下面計算所有的旋轉和偏移量均是基于上面的公式
旋轉中心標定說明
STD方法的計算:
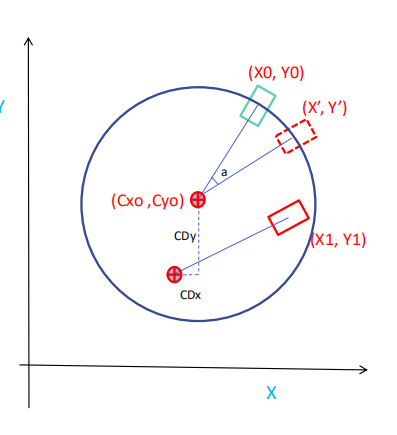
CDx= cos (a) * (Cx0-X0) – sin (a) * (Cy0-Y0) + X1 – Cx0CDy= cos (a) * (Cy0-Y0) + sin (a) * (Cx0-X0) + Y1 – Cy0X’= cos (a) * (X0-Cx0) – sin (a) * (Y0-Cy0) + Cx0Y’= cos (a) * (Y0-Cy0) – sin (a) * (X0-Cx0) + Cy0CDx=X1-X’Cdy=Y1-Y’這里是機器人在取料之前,先把自己的角度補正到與 物料當前角度一致,到(X’,Y’)位置處,然后移動 CDx,Cdy,與物料位置也重合,然后去取料。這樣就保證了每次取料后,物料相對于機器人的位置 一致,因此直接往目標位置放就可以。這種方式由于是取物料的時候調整位置,因此適用于 相機固定在機械手上、相機固定安裝從上往下看的方式。如果相機固定安裝從下往上看,由于機器人這時候已經取完料了,就不適合使用了。
特別注意
這里計算到的Cdx和Cdy一定要補償到機器人的取料位置里,不能補償到 放料位置。旋轉中心方法計算到的偏差可以直接補償到放料位置。原因如下:
旋轉中心法的計算:
(X,Y)是定位到的產品位置,(GX,GY)是標準模板位置,(X’,Y’)是補償了角度后的新位置,則:X’ = cos θ * (X-Xo) – sin θ *(Y-Yo) + Xo;Y’ = cos θ* (Y-Yo) + sin θ* (X-Xo) + Yo;Offset X=X’-GXOffset Y=Y’-GYOffset Theta= θ
求旋轉中心方法
當相機FOV與旋轉中心很近,可以用旋轉3點以上擬合一個圓求圓心當相機FOV與旋轉中心很遠,使用旋轉3或多個點求圓心,準確性會很差。
解法
(X0,Y0)為旋轉中心, (X1,Y1)及(X2,Y2)為工件在視野中旋轉角度a的前后坐標,(Xt,Yt)為兩點連線的延長。d = √(X2-X1)^2 + (Y2-Y1)^2角度aR = d/2/sin(a/2)R/d = (Xt-X1)/(X2-X1)R/d = (Yt-Y1)/(Y2-Y1)Xt = (1-R/d)*X1 + (R/d)*X2Yt = (1-R/d)*Y1 + (R/d)*Y2X0= cos (90-a/2) * (Xt-X1) – sin (90-a/2) * (Yt-Y1) +X1Y0= cos (90-a/2) * (Yt-Y1) + sin (90-a/2) * (Xt-X1) +Y1角度:X+ ? Y+ 為正,反之為負
旋轉中心標定—計算補償
CDx Cdy計算過程,旋轉角度a
機器人與視覺標定理論詳解CDx= cos (a) * (Cx0-X0) – sin (a) * (Cy0-Y0) + X1 – Cx0= (cos (a) -1) * (Cx0-X0) – sin (a) * (Cy0-Y0) + MDx= (cos (a) -1) * StDx- sin (a) * StDy+ MDxCDy= cos (a) * (Cy0-Y0) + sin (a) * (Cx0-X0) + Y1 – Cy0= (cos (a) -1) * (Cy0-Y0) + sin (a) * (Cx0-X0) + Mdy= (cos (a) -1) * StDy + sin (a) * StDx + Mdy從公式中可以看出StDx = Cx0-X0,StDy = Cy0-Y0是個常量,MDx和Mdy是每次拍照是工件(Mark)的坐標與標準位置工件(Mark)的差值;StDx與StDy怎么計算呢?藍色的為一個二元一次方程,我們需要旋轉一個角度即可計算出;如果計算出StDx和StDy則在運行時,直接帶入上述公式,可以很快計算出CDx,Cdy這樣給出Robot的偏移量了,而不需要計算旋轉中心的確切坐標了;
如何求解StDx和StDy
StDx,StDy計算過程,首先Robot在拍照點旋轉一定角度a(一定是Robot給出)機器人與視覺標定理論詳解CDx= cos (a) * (Cx0-X0) – sin (a) * (Cy0-Y0) + X1 – Cx0= (cos (a) -1) * (Cx0-X0) – sin (a) * (Cy0-Y0) + MDx= (cos (a) -1) * StDx- sin (a) * StDy+ MDxCDy= cos (a) * (Cy0-Y0) + sin (a) * (Cx0-X0) + Y1 – Cy0= (cos (a) -1) * (Cy0-Y0) + sin (a) * (Cx0-X0) + Mdy= (cos (a) -1) * StDy + sin (a) * StDx + Mdy下面介紹如何求解StDx和StDy,旋轉一定角度a后MDx和Mdy則為確定值,cos(a)和sin(a)為確定值0= (cos (a) -1) * StDx- sin (a) * StDy+ MDx0= (cos (a) -1) * StDy + sin (a) * StDx + MdyStDx = -0.5*(Mdx*(cos(a)-1)+Mdy*sin(a)) / (1-cos(a))StDy = 0.5*(Mdx*sin(a)-Mdy*(cos(a)-1))/(1-cos(a))a是旋轉標準的角度Mdx=X1-X0,即旋轉后Mark坐標與訓練模板的mark坐標
原文標題:機器人與視覺標定理論詳解
文章出處:【微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
責任編輯:haq
-
機器人
+關注
關注
213文章
29525瀏覽量
211687 -
機器視覺
+關注
關注
163文章
4516瀏覽量
122342
原文標題:機器人與視覺標定理論詳解
文章出處:【微信號:vision263com,微信公眾號:新機器視覺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
盤點#機器人開發平臺
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】+ROS2應用案例
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】+初品的體驗
解鎖機器人視覺與人工智能的潛力,從“盲人機器”改造成有視覺能力的機器人(上)

助力風電行業!深視智能SR7400線激光以機器人手眼標定實現風力葉片切割引導

工業機器人視覺技術的應用分為哪幾種?
機器人視覺與計算機視覺的區別與聯系
機器人視覺的應用范圍






 工商網監
工商網監
評論