") 研究團(tuán)隊(duì)設(shè)計(jì)出像大白一樣的擁抱機(jī)器人
研究團(tuán)隊(duì)設(shè)計(jì)出像大白一樣的擁抱機(jī)器人

你還記得大白嗎?那個(gè)萌萌的會(huì)主動(dòng)給人溫暖擁抱的機(jī)器人?
現(xiàn)如今,來自德國馬克斯 - 普朗克研究所(MPI-IS)和蘇黎世聯(lián)邦理工學(xué)院(ETH Zürich)的研究團(tuán)隊(duì)就設(shè)計(jì)出了像大白一樣的擁抱機(jī)器人。
德國馬克斯?普朗克智能系統(tǒng)研究所和蘇黎世聯(lián)邦理工學(xué)院的研究人員最近研發(fā)出了機(jī)器人 HuggieBot 2.0。它是根據(jù)亞歷西斯 E. 布洛克(Alexis E. Block)在碩士學(xué)位期間創(chuàng)建的原始機(jī)器人 1.0 版本的基礎(chǔ)上開發(fā)的二代機(jī)器人,這個(gè)機(jī)器人可以根據(jù)用戶的要求指令來擁抱用戶。
布洛克研究機(jī)器人的初衷是源于對(duì)遠(yuǎn)方親人的思念,“我們都有遠(yuǎn)方的家人,我們想擁抱他們,這就是項(xiàng)目背后的主要靈感。”
該機(jī)器人的早期版本是一代機(jī)器人 HuggieBot 1.0。但從用戶的反饋來看,第一代的擁抱機(jī)器人體型太大了,在用戶體驗(yàn)上并不好,并且它的背后只有一個(gè)小型的觸摸傳感器,導(dǎo)致它不能更好地去感受和回應(yīng)用戶。
2017 年布洛克開始攻讀博士學(xué)位,她繼續(xù)對(duì)擁抱機(jī)器人進(jìn)行研發(fā)。她與德國 MPI-IS 的主要主管庫亨貝克(Kuchenbecker),還有蘇黎世聯(lián)邦理工學(xué)院的聯(lián)合主管奧特瑪?希利格斯(Otmar Hilliges)和羅杰?加瑟(Roger Gasser)一起繼續(xù)研發(fā) HuggieBot 項(xiàng)目,并創(chuàng)造出了一個(gè)全新的擁抱機(jī)器人。
新開發(fā)的機(jī)器人是根據(jù)六項(xiàng)原則設(shè)計(jì)構(gòu)建的,這也是對(duì)機(jī)器人的 “命令”。研究者們認(rèn)為擁抱機(jī)器人應(yīng)該柔軟、溫暖、與人一樣大小、視覺上能夠感知用戶、根據(jù)用戶的體型和位置調(diào)整擁抱,并在用戶想要結(jié)束擁抱時(shí)適時(shí)地松開懷抱。根據(jù)這些命令,HuggieBot 2.0 就擁有了更自然更有趣的擁抱能力。
而且神奇的是,HuggieBot 2.0 跟大白一樣也是個(gè)柔軟的充氣機(jī)器人。布洛克和她的同事們在定制的金屬框架上安裝了兩個(gè) Kinova JACO 臂,這是通常連接到輪椅上的市售機(jī)械臂。
與以前的版本相比,該機(jī)器人擁有可充氣且柔軟的軀干,并且無論用戶的手放在哪里,它都可以感知到用戶的接觸。機(jī)器人的身上有加熱墊,它穿搭著一件紫色長袍和一件灰色運(yùn)動(dòng)衫,手上還帶著一雙軟乎乎的連指手套。
HuggieBot 2.0 機(jī)器人還會(huì)微笑和眨眼,它的頭部由 3D 打印創(chuàng)建,頭部包含一臺(tái)電腦、一個(gè)顯示屏幕、一個(gè)深度傳感攝像頭、一個(gè)揚(yáng)聲器和一個(gè)微控制器組成。機(jī)器人頭部的紫色背景屏幕上會(huì)顯示出不同的動(dòng)畫面部表情,讓人感覺機(jī)器人在微笑和眨眼睛。
一旦用戶向機(jī)器人走去,機(jī)器人的攝像頭就會(huì)檢測到其視野內(nèi)的用戶。機(jī)器人就會(huì)抬起手臂并詢問用戶:“可以給我一個(gè)擁抱嗎?”
HuggieBot 2.0 的 JACO 手臂在每個(gè)關(guān)節(jié)處都有扭矩傳感器,通過使用扭矩閾值抓握方法,機(jī)器人的抓握會(huì)更加具有適應(yīng)性和安全性,這樣就確保了機(jī)器人與不同的用戶身體相匹配,并且擁抱的力度也會(huì)恰到好處,不會(huì)出現(xiàn)將人擁抱得太緊或太松的情況。
為了實(shí)現(xiàn)觸覺釋放,研究人員使用了兩種不同的方法。首先,利用機(jī)器人手臂上的扭矩傳感器來檢測用戶何時(shí)希望結(jié)束擁抱。然后,利用充氣傳感軀干來檢測用戶何時(shí)從機(jī)器人的背部移開手臂。這些功能讓 HuggieBot 2.0 成為了更自然、更直觀的擁抱機(jī)器人。
布洛克和她的同事還對(duì)比測試了一代和二代機(jī)器人,一共有 117 位用戶參與了試驗(yàn),他們觀看了 HuggieBot 1.0 和 HuggieBot 2.0 的視頻和圖像之后,無論是從外觀還是動(dòng)作上,大部分的參與者都喜歡 2.0 這款新版本的機(jī)器人。
隨后,32 位體驗(yàn)者親自體驗(yàn)了擁抱機(jī)器人。參與者與機(jī)器人擁抱后表示,他們覺得 HuggieBot 2.0 機(jī)器人動(dòng)作自然、智能并且友好。總的來說,HuggieBot 2.0 機(jī)器人能夠和用戶進(jìn)行更加愉快的交互體驗(yàn)。
目前,布洛克和她的同事在調(diào)研反饋之后進(jìn)一步完善了機(jī)器人,并創(chuàng)造出了 3.0 版本 HuggieBot 3.0。
除了硬件和軟件方面的改進(jìn)之外,HuggieBot 3.0 還著重于讓機(jī)器人能夠分辨并對(duì)擁抱中的手勢做出反應(yīng),比如對(duì)摩擦、輕拍和擠壓做出互動(dòng)響應(yīng)。
研究人員目前也在評(píng)估機(jī)器人擁抱對(duì)人所產(chǎn)生的生理影響。眾所周知,與人類還有動(dòng)物進(jìn)行身體接觸會(huì)帶來多種健康益處,例如降低血壓和皮質(zhì)醇水平、減輕壓力和焦慮、加強(qiáng)社會(huì)紐帶和免疫系統(tǒng)以及增加催產(chǎn)素水平。
但是對(duì)機(jī)器人物理接觸產(chǎn)生的生理影響方面的研究還很缺乏,布洛克和她的同事們最終希望通過研究找出機(jī)器人的擁抱是否能像人類或動(dòng)物一樣減輕壓力并改善身體健康。
此外,研究人員還開發(fā)了 HuggieApp,該應(yīng)用程序允許用戶通過 HuggieBot 機(jī)器人遠(yuǎn)程相互發(fā)送自定義的擁抱,研究人員還希望測試 HuggieBot 能否加強(qiáng)遙遠(yuǎn)距離的人之間的相互關(guān)系。
盡管 HuggieBot 2.0 和 HuggieBot 3.0 仍處在原型階段,但研究團(tuán)隊(duì)希望最終將其商業(yè)化。商業(yè)化的下一步目標(biāo)是針對(duì)大型機(jī)構(gòu),比如大學(xué)、醫(yī)院或療養(yǎng)院。研究人員相信,未來可定制的應(yīng)用程序?qū)⒊蔀樯虡I(yè)擁抱機(jī)器人的必要組成部分。
原文標(biāo)題:可以給我一個(gè)擁抱嗎? 像大白一樣溫暖求抱抱的機(jī)器人問世
文章出處:【微信公眾號(hào):DeepTech深科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
責(zé)任編輯:haq
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29709瀏覽量
212697
原文標(biāo)題:可以給我一個(gè)擁抱嗎? 像大白一樣溫暖求抱抱的機(jī)器人問世
文章出處:【微信號(hào):deeptechchina,微信公眾號(hào):deeptechchina】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
云深處科技利用Arm架構(gòu)打造AI機(jī)器人
一天吃透一條產(chǎn)業(yè)鏈:具身智能(AI+機(jī)器人)

輪式移動(dòng)機(jī)器人電機(jī)驅(qū)動(dòng)系統(tǒng)的研究與開發(fā)
腦機(jī)接口柔性微電極植入機(jī)器人問世
盤點(diǎn)#機(jī)器人開發(fā)平臺(tái)
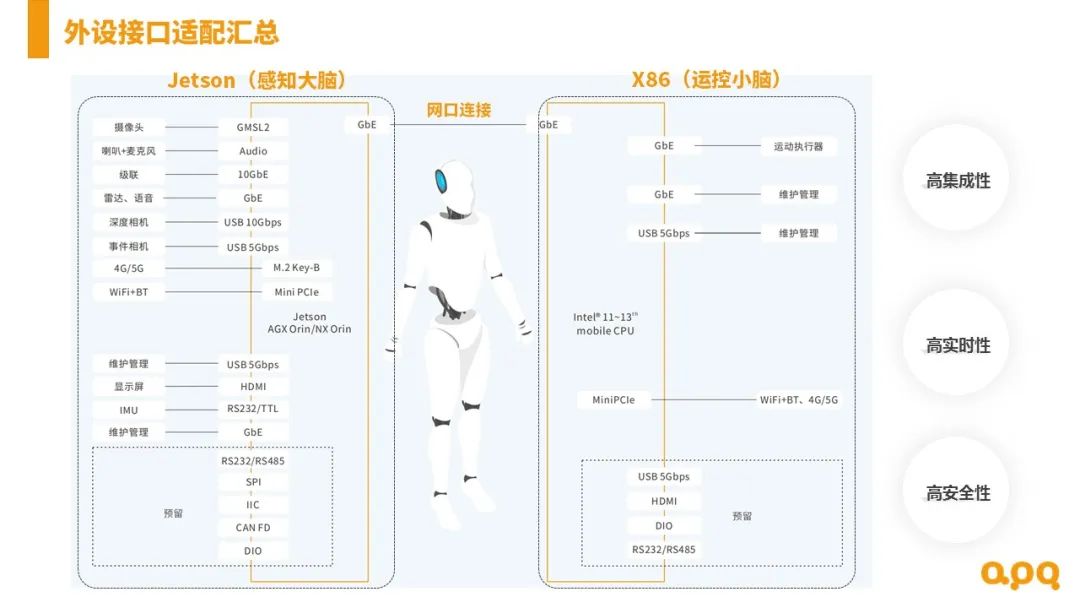
從感知到運(yùn)控:具身智能機(jī)器人控制器的雙腦協(xié)同設(shè)計(jì)與場景適配





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論