 機載激光雷達無人機挑戰海拔高地區
機載激光雷達無人機挑戰海拔高地區

2018年,國家長江辦發布《推動長江經濟帶沿江高鐵通道建設實施方案》,沿江高鐵連通長三角、長江中游和成渝三大城市群,是國家高速鐵路網“八縱八橫”主通道的重要組成部分。
今年擬建的宜涪高鐵,位于湖北省和重慶市境內,線路東起宜昌市,途經恩施,西至重慶市涪陵區,線路全長450km,是沿江高鐵“三步走”戰略的重要路段。
01
項目概況
本次項目是宜昌至恩施段地形勘測,測區最低海拔300米,最高海拔2000米。測區點較多且分散,但測區均分布在落差較大地段,獨立測區最大高差600米左右。
項目要求:01
獲取植被下地面點(DEM)
02 植被下地面點云密度大于2點/㎡ 03 高程精度優于10cm
項目難點
1
海拔高、高差大
測區全境皆山,溝谷深切,地形陡峻
2
僅靠人工調查難度大
工期長、效率低,且危險系數較高
03
解決方案
鑒于項目測區植被茂密,且最大高差可達600米,按常規作業模式規劃航線,無人機距離測區最低點高達700米,必然導致激光穿透植被過少,獲取的地面點過少。
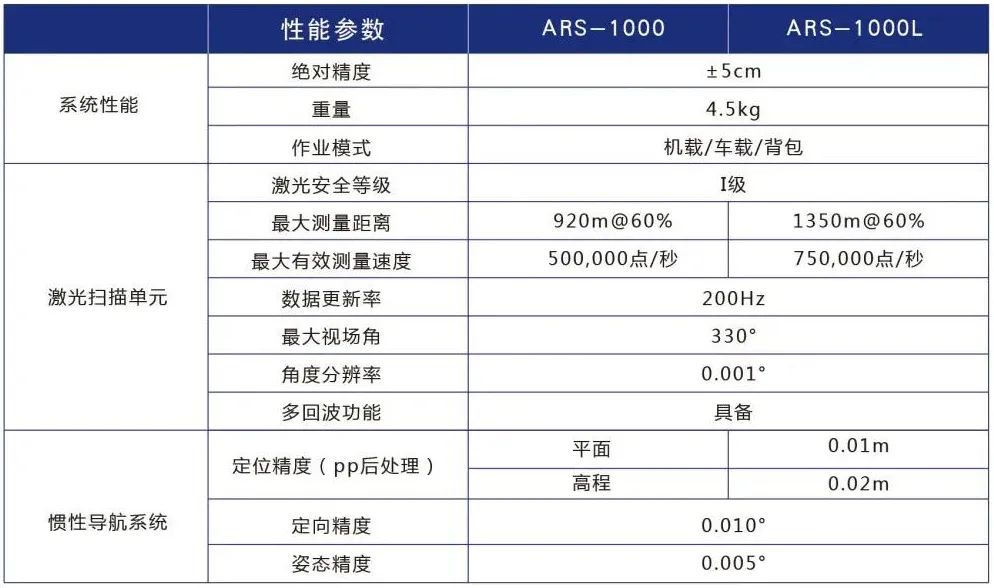
本次項目采用Long120六旋翼無人機,搭載ARS1000L激光測量系統,通過仿地變高飛行手段,減小無人機雷達系統與地面的距離,從而保證激光能打透密林,獲得滿足精度需求的數據。
設備一覽 1系統優勢
測程長,激光雷達最遠測距1350m;
續航長,無人機載荷作業可達50分鐘;
仿地飛行:尤其適合高海拔、大落差地形。
2技術參數
04
技術路線
1預規劃航線
選擇航線進入測區角度,擬選起降點,優選海拔高位置。
自動生成仿地航線
2進行仿地飛行作業
起飛作業,自動化航線安全檢查,保證無人機能長時間處于勻速狀態,并現場勘查測區范圍內是否存在高塔、電塔等建筑物,在確保安全飛行的條件下,進行仿地飛行作業。
05
成果展示
1精度報告
將激光點與對應區域驗證點進行比對,統計高差精度,高程誤差平均值-0.021m,中誤差0.025m,均小于10cm,滿足要求。
統計平面精度,平面精度標準差為0.0896m,滿足要求。
2點云密度計算
本次項目,點云分類前平均40點/㎡,分類后地面點,在植被覆蓋茂盛區域平均6點/㎡,滿足客戶需求。在非茂盛植被覆蓋區域平均15點/㎡。
06
項目總結
針對測區高海拔、高落差地形特點,本次項目采用了Long120六旋翼無人機搭載ARS1000L激光雷達進行仿地飛行作業,不用分割測區,減少了起降架次,更減少了高度差對數據精度的影響,外業工作更高效。
責任編輯:haq
-
無人機
+關注
關注
231文章
10841瀏覽量
186745 -
激光雷達
+關注
關注
971文章
4234瀏覽量
192836
原文標題:挑戰高落差山區地形勘測,這個機載激光雷達太可以了
文章出處:【微信號:CAACES,微信公眾號:中航易成】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
10000Hz!超高頻激光雷達助力無人機避障
鐳神智能 MS09 超遠距低空管控反無人機探測激光雷達:為低空經濟筑牢安全防線

3000W激光反制無人機系統 - 全天候守護重點區域安全防線
原理圖下載 高性價比無人機載合成孔徑雷達系統
鐳神智能無人機探測激光雷達產品矩陣:構筑低空安防的智慧天眼
ZY2000低空安防激光系統:全天候無人機反制解決方案
北醒攜新一代航空器用激光雷達亮相CES2025

海外首款由激光雷達驅動的無人機發布
激光雷達技術或可助力防御無人機
激光雷達技術的基于深度學習的進步
激光雷達在無人機中的應用實例
激光雷達技術的發展趨勢
鐳神智能激光雷達低空無人機目標追蹤光電系統:筑牢機場低空安防屏障
激光雷達與毫米波雷達的優缺點是什么
無人機機載高光譜成像系統的應用及優勢





 工商網監
工商網監
評論