") 深度探討UWB技術(shù)的工作原理
深度探討UWB技術(shù)的工作原理
要知道:超寬帶技術(shù) (UWB) 是最佳定位跟蹤技術(shù),您應(yīng)該使用這項(xiàng)技術(shù)。沒(méi)了,感謝閱讀本書(shū)。
當(dāng)然,只是開(kāi)個(gè)玩笑。我們可以說(shuō) UWB 是當(dāng)今最好、最先進(jìn)的定位技術(shù),但證據(jù)呢?要回答這個(gè)問(wèn)題,我們需要透過(guò)現(xiàn)象看本質(zhì)。
本章探討了 UWB 技術(shù)的內(nèi)部工作原理,并概述了 UWB 和窄帶定位方法之間的差異。此外,本章還說(shuō)明了如何針對(duì)不同的應(yīng)用或用例場(chǎng)景選擇最佳的系統(tǒng)架構(gòu)。
UWB 與窄帶進(jìn)行比較
適用于室內(nèi)和室外定位應(yīng)用的技術(shù)有多種,但 UWB 最精確、最可靠且最具成本效益;通常也更具可擴(kuò)展性。將 UWB 技術(shù)與最流行的窄帶方法進(jìn)行比較,可以清楚地說(shuō)明這一點(diǎn),這也是我們?cè)诒竟?jié)要做的。
一切都取決于帶寬
從一開(kāi)始,脈沖無(wú)線電 UWB 的設(shè)計(jì)目的就是實(shí)現(xiàn)高精度測(cè)距估計(jì),同時(shí)進(jìn)行雙向通信。這樣它就可以收集傳感器數(shù)據(jù),并控制執(zhí)行器。
脈沖無(wú)線電是 UWB 信號(hào)的一種形式,它的特性使其成為密集多徑環(huán)境中定位和通信服務(wù)的理想選擇。
除了其定位功能,Qorvo UWB 技術(shù)還符合 IEEE 802.15.4a 標(biāo)準(zhǔn)和近期發(fā)布的 IEEE 802.15.4z 標(biāo)準(zhǔn)。因此,除了厘米級(jí)測(cè)距精度,開(kāi)發(fā)人員還強(qiáng)調(diào)要確保該技術(shù)穩(wěn)定且不受各種干擾的影響,從而實(shí)現(xiàn)更高的可靠性。制定該標(biāo)準(zhǔn)時(shí),還考慮了低功耗和低成本因素,以及支持大量互連設(shè)備的能力。工程師們?cè)趧?chuàng)建該標(biāo)準(zhǔn)時(shí)有一個(gè)愿景:讓每個(gè)互連對(duì)象都具有“定位感知”能力。
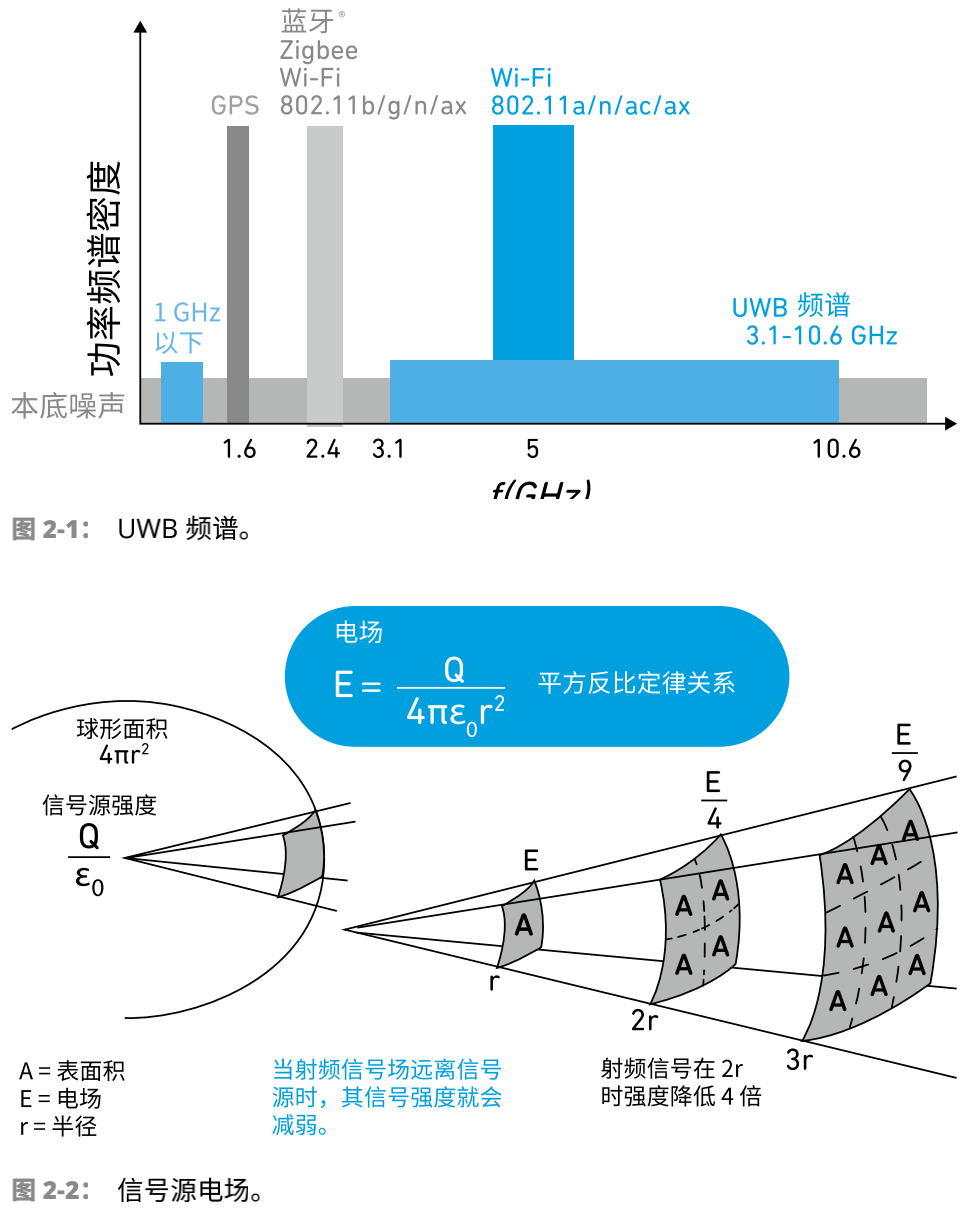
聯(lián)邦通信委員會(huì) (FCC) 將 UWB 無(wú)線電頻率范圍定義為 3.1 GHz 至 10.6 GHz,最低信號(hào)帶寬為 500 MHz(參見(jiàn)圖 2-1)。與其他無(wú)線電技術(shù)不同,UWB 并不使用幅度或頻率調(diào)制來(lái)編碼其信號(hào)傳輸?shù)男畔ⅰO喾矗琔WB 采用非常窄的短脈沖序列,利用二進(jìn)制相移鍵控 (BPSK) 和/或脈位調(diào)制 (BPM) 對(duì)數(shù)據(jù)進(jìn)行編碼。使用窄脈沖導(dǎo)致傳輸表現(xiàn)出寬帶寬特性,從而可以擴(kuò)大范圍,降低對(duì)窄帶干擾的敏感度,并且能夠在存在多路徑反射的情況下運(yùn)行。
RSSI 的限制
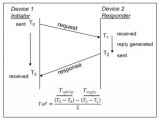
在當(dāng)今的許多應(yīng)用中,定位跟蹤采用接收信號(hào)強(qiáng)度指示器 (RSSI) 實(shí)現(xiàn)。在 RSSI 應(yīng)用中,無(wú)線電信號(hào)的強(qiáng)度隨自由空間中與發(fā)射機(jī)距離的平方反比而變化,如圖 2-2 所示。當(dāng)信號(hào)遠(yuǎn)離信號(hào)源時(shí),信號(hào)強(qiáng)度就會(huì)減弱。
將 RSSI 配合 Wi-Fi 和藍(lán)牙 802.11 標(biāo)準(zhǔn)一起使用。根據(jù)已知的發(fā)射端設(shè)備的發(fā)射功率,就可以預(yù)測(cè)設(shè)備之間的距離。然而,這些類(lèi)型的測(cè)量也存在缺陷,我們接下來(lái)會(huì)進(jìn)行討論。
使用藍(lán)牙的定位跟蹤
藍(lán)牙定位跟蹤,如藍(lán)牙低功耗 (BLE) 信標(biāo),在某些情況下很有效。信標(biāo)主要用于接近檢測(cè)。它們會(huì)在設(shè)備(如電話)處于覆蓋范圍內(nèi)時(shí)進(jìn)行檢測(cè),并通過(guò)區(qū)分信號(hào)強(qiáng)度 (RSSI) 的強(qiáng)弱來(lái)估算距離。
這種方法的問(wèn)題在于,信號(hào)強(qiáng)度并不能很好地反映距離。如果信號(hào)強(qiáng)度低,是意味著電話離信標(biāo)很遠(yuǎn),還是意味著信標(biāo)和電話之間存在一個(gè)巨大的柱子?如圖 2-3 所示,每個(gè)信標(biāo)與接收電話之間的視線 (LOS) 有好有壞;每個(gè)障礙物都會(huì)改變距離測(cè)量的整體精度。
設(shè)備 A 可以從會(huì)議室天花板上的信標(biāo)接收到非常強(qiáng)的信號(hào),但墻壁使會(huì)議室外部附近角落的信標(biāo)信號(hào)明顯減弱,而這兩個(gè)信標(biāo)與設(shè)備 A 的距離大致相同。設(shè)備 B 不在任何信標(biāo)的 LOS 范圍內(nèi),因此,所有信號(hào)都明顯減弱,而設(shè)備 C 處于開(kāi)放式辦公室中多個(gè)信標(biāo)的 LOS 范圍內(nèi)。所以信號(hào)強(qiáng)度更強(qiáng),因?yàn)樗p更少。
解決這個(gè)問(wèn)題的變通方案就是使用一種叫做“指紋識(shí)別”的方法。先利用安裝在幾米遠(yuǎn)固定位置的信標(biāo)測(cè)量已知位置其他信標(biāo)的信號(hào)強(qiáng)度。將這些信號(hào)強(qiáng)度信息保存在指紋識(shí)別數(shù)據(jù)庫(kù)中。然后,信標(biāo)通過(guò)比較其信號(hào)強(qiáng)度與指紋識(shí)別數(shù)據(jù)庫(kù)中的數(shù)據(jù),就可以確定設(shè)備的距離和位置。根據(jù)最接近的匹配即可獲得位置測(cè)量結(jié)果。
指紋識(shí)別有許多版本,它們使用各種各樣復(fù)雜的算法。請(qǐng)記住,這些系統(tǒng)只是變通方案。它們并不能以 UWB 等技術(shù)的精度真正解決距離測(cè)量問(wèn)題。
使用 Wi-Fi 的定位跟蹤
Wi-Fi 是室內(nèi)定位應(yīng)用最常用的無(wú)線電信號(hào)。它仍然是使用最廣泛的室內(nèi)定位技術(shù),并且經(jīng)常與 BLE 結(jié)合使用。Wi-Fi 的主要優(yōu)勢(shì)在于,大多數(shù)公共或私人場(chǎng)所都提供 Wi-Fi。
然而,使用 Wi-Fi 信號(hào)強(qiáng)度估算距離會(huì)面臨與藍(lán)牙相同的挑戰(zhàn)。一些公司已經(jīng)開(kāi)發(fā)出替代算法,試圖使用 Wi-Fi 信號(hào)的飛行時(shí)間 (ToF) 或到達(dá)時(shí)間 (ToA) 來(lái)更精確地測(cè)量距離,但這無(wú)法直接使用標(biāo)準(zhǔn)的 Wi-Fi 硬件實(shí)現(xiàn)。
ToF 是一種通過(guò)將信號(hào)的 ToF 乘以光速來(lái)測(cè)量?jī)蓚€(gè)無(wú)線電收發(fā)器之間距離的方法。ToA 是無(wú)線電信號(hào)從發(fā)射機(jī)到達(dá)遠(yuǎn)程接收機(jī)的時(shí)間點(diǎn)。
通過(guò)在網(wǎng)絡(luò)中添加更多信標(biāo),可以在一定程度上提高 RSSI 指紋識(shí)別的準(zhǔn)確性。盡管精度可能會(huì)提高一點(diǎn),但卻無(wú)法提高測(cè)量的整體可靠性。此外,如果平面圖有任何變化,指紋識(shí)別數(shù)據(jù)庫(kù)也需要更新,這可能既耗費(fèi)成本又耗時(shí)。
為什么說(shuō) UWB 最適合室內(nèi)定位跟蹤
UWB 的固有特性意味著,它可以實(shí)現(xiàn)比其他技術(shù)更精確的室內(nèi)定位和距離測(cè)量。
如圖 2-4 所示,UWB 脈沖(中間和右側(cè)圖)只有 2 納秒 (ns) 寬,因此不受反射信號(hào)(多路徑)干擾和噪聲的影響。UWB 射頻 (RF) 脈沖邊緣清晰,因此在存在日常環(huán)境中常見(jiàn)的信號(hào)反射和多路徑效應(yīng)的情況下仍能精確測(cè)定到達(dá)時(shí)間和距離。
將 UWB 作為解決方案時(shí),反射信號(hào)(灰色)不會(huì)影響直接信號(hào)(藍(lán)色)。IR-UWB 信號(hào)(中間和右側(cè))的上升和下降時(shí)間(邊沿)比標(biāo)準(zhǔn)窄帶信號(hào)(左側(cè))更短,因此可以精確地測(cè)量信號(hào)的到達(dá)時(shí)間。這也有助于 UWB 信號(hào)在存在噪聲和多徑效應(yīng)的情況下保持其完整性和結(jié)構(gòu)。
即使在噪聲條件下,如圖 2-4(右側(cè))所示,2ns 寬的脈沖無(wú)線電 UWB 脈沖的到達(dá)時(shí)間幾乎未受影響。相比之下,如圖 2-5 所示,窄帶信號(hào)受到噪聲的影響比較明顯。
我們已使用窄帶無(wú)線電技術(shù)對(duì)基于 ToF 的方法進(jìn)行了試驗(yàn)。窄帶信號(hào)對(duì)多路徑非常敏感,因?yàn)榉瓷湫盘?hào)(深灰色)可與直達(dá)經(jīng)信號(hào)(淺灰色)進(jìn)行具有破壞性的結(jié)合,從而在接收機(jī)端生成最終信號(hào)(藍(lán)色)。這會(huì)影響信號(hào)超越閾值(用于測(cè)量 ToA)的時(shí)間,從而降低精度。
UWB 的精度優(yōu)勢(shì)非常明顯。UWB 完全能夠以 5 至 10 厘米的精度測(cè)量距離和位置。相比之下,藍(lán)牙、Wi-Fi 以及其他窄帶無(wú)線電標(biāo)準(zhǔn)只能實(shí)現(xiàn)米級(jí)精度。此外,由于 UWB 無(wú)線電脈沖極短,多徑效應(yīng)下,直達(dá)徑信號(hào)不會(huì)與多徑信號(hào)重疊,因此不會(huì)損壞信號(hào)完整性和強(qiáng)度。
這表明,UWB 具有以下特性
超精準(zhǔn),提供厘米級(jí)精度,比 BLE 和 Wi-Fi 精確 100 倍
超可靠,在存在多徑反射的情況下能夠保持信號(hào)完整性
實(shí)時(shí),延遲比全球定位系統(tǒng) (GPS) 低 50 倍,比標(biāo)準(zhǔn)信標(biāo)低 3,000 倍
UWB 系統(tǒng)考慮因素回顧
在本節(jié)中,我們來(lái)簡(jiǎn)要介紹一下 UWB 的系統(tǒng)組件,以及硬件和軟件選擇如何影響系統(tǒng)的性能。
錨點(diǎn)和標(biāo)簽
要了解 UWB 系統(tǒng),您需要理解錨點(diǎn)和標(biāo)簽這兩個(gè)術(shù)語(yǔ)。錨點(diǎn)通常就是固定的 UWB 設(shè)備。標(biāo)簽通常是指移動(dòng)的 UWB 設(shè)備。錨點(diǎn)和標(biāo)簽可交換信息,以便確定兩者之間的距離。標(biāo)簽的確切位置可通過(guò)與多個(gè)錨點(diǎn)通信來(lái)確定。
一些設(shè)備即可作為錨點(diǎn),也可作為標(biāo)簽。例如,當(dāng)兩個(gè)移動(dòng)手機(jī)使用 UWB 來(lái)計(jì)算相互之間的距離時(shí),它們可以在計(jì)算過(guò)程中轉(zhuǎn)化角色,交替地用作標(biāo)簽和錨點(diǎn)。
存儲(chǔ)單元和處理能力
典型的 UWB 設(shè)備需要具備一定程度處理能力和特定功能。對(duì)于簡(jiǎn)單的標(biāo)簽,要求處理器具有少量的閃存(可編程非易失性存儲(chǔ)器)和數(shù)據(jù)存儲(chǔ)器(易失性隨機(jī)存取存儲(chǔ)器,或 RAM)。對(duì)于錨點(diǎn)應(yīng)用,比如到達(dá)時(shí)間差 (TDoA) 中使用的錨點(diǎn),可能需要具有更多閃存和 RAM 的處理器,在許多情況下還需要數(shù)據(jù)回傳。
圖 2-7 顯示了標(biāo)簽(具有運(yùn)動(dòng)檢測(cè))或錨點(diǎn)(具有回傳接口,如以太網(wǎng)或 Wi-Fi 接口)的常見(jiàn)架構(gòu)。對(duì)于錨點(diǎn),可能需要不同類(lèi)型的處理器,具體取決于系統(tǒng)規(guī)模和工作負(fù)載/吞吐量需求。
另一個(gè)系統(tǒng)考慮因素就是天線。不同的應(yīng)用會(huì)需要不同的天線。例如,標(biāo)簽通常使用小型全向性天線。錨點(diǎn)則可能要使用定向天線,具體取決于拓?fù)浣Y(jié)構(gòu)。
軟件棧
UWB 通信組件和應(yīng)用之間的重要互連就是 UWB 軟件棧,如圖 2-8 所示。軟件棧有助于協(xié)調(diào)與外部設(shè)備的互操作性和共存。此外,軟件可實(shí)現(xiàn) UWB 通信組件和內(nèi)部微控制器之間的通信。例如,在控制智能手機(jī)和汽車(chē)之間的連接時(shí),軟件負(fù)責(zé)協(xié)調(diào)通信。
軟件還可以同時(shí)管理多個(gè)應(yīng)用和用例。例如,某個(gè)解決方案可能是控制揚(yáng)聲器、照明裝置、加熱系統(tǒng)等智能家居生態(tài)系統(tǒng)的組成部分。它可以與所有 UWB 標(biāo)簽和 UWB 支持設(shè)備通信,同時(shí)利用位置信息控制環(huán)境、鎖門(mén)和開(kāi)門(mén)、啟用和禁用報(bào)警系統(tǒng)等。UWB 軟件棧可同時(shí)處理所有這些不同的情況。
使用 UWB 軟件棧可確保 UWB 通信組件滿足不同應(yīng)用的需求。此外,從最終用戶和整體系統(tǒng)設(shè)計(jì)角度來(lái)說(shuō),利用該軟件的許多功能可以讓事情變得更簡(jiǎn)單。
功能優(yōu)先級(jí)排序
在一些應(yīng)用場(chǎng)景下,不同功能需要進(jìn)行優(yōu)先級(jí)排序。例如,假設(shè)在某個(gè)應(yīng)用中,電源管理和電池使用壽命很重要,比位置更新速率或數(shù)據(jù)吞吐量更重要。在這種情況下,可使用軟件優(yōu)化功耗,將設(shè)備設(shè)置為不用時(shí)關(guān)閉,需要通信時(shí)開(kāi)啟。
另一種情況就是,傳感器 LOS 信號(hào)不理想或是來(lái)自不同的方向。此時(shí),可使用軟件將結(jié)果平均,以獲得精確的距離信息;軟件還可以平滑處理比其他信號(hào)更嘈雜的信號(hào)。為了獲得更精確的結(jié)果(尤其是在快速移動(dòng)應(yīng)用中),或?yàn)榱颂砑佑嘘P(guān)設(shè)備方向的信息,軟件還可以將來(lái)自 UWB 芯片組的數(shù)據(jù)與來(lái)自慣性測(cè)量裝置(包括加速計(jì)、陀螺儀和磁力計(jì)等)的數(shù)據(jù)整合在一起。
UWB 拓?fù)浣Y(jié)構(gòu)比較和選擇
UWB 利用 ToF 的概念,這是一種通過(guò)將信號(hào)的 ToF 乘以光速來(lái)測(cè)量?jī)蓚€(gè)無(wú)線電收發(fā)器之間距離的方法。基于這個(gè)基本原理,可根據(jù)目標(biāo)應(yīng)用的需求以不同的方式實(shí)現(xiàn) UWB 定位技術(shù)。
最佳拓?fù)浣Y(jié)構(gòu)主要由應(yīng)用決定。這也就是說(shuō),設(shè)計(jì)工程師首先要將應(yīng)用和拓?fù)浣Y(jié)構(gòu)匹配。可供選擇的方法有:
雙向測(cè)距 (TWR):如圖 2-9 所示,TWR 方法可通過(guò)測(cè)定 UWB 射頻信號(hào)的 ToF,然后將該時(shí)間乘以光速來(lái)計(jì)算標(biāo)簽與錨點(diǎn)之間的距離。汽車(chē)無(wú)鑰門(mén)禁系統(tǒng)就是使用 TWR 方法的一個(gè)應(yīng)用示例 TWR 可生成一個(gè)安全空間,類(lèi)似于一個(gè)安全氣泡,同時(shí)確保在應(yīng)用的時(shí)候,這個(gè)氣泡保持高精度的安全控制。
如果您在兩個(gè)設(shè)備之間實(shí)施 TWR 方案,則可以獲得設(shè)備之間的距離信息。在 TWR 方案的基礎(chǔ)上,您還可以在移動(dòng)標(biāo)簽和固定錨點(diǎn)之間實(shí)現(xiàn) 2D 甚至 3D 位置測(cè)量;稱為“三邊測(cè)量法”。
采用 TWR 方法,可交換三條消息。標(biāo)簽通過(guò)發(fā)送一條含已知錨點(diǎn)地址的輪詢消息啟動(dòng) TWR。錨點(diǎn)記錄輪詢接收時(shí)間,并回復(fù)響應(yīng)消息。在收到響應(yīng)消息后,標(biāo)簽記錄時(shí)間并編寫(xiě)最后一條消息。錨點(diǎn)可利用最后一條消息中的信息確定 UWB 信號(hào)的 ToF。
TWR 方法也可用于 2D/3D 資產(chǎn)場(chǎng)景。顯示使用監(jiān)聽(tīng)器的雙向測(cè)距,顯示使用數(shù)據(jù)標(biāo)簽回程的 TWR。數(shù)據(jù)回傳可以使用多種方法(如 Wi-Fi、NB-IoT、LTE-M 等)實(shí)現(xiàn),通過(guò)這些方法將數(shù)據(jù)傳輸至云。
到達(dá)時(shí)間差 (TDoA) 和反向 TDoA:TDoA 和反向 TDoA 方法類(lèi)似于 GPS。在已知的固定場(chǎng)所部署了多個(gè)參考點(diǎn),稱為“錨點(diǎn)”,且這些錨點(diǎn)在時(shí)間方面實(shí)現(xiàn)了緊密同步。如果為 TDoA,移動(dòng)設(shè)備將閃爍(也就是定期發(fā)送信息),當(dāng)錨點(diǎn)接收到信標(biāo)信號(hào)時(shí),將基于共同的同步時(shí)基標(biāo)記時(shí)間戳。
然后,多個(gè)錨點(diǎn)的時(shí)間戳將轉(zhuǎn)發(fā)至中央定位引擎,中央定位引擎將根據(jù)每個(gè)錨點(diǎn)的信標(biāo)信號(hào) TDoA 運(yùn)行多點(diǎn)定位算法。最后將得到移動(dòng)設(shè)備的 2D 或 3D 位置。反向 TDoA 更像 GPS。在該系統(tǒng)中,錨點(diǎn)發(fā)送同步信標(biāo)(具有固定/已知偏移,以避免發(fā)生碰撞),移動(dòng)設(shè)備利用 TDoA 和多點(diǎn)定位算法來(lái)計(jì)算其位置,如圖 2-13 所示。
到達(dá)相位差 (PDoA):另一個(gè) UWB 拓?fù)渚褪?PDoA。PDoA 可將兩個(gè)設(shè)備之間的距離與兩者之間的方位測(cè)量結(jié)合在一起,如圖 2-14 所示。利用距離和方位的組合信息,可在沒(méi)有任何其他基礎(chǔ)設(shè)施的情況下計(jì)算出兩個(gè)設(shè)備的相對(duì)位置。
為此,其中一個(gè)設(shè)備必須配備至少 2 根天線,并且能夠測(cè)量每根天線處到達(dá)信號(hào)載波的相位差。相位完全不受天線變形的影響,并且可實(shí)現(xiàn)優(yōu)于 10°的測(cè)量精度,從而可以在不到 5°的情況下確定發(fā)射器的方位。
對(duì)于每種拓?fù)浣Y(jié)構(gòu),分別最適合哪種應(yīng)用?這些用例主要側(cè)重于三個(gè)不同的領(lǐng)域:感應(yīng)式門(mén)禁、定位服務(wù)和設(shè)備對(duì)設(shè)備(點(diǎn)對(duì)點(diǎn))應(yīng)用。圖 2-15 詳細(xì)介紹了 TWR、TDoA、反向 TDoA 和 PDoA 拓?fù)浣Y(jié)構(gòu)的最佳應(yīng)用。
編輯:jq
-
藍(lán)牙
+關(guān)注
關(guān)注
115文章
5976瀏覽量
172717 -
定位技術(shù)
+關(guān)注
關(guān)注
7文章
298瀏覽量
25713 -
UWB
+關(guān)注
關(guān)注
32文章
1145瀏覽量
62093 -
RSSI
+關(guān)注
關(guān)注
2文章
97瀏覽量
28087
原文標(biāo)題:UWB技術(shù)的工作原理探討
文章出處:【微信號(hào):Qorvo_Inc,微信公眾號(hào):Qorvo半導(dǎo)體】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
UWB技術(shù)在物聯(lián)網(wǎng)與智能家居的應(yīng)用

紅外感應(yīng)技術(shù)的工作原理
巍泰技術(shù) GNSS 與 UWB 無(wú)線定位系統(tǒng)技術(shù)差異與應(yīng)用優(yōu)勢(shì)解析

UWB脈沖多普勒雷達(dá)的工作原理和應(yīng)用

如何選擇合適的UWB模塊
UWB模塊工作原理 UWB模塊應(yīng)用案例
BLE、UWB和RFID,“定位技術(shù)”哪家強(qiáng)?

一文讀懂RFID技術(shù)的工作原理及技術(shù)參數(shù)
超寬帶技術(shù)uwb的帶寬頻率是多少
uwb超寬帶技術(shù)有什么用
煤礦人員定位系統(tǒng)——基于UWB技術(shù)帶電子圍欄功能
全跡科技UWB雷達(dá)及其汽車(chē)應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論