 應用高級傳感器和算法進行低成本運動跟蹤
應用高級傳感器和算法進行低成本運動跟蹤
高性能運動跟蹤技術已經從深奧的軍事、航空電子設備、海洋和工業應用遷移到不斷擴大的消費應用范圍。盡管如此,將高性能運動跟蹤引入消費市場通常會迫使設計人員協調相互沖突的目標,尤其是在成本、功耗和計算資源方面。
然而,由于 MEMS 設計和制造工藝的進步,新一代慣性測量單元 (IMU) 正在幫助設計人員以更少的妥協提供更高水平的性能。
在介紹有望從主機處理器卸載計算密集型操作的新 6 軸 IMU 之前,本文將概述設計問題和權衡。它還將討論新的計算分區策略,這些策略可幫助設計人員以顯著降低的系統功率級別實現更高級別的運動跟蹤精度。最后,將討論新的最佳估計算法和開發工具包,它們將允許開發人員構建更高效的傳感器融合解決方案。
傳感器性能權衡
通常,消費類設備必須針對低成本進行優化。傳統上,使用 MEMS 運動傳感的消費類系統設計人員選擇將加速度計和陀螺儀樣本從 IMU 流式傳輸到應用處理器 (AP) 或傳感器集線器控制器,然后再對數據進行進一步處理。
然而,精確運動跟蹤需要大量計算資源才能與當前可用的 6 軸和 9 軸 IMU 執行傳感器融合。在這些應用中,設計人員必須支持至少數百赫茲或更高的采樣率。設計人員一直在努力以低成本提供高水平的性能,同時又不會使系統處理器過載并損害用戶體驗。
設計人員面臨的另外兩個問題是上市時間和最小化功耗。鑒于所有傳感器都會隨著時間的推移而發生漂移,校準是開發高度準確和一致的運動跟蹤子系統的關鍵。編寫自動校準算法是一種選擇,但它所花費的時間往往與消費市場中常見的較短的上市時間相沖突。隨著高性能跟蹤逐漸進入便攜式和無線系統,系統功耗的限制提供了額外的障礙。開發人員努力提供高精度運動跟蹤所需的大量計算資源,同時優化電池壽命。
最近的一些技術進步有望使開發人員的工作變得更加輕松。新的 6 軸 IMU 現在配備了先進的矢量數字信號處理 (DSP) 協處理器,有望從主機處理器卸載計算密集型操作。與此同時,新的計算分區策略正在幫助設計人員以顯著降低的系統功率水平實現更高水平的運動跟蹤精度。最后,基于擴展卡爾曼濾波器理論的新最優估計算法現在允許開發人員構建更高效的傳感器融合解決方案。
智能 IMU
新一代 MEMS IMU 的一個很好的例子是FIS1100,最初由 Fairchild 開發,現在是ON Semiconductor 的一部分。該智能 MEMS 傳感器模塊將 3 軸加速度計與 3 軸陀螺儀集成在一起,并為可選的外部第三方 3D 磁力計提供輸入。當與 XKF3 傳感器融合庫和 3D 磁力計一起使用時,FIS1100 提供完整的 9 自由度 (9DOF) 解決方案(圖 1)。
IMU 的一個關鍵組件是 AttitudeEngine,這是一種定制矢量 DSP 協處理器,能夠以高內部采樣率對高頻運動進行編碼,同時在任何輸出數據速率 (ODR) 上保持完全準確。這允許協處理器以在通用系統處理器上執行相同計算所需的一小部分功率來處理慣性數據。
使用 FIS1100,設計人員可以使用協處理器從主機處理器卸載計算密集型操作,消除頻繁數據中斷的需要,并允許系統處理器更長時間地保持睡眠模式。該專用硬件模塊可以將運動信號處理功耗降低多達 10 倍,而不會影響精度。
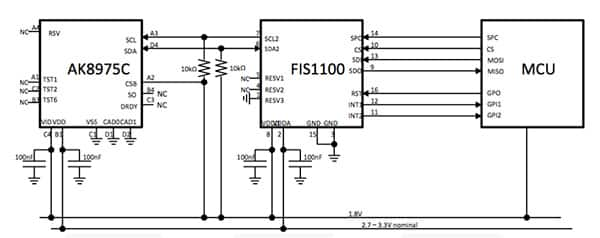
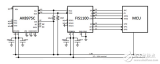
圖 1:在典型應用中,FIS1100 IMU 通過主 I 2 C 接口將其嵌入式 3 軸陀螺儀和 3 軸加速度計與第三方磁力計集成。應用處理器通過 SPI 4 線接口管理此 9DOF 解決方案。(圖片來源:安森美半導體)
卡爾曼濾波
為了幫助在極低的功率水平下開發更高精度的運動跟蹤解決方案,開發人員正在采用基于卡爾曼濾波理論的新的最佳估計算法。通常,卡爾曼濾波是一種算法,它使用隨時間觀察到的一系列測量值來預測未知變量的估計值,這些測量值包含統計誤差和其他不準確之處。該系列往往比單次測量更準確。
卡爾曼濾波器通過使用兩步形式的反饋控制來估計過程。濾波器估計某個時間的過程狀態,然后以噪聲測量的形式獲得反饋。因此,卡爾曼濾波器的方程分為兩組:時間更新方程和測量更新方程。時間更新方程負責(及時)預測當前狀態和誤差協方差估計,以獲得下一時間步長的估計。測量方程負責反饋。
記錄下一次測量的結果后,將使用加權平均值更新估計值。在這個過程中,對確定性較高的估計給予更多的權重。
重要的是要記住卡爾曼濾波器算法是遞歸的。這使得實際實施更加可行。
與旨在直接對每個估計的所有數據進行操作的其他方法不同,卡爾曼濾波器理論遞歸地調節所有過去測量的當前估計。它可以僅使用當前輸入測量值和先前計算的狀態及其不確定性矩陣實時運行。不需要額外的過去信息。
傳感器融合的進展
XSENS 的工程師使用了上述卡爾曼濾波技術,該公司是 Fairchild 于 2014 年收購的傳感器融合軟件開發商。該團隊創建了一種稱為 XKE3 的最佳估計算法,該算法以極低的功耗提高了運動跟蹤性能。XKE3 Sensor Fusion 是一個二進制軟件庫,它集成了 3D 加速度計、3D 陀螺儀和 3D 磁力計數據,以在地球固定參考系中計算 3D 方向。XKE3 算法的可靠性已經確立;它們已在軍事和工業應用中使用了十多年。
通過將 FIS1100、其 3 軸加速度計和 3 軸陀螺儀與第三方磁力計和 XKE3 傳感器融合軟件捆綁在一起,安森美半導體為開發人員提供了完整的 9DOF 解決方案。此外,該捆綁解決方案通過提供滾轉、俯仰和偏航方向規范,極大地簡化了系統開發。
傳統上,需要添加運動跟蹤功能的設計人員必須通過過時的傳感器級規范并學習復雜的運動處理基礎知識。現在,他們有一個提供滾轉、俯仰和偏航規范的解決方案,使他們能夠在構建第一個原型之前知道預期的航向性能。
XKE3 庫在微控制器或應用處理器上運行,以可配置的速率從 FIS1100 收集運動數據。在這個 9 軸解決方案中(再次參見圖 1),FIS1100 以相對較高的頻率 (1 kHz) 對加速度計和陀螺儀數據進行采樣,并將其發送到 AttitudeEngine 協處理器,后者執行高精度捷聯積分 (SDI) 計算. 協處理器還將磁力計數據與慣性數據同步,以獲得克隆和劃槳補償的方向和速度增量,以及可選的磁力計數據,并將其全部傳輸到 XKE3 引擎。
XKE3 在傳感器校準中起著關鍵作用。例如,各種各樣的過程,從振動和溫度到設備老化和機械應力,都會隨著時間的推移改變磁力計的輸出。通常,校準參數的這些變化非常微妙。XFK3 使用零用戶交互校準來補償這些變化,該校準會持續自動校準每個傳感器的最重要錯誤。這消除了用戶中斷的需要。
計算分區
FIS1100 和 XKE3 能夠以較低功率提高運動跟蹤性能的另一個關鍵因素是使用創新的計算分區策略。傳統上,設計師將加速度計和陀螺儀樣本從 IMU 流式傳輸到主機處理器,然后主機處理器執行慣性量的 SDI。這種架構如圖(圖 2)所示。然后傳感器融合算法使用積分值來提供所需的輸出。
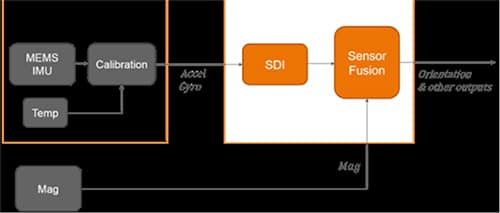
圖 2:在傳統架構的描述中,加速度計和陀螺儀樣本直接從 IMU 流式傳輸到主機處理器以執行慣性量的 SDI。(圖片來源:安森美半導體)
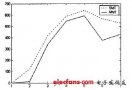
采用這種架構,加速度計和陀螺儀信號以高速從 IMU 傳輸到主機處理器是保持運動跟蹤精度所必需的。但是,不需要向主機處理器進行高速數據傳輸,因為最終應用所需的更新速率范圍從僅幾赫茲(對于行人導航等應用)到高達 30 至 60 赫茲(用于游戲、健身追蹤和機器人控制) . 甚至更高性能的應用程序,如虛擬和增強現實,只需要大約 100 Hz。在這種情況下,設計人員只需以高速率傳輸數據即可對加速度和角速度進行精確的數值積分。
然而,設計人員仍然為高速率的流數據付出代價。該架構強制主機處理器處理更頻繁的數據中斷,以防止其盡可能頻繁地進入睡眠模式。因此,整個系統功耗增加。
緩解此問題的一種方法是在 IMU 側使用 FIFO 緩沖區。不幸的是,這種方法帶來了新的問題,例如:
- 主機處理器需要處理更多的數據
- 當多個外設共享同一總線時,SPI/I 2 C上發生總線爭用/沖突的可能性增加
- 無線應用中更高的丟包概率
- 主機處理器對高速串行總線模式和 DMA 支持的需求增加
設計人員可以通過將算法分割成運行在 FIS1100 上的高性能段和運行在 XKE3 引擎上的低速率段,然后使用 FIS1100 在 IMU 側實現 SDI 算法,從而顯著降低系統處理器的計算負載(圖 3)。當系統在具有全自動校準功能的高精度 3D 融合模式下運行時,這種方法更加有益。
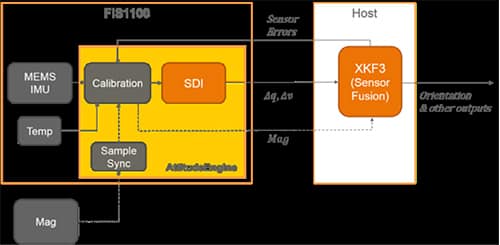
圖 3:利用上述架構,設計人員通過在 FIS1100 AttitudeEngine 上執行高數據速率 SDI 計算并將低速率方向和速度增量流式傳輸到在主機端運行的 XKF3 傳感器融合算法,從而獲得更高的能效。(圖片來源:安森美半導體)
此外,通過在 XKE3 引擎上以非常低的采樣率運行狀態跟蹤部分,設計人員可以跟蹤更多的狀態,從而在不損失系統資源的情況下對多個校準參數進行統計優化跟蹤。
在 AttitudeEngine 模式下運行 FIS1100,設計人員可以通過將加速度計和陀螺儀信號轉換為數字域,并使用帶寬約為 200 Hz 的低通濾波器來實現這一點。這允許 AttitudeEngine 在硬件中以 1 kHz 輸入速率執行 SDI 計算,確保運動積分數字計算的任何錯誤都可以忽略不計。
將 FIS1100 流運動數據編碼為方向和速度增量而不是傳統的角速度和加速度樣本,計算是準確的,與所選的輸出速率無關。低輸出速率導致運動數據的時間表示較粗,但數據仍然準確。因此,可以根據特定的應用要求來選擇輸出速率,而不是由執行高精度數值積分的需要所驅動。
使用這種創新架構,設計人員可以獲得多種好處:
- 在專用硬件而非主機處理器上運行 SDI 可顯著降低功耗
- 無論選擇何種輸出數據速率,運動信息都保持準確
- 將 SDI 功能移至架構的 IMU 側,通過減少計算需求來簡化系統集成
啟動設計的開發套件
構建高精度運動跟蹤解決方案可能需要花費大量時間和精力。為了加速系統性能和精度的分析,并簡化硬件集成和嵌入式軟件集成,安森美半導體提供了 FIS1100 評估套件。該套件提供 FIS1100 評估系統以及 XKE3 傳感器融合庫、FIS1100 參考驅動程序以及 ARM? Cortex?-M 微控制器的示例傳感器融合項目。
該評估套件通過易于使用的 MT 管理器 Windows GUI 應用程序進行管理。評估首先將與 Arduino 兼容的FEBFIS1100 MEMS_IMU6D3X屏蔽板安裝到NXP LPCXPRESSO54102 MCU 板上,如圖所示(圖 4)。然后 MCU 板通過 USB 電纜連接到主機 PC。

圖 4a

圖 4b
圖 4:FIS1100 評估套件通過提供一個兩板組來簡化系統性能和軟件和硬件集成的分析,該組在 NXP LPCXpresso54102 ARM Cortex-M 開發板上安裝了兼容 Arduino UNO R3 的 FEBFIS1100MEMS_IMU6D3X 屏蔽板 (a) (b) . (圖片來源:安森美半導體)
安裝驅動程序后,用戶啟動 MT Manager 應用程序,該應用程序會自動掃描連接的系統和顯示器。當開發人員在設備列表中選擇評估套件時,他們可以通過打開輸出配置面板來管理系統運行參數。FIS1100 和 XKE3 融合庫的所有主要功能都可以通過輸出配置對話框屏幕進行配置。
為了幫助解釋傳感器數據,MT Manager 提供了許多有用的可視化工具。3D 方向視圖提供評估板的 3D 方向表示。慣性數據視圖可幫助用戶了解 XKE3 融合庫輸出的慣性和磁場數據。包括對典型傳感器誤差的校正,例如陀螺儀偏差和磁性硬鐵和軟鐵失真。對于需要跟蹤系統短期運動(例如手臂相對于軀干的運動)的用戶,速度數據視圖提供了 XKE3 融合庫高通速度輸出的圖形利用。
結論
高性能運動跟蹤功能不再局限于神秘的軍事和航空電子應用。如今,在對成本敏感的消費市場中,對開發這些相同功能的需求正在迅速增長。如上所述,設計人員現在可以應用新一代智能、低噪聲、低漂移 IMU。計算分區的新方法和傳感器融合軟件的進步使這種轉變成為可能。
審核編輯:符乾江
-
傳感器
+關注
關注
2554文章
51592瀏覽量
757851 -
mcu
+關注
關注
146文章
17404瀏覽量
353330 -
mems
+關注
關注
129文章
3977瀏覽量
191338
發布評論請先 登錄
相關推薦
如何有效使用智能運動傳感器進行運動跟蹤?
Micronas提供低成本的可編程線性霍爾傳感器HAL1820
中國傳動網:全景掃描MEMS運動傳感器
低成本動態傾角傳感器
Fairchild發布內嵌傳感器融合的工業級 Turnkey 運動跟蹤模塊方案
什么運動跟蹤傳感器能跟蹤多個對象?
SMSC高精度低成本溫度傳感器
SMSC高精度低成本的溫度傳感器
基于多傳感器的多模型機動目標跟蹤算法設計
低成本ONSEMI免電池傳感器監測
焊接傳感器一款轉為焊接機器人而設計的焊縫跟蹤傳感器
多傳感器多目標跟蹤的JPDA算法
應用先進傳感器與演算法於低成本運動追蹤






 工商網監
工商網監
評論