") 研究自動駕駛技術(shù)的算法需要哪些知識?
研究自動駕駛技術(shù)的算法需要哪些知識?

編者薦語后臺有同學(xué)詢問自動駕駛的技術(shù)棧,這里總結(jié)知乎的提問與自己的一些認(rèn)識,對自動駕駛進(jìn)行一定的介紹。自動駕駛系統(tǒng)包括環(huán)境感知和定位,行為預(yù)測和規(guī)劃控制。作為計(jì)算機(jī)視覺方面的研究人員,這里就只說說環(huán)境感知方面需要的知識吧。
1 前言
感知任務(wù)大多涉及算法設(shè)計(jì),因此文章的介紹也以算法為主線,特別是深度學(xué)習(xí)的算法。此外也會涉及一些數(shù)據(jù)采集,系統(tǒng)測試,算法部署以及量產(chǎn)感知系統(tǒng)的分析。
自動駕駛中的環(huán)境感知包含了自動駕駛和環(huán)境感知兩個(gè)概念。首先,什么是自動駕駛呢?下面是維基百科上對自動駕駛汽車的定義。
自動駕駛汽車,又稱無人駕駛車、電腦駕駛車、無人車、自駕車,為一種需要駕駛員輔助或者完全不需操控的車輛。作為自動化載具,自動駕駛汽車可以不需要人類操作即能感測其環(huán)境及導(dǎo)航。
上述定義里有幾個(gè)關(guān)鍵詞。首先是汽車,我們這里所說的自動駕駛技術(shù)涉及的是汽車,而不是飛機(jī)火車之類的交通工具。其次是感知環(huán)境和導(dǎo)航,也就是說自動駕駛汽車可以自主的采集和理解周邊環(huán)境信息,并根據(jù)設(shè)定的目的地進(jìn)行決策和行進(jìn)。最后是需要駕駛員輔助或者完全不需操控,這里涉及到自動駕駛系統(tǒng)的分級,是一個(gè)非常重要的概念,下面稍微展開說一下。
自動駕駛技術(shù)不是從0到1的質(zhì)變,而是一個(gè)漸變迭代的過程。關(guān)于自動駕駛系統(tǒng)的分級,目前最常用的標(biāo)準(zhǔn)是由SAE(美國汽車工程師學(xué)會)制定的。不同機(jī)構(gòu)制定的標(biāo)準(zhǔn)會略有不同,但是基本的概念是一致的。下表對L0(人工駕駛)到L5(完全自動駕駛)六個(gè)級別進(jìn)行了總結(jié)。這些定義可能有些難懂,但是與車輛上不同的功能結(jié)合起來就容易理解了。比如說,汽車中現(xiàn)在標(biāo)配的防抱死制動系統(tǒng)(ABS)和車身電子穩(wěn)定系統(tǒng)(ESP)就都屬于L1級別。此外,定速巡航、自適應(yīng)巡航(ACC)以及車道保持輔助 (LKA)也屬于L1級別的范疇,因?yàn)樗鼈冎荒茉谝粋€(gè)方向上(橫向或縱向)操控車輛。如果同時(shí)實(shí)現(xiàn)了 ACC和LKA,那么這輛車就來到了L2級別。對于L2及其以下級別的系統(tǒng)來說,車輛的駕駛員都需要監(jiān)控周圍環(huán)境并隨時(shí)做好接管的準(zhǔn)備。這一點(diǎn)非常關(guān)鍵,這也是很多L2級別的車輛出現(xiàn)交通事故的主要原因,也就是駕駛員對系統(tǒng)期望過高,在駕駛過程中沒有時(shí)刻保持對周邊環(huán)境的關(guān)注。如果一個(gè)車輛配備了某種Pilot系統(tǒng),比如Traffic Jam Pilot,那么就達(dá)到了L3級別。這就意味著,在某些特定的場景下(比如高速公路,堵車等),駕駛員不需要時(shí)刻監(jiān)控當(dāng)前路況,可以松手,松腳,松眼,只需要在系統(tǒng)提示時(shí)接管車輛即可。在這種限定的情況下,駕駛員已經(jīng)成為了乘客。對于L4級別的系統(tǒng),目前只存在于演示車輛中。我們平時(shí)看到的諸如“某廠家的車輛在某道路上實(shí)現(xiàn)了XX小時(shí)無人工接管的自動行駛”,這都屬于L4級別的范疇,與L3最大的區(qū)別是不需要人工接管了,在限定場景下可以實(shí)現(xiàn)車輛的完全自主行駛。L5級別就是把“限定場景”這個(gè)條件也去掉了。這個(gè)級別的車輛最大的特點(diǎn)就是沒有方向盤了,所有人都是乘客,車輛的所有操控權(quán)都屬于系統(tǒng)。

了解了自動駕駛是什么以后,我們再來看看自動駕駛系統(tǒng)是怎么實(shí)現(xiàn)的。一般來說,自動駕駛系統(tǒng)包含感知,決策和控制這三個(gè)主要模塊。粗略來說,這三個(gè)模塊對應(yīng)生物系統(tǒng)的眼睛,大腦和四肢。感知系統(tǒng)(眼睛)負(fù)責(zé)了解周圍障礙物和道路的信息,決策系統(tǒng)(大腦)根據(jù)周圍的環(huán)境以及設(shè)定的目標(biāo)決定下一步需要執(zhí)行的動作,而控制系統(tǒng)(四肢)則負(fù)責(zé)執(zhí)行這些動作,比如轉(zhuǎn)向,加速,剎車等。進(jìn)一步來說,感知系統(tǒng)里又包括了環(huán)境感知和車輛定位兩個(gè)任務(wù)。環(huán)境感知負(fù)責(zé)檢測各種移動和靜止的障礙物(比如車輛,行人,建筑物等),以及收集道路上的各種信息(比如可行駛區(qū)域,車道線,交通標(biāo)志,紅綠燈等),這里需要用到的主要是各種傳感器(比如攝像頭,激光雷達(dá),毫米波雷達(dá)等)。車輛定位則根據(jù)環(huán)境感知得到的信息來確定車輛在環(huán)境中所處位置,這里需要高精度地圖,以及慣性導(dǎo)航(IMU)和全球定位系統(tǒng)(GPS)的輔助。
本專欄主要關(guān)注環(huán)境感知系統(tǒng),重點(diǎn)會介紹攝像頭,激光雷達(dá)和毫米波雷達(dá)這三種主要的傳感器,以及它們的融合。不同的傳感器有著不同的特性,各自都有優(yōu)缺點(diǎn),因此也適用于不同的任務(wù)。攝像頭是感知系統(tǒng)中最常用的傳感器,優(yōu)勢在于能夠提取豐富的紋理和顏色信息,因此適用于目標(biāo)的分類。但是其缺點(diǎn)在于對于距離的感知能力較弱,并且受光照條件影響較大。激光雷達(dá)在一定程度上彌補(bǔ)了攝像頭的缺點(diǎn),可以精確的感知物體的距離和形狀,因此適用于中近距的目標(biāo)檢測和測距。但是其缺點(diǎn)在于成本較高,量產(chǎn)難度大,感知距離有限,而且同樣受天氣影響較大。毫米波雷達(dá)具有全天候工作的特點(diǎn),可以比較精確的測量目標(biāo)的速度和距離,感知距離較遠(yuǎn),價(jià)格也相對較低,因此適用于低成本的感知系統(tǒng)或者輔助其它的傳感器。但是缺點(diǎn)在于高度和橫向的分辨率較低,對于靜止物體的感知能力有限。
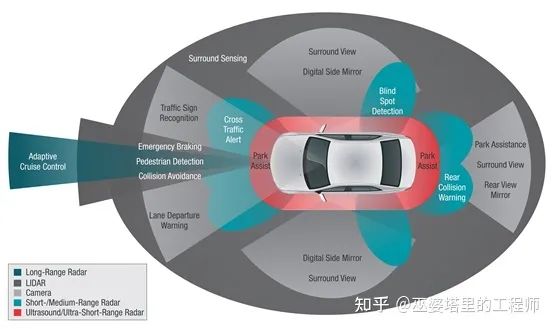
環(huán)境感知系統(tǒng)中的多種傳感器
2 技術(shù)概覽
上一節(jié)中提到了,環(huán)境感知系統(tǒng)的硬件基礎(chǔ)是多種傳感器以及它們的組合,而軟件方面的核心則是感知算法。總的來說,感知算法要完成兩個(gè)主要的任務(wù):物體檢測和語義分割。前者得到的是場景中重要目標(biāo)的信息,包括位置,大小,速度等,是一種稀疏的表示;而后者得到的是場景中每一個(gè)位置的語義信息,比如可行駛,障礙物等,是一種稠密的表示。這兩個(gè)任務(wù)的結(jié)合被稱為全景分割,這也是自動駕駛和機(jī)器人領(lǐng)域最近興起的一個(gè)概念。對于物體目標(biāo)(比如車輛,行人),全景分割輸出其分割Mask,類別和實(shí)例ID;對于非物體目標(biāo)(比如道路,建筑物),則只輸出其分割Mask和類別。環(huán)境感知系統(tǒng)的終極目標(biāo)就是要得到車輛周邊三維空間中全景分割結(jié)果。當(dāng)然對于不同級別,不同場景下的自動駕駛應(yīng)用來說,需要的感知輸出不也盡相同。
自動駕駛駕駛技術(shù)這一輪的爆發(fā)很大程度上來源于深度學(xué)習(xí)在計(jì)算機(jī)視覺領(lǐng)域取得的突破,而這個(gè)突破首先是從圖像分類和圖像中的物體檢測開始的。在自動駕駛環(huán)境感知中,深度學(xué)習(xí)最先取得應(yīng)用的任務(wù)是單張二維圖像中的物體檢測。這個(gè)領(lǐng)域中的經(jīng)典算法,比如Faster R-CNN,YOLO,CenterNet等都是不同時(shí)期視覺感知算法的主流。但是,車輛不能僅僅依靠一張二維圖像上的檢測結(jié)果來行駛。因此,為了滿足自動駕駛應(yīng)用的需求,這些基礎(chǔ)的算法還需要進(jìn)行進(jìn)一步的擴(kuò)展,其中最重要的就是融合時(shí)序信息和三維信息。前者衍生出了物體跟蹤算法,后者衍生出了單目/雙目/多目的三維物體檢測算法。以此類推,語義分割包含了圖像語義分割,視頻語義分割,稠密深度估計(jì)。
為了得到更加精確的三維信息,激光雷達(dá)也一直是自動駕駛感知系統(tǒng)的重要組成部分,尤其是對于L3/4級別的應(yīng)用。激光雷達(dá)的數(shù)據(jù)是相對稀疏的點(diǎn)云,這與圖像稠密的網(wǎng)格結(jié)構(gòu)差別非常大,因此圖像領(lǐng)域常用的算法需要經(jīng)過一定的改動才能應(yīng)用到點(diǎn)云數(shù)據(jù)。點(diǎn)云感知的任務(wù)也可以按照物體檢測和語義分割來劃分,前者輸出三維的物體邊框,而后者輸出點(diǎn)云中每個(gè)點(diǎn)的語義類別。為了利用圖像領(lǐng)域的算法,點(diǎn)云可以轉(zhuǎn)換為鳥瞰視圖(Bird‘s Eye View)或者前視圖(Range View)下的稠密網(wǎng)格結(jié)構(gòu)。此外,也可以改進(jìn)深度學(xué)習(xí)中的卷積神經(jīng)網(wǎng)絡(luò)(Convolutional Neural Network, CNN),使其適用于稀疏的點(diǎn)云結(jié)構(gòu),比如PointNet或者Graph Neural Network。
毫米波雷達(dá)由于其全天候工作,測速準(zhǔn)確,以及低成本的特點(diǎn),也被廣泛的用于自動駕駛感知系統(tǒng)中,不過一般應(yīng)用在L2級別的系統(tǒng)中,或者在L3/4級系統(tǒng)中作為其它傳感器的輔助。毫米波雷達(dá)的數(shù)據(jù)一般來說也是點(diǎn)云,但是比激光雷達(dá)的點(diǎn)云更為稀疏,空間分辨率也更低。相比于攝像頭和激光雷達(dá),毫米波雷達(dá)的數(shù)據(jù)密度非常低,因此一些傳統(tǒng)方法(比如聚類和卡爾曼濾波)表現(xiàn)的并不比深度學(xué)習(xí)差很多,而這些傳統(tǒng)方法的計(jì)算量相對較低。最近幾年來,開始有研究者從更底層的數(shù)據(jù)出發(fā),用深度學(xué)習(xí)代替經(jīng)典的雷達(dá)信號處理,通過端對端的學(xué)習(xí)取得了近似激光雷達(dá)的感知效果。
單個(gè)傳感器的感知能力總是有限的,如果把系統(tǒng)成本先放在一邊,多傳感器融合的方案自然更好的選擇。一般來說,攝像頭是感知系統(tǒng)的必備的傳感器,為了得到深度信息和360度的視場,可以采用雙目或者多目融合的方案。為了更準(zhǔn)確的獲得三維和運(yùn)動信息,攝像頭也可以與激光雷達(dá)和毫米波雷達(dá)進(jìn)行融合。這些傳感器的坐標(biāo)系不同,數(shù)據(jù)形式不同,甚至采集頻率也不同,因此融合算法的設(shè)計(jì)并不是一件簡單的任務(wù)。粗略來說,融合可以在決策層(融合不同傳感器的輸出)或者數(shù)據(jù)層(融合不同傳感器的數(shù)據(jù)或者中間結(jié)果)來進(jìn)行。數(shù)據(jù)層融合理論上說是更好的方法,但是對傳感器之間的空間和時(shí)間對齊要求會更高。
以上大致介紹了環(huán)境感知中所涉及的算法部分,算法部分的其它一些內(nèi)容,比如多目相機(jī)的融合,多傳感器的空間和時(shí)間對齊,后續(xù)也會進(jìn)行介紹。
除了核心算法設(shè)計(jì)以外,感知系統(tǒng)中其它重要的部分還包括數(shù)據(jù)的采集和標(biāo)注,算法的測試和迭代,以及系統(tǒng)的部署等,這些內(nèi)容之后專欄中也會推出系列文章進(jìn)行分析。
3 行業(yè)現(xiàn)狀
了解了感知系統(tǒng)中所包含的技術(shù)之后,下一步我們來看看這些傳感器在目前的量產(chǎn)或者演示車輛中的應(yīng)用現(xiàn)狀。
粗略來說,自動駕駛公司可以分為兩大類別。一類是傳統(tǒng)的車企(比如國外的大眾,寶馬,通用,豐田等,國內(nèi)的長城,吉利等),新能源車企(比如特斯拉,蔚來,小鵬等)和Tier1(比如國外老牌的博世,大陸,安波福)等,以及國內(nèi)新興的華為,大疆等)。這類公司的首要目標(biāo)是量產(chǎn),一般以L2級別方案為主,目前也在向L3級別擴(kuò)展。另外一類是一些方案提供商或者初創(chuàng)公司(比如Waymo,Mobileye,Pony.AI,Momenta,TuSimple等)。這些公司致力于發(fā)展L4級別的自動駕駛技術(shù),面向的是諸如Robotaxi,Robotruck和Robobus之類的應(yīng)用。
對于不同的自動駕駛級別,不同的應(yīng)用場景,傳感器的配置方案也不盡相同。對于L2級別的應(yīng)用,比如緊急制動和自適應(yīng)巡航,可以只采用前視單目攝像頭或者前向毫米波雷達(dá)。如果需要變道輔助功能,則需要增加傳感器對相鄰車道進(jìn)行感知。常用的方案是在車頭和車尾增加多個(gè)角雷達(dá),以實(shí)現(xiàn)360度的目標(biāo)檢測能力。對于L3級別的應(yīng)用,需要在特定場景下實(shí)現(xiàn)車輛的完全自主駕駛,因此需要擴(kuò)展車輛對周邊環(huán)境的感知能力。這時(shí)就需要增加激光雷達(dá),側(cè)視和后視的攝像頭和毫米波雷達(dá),以及GPS,IMU和高精度地圖來輔助車輛定位。到了L4級別以后,由于在特定場景下不需要人工接管了,傳感器就不僅需要高精確度,還需要高可靠性。這就需要增加傳感器的冗余性,也就是說需要備用系統(tǒng)。
下面我們來看幾個(gè)具體的案例。
首先是特斯拉近期推出的純視覺方案。雖然一提起自動駕駛,很多人腦子里最先想到的就是特斯拉,但是特斯拉其實(shí)也只是L2級別(或者說高級L2)的自動駕駛系統(tǒng),因?yàn)檫€是需要駕駛員隨時(shí)準(zhǔn)備好接管車輛。如果你只在L2級別的系統(tǒng)里橫向?qū)Ρ龋敲刺厮估姆桨高€是很有競爭力的。這個(gè)系統(tǒng)只采用了視覺傳感器,包括了安裝在車身不同位置,多種焦距和視野范圍的攝像頭。這些攝像頭可以覆蓋360度的視野,并且有一定的冗余性。特斯拉在AI Day上展示的基于深度學(xué)習(xí)的的多攝像頭融合算法,個(gè)人覺得還是非常值得研究一下的,后續(xù)也會推出文章進(jìn)行詳細(xì)分析。
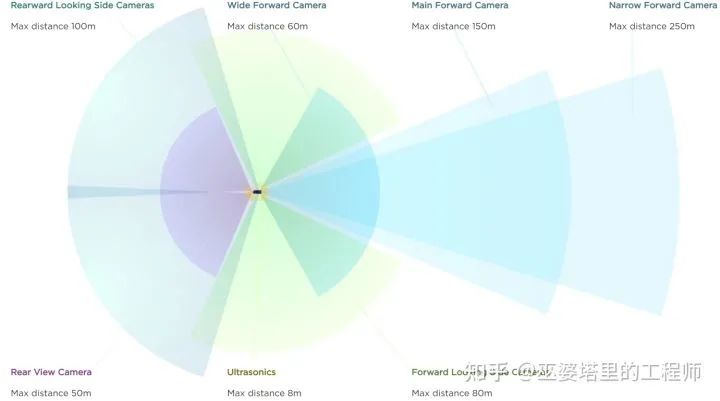
特斯拉的純視覺傳感器配置(L2級別)
2017年夏天,奧迪發(fā)布了第四代A8,其中最大的亮點(diǎn)就是搭載了Traffic Jam Pilot(TJP)系統(tǒng)。前文提到了,TJP系統(tǒng)已經(jīng)屬于L3的范疇,因此奧迪A8可以說是全球首個(gè)“量產(chǎn)”的L3級系統(tǒng)。為什么加上引號呢,這是因?yàn)樵摴δ茉诮桓兜能囕v中一直沒有開啟,用戶只能在奧迪自己的演示車中體驗(yàn)。奧迪官方的解釋是法規(guī)方面的問題,但其實(shí)最核心的原因還是技術(shù)方面的,也就是L3中的所謂的“接管悖論”問題。在60公里時(shí)速以下的結(jié)構(gòu)化道路堵車場景中,TJP系統(tǒng)允許駕駛員低頭玩手機(jī)或者睡覺。這時(shí)如果出現(xiàn)突發(fā)狀況,可能就會出現(xiàn)接管不及的情況。雖然奧迪在2019年底取消了L3級自動駕駛項(xiàng)目,但是這個(gè)探索也為后續(xù)的L4和各種高級L2系統(tǒng)的研發(fā)提供了寶貴的經(jīng)驗(yàn)。更多的細(xì)節(jié)這里就不展開說了,我們下面來看看這套系統(tǒng)中傳感器方案。奧迪A8全車共有12個(gè)超聲波傳感器、4個(gè)全景攝像頭、1個(gè)前置攝像頭、4個(gè)中程雷達(dá)、1個(gè)遠(yuǎn)程雷達(dá)、1個(gè)紅外攝像機(jī)。此外,奧迪A8首次搭載了一個(gè)4線的車規(guī)級激光雷達(dá),并且配備中央駕駛輔助系統(tǒng)控制單元(zFAS),這些都是L3級自動駕駛系統(tǒng)的必備選項(xiàng)。
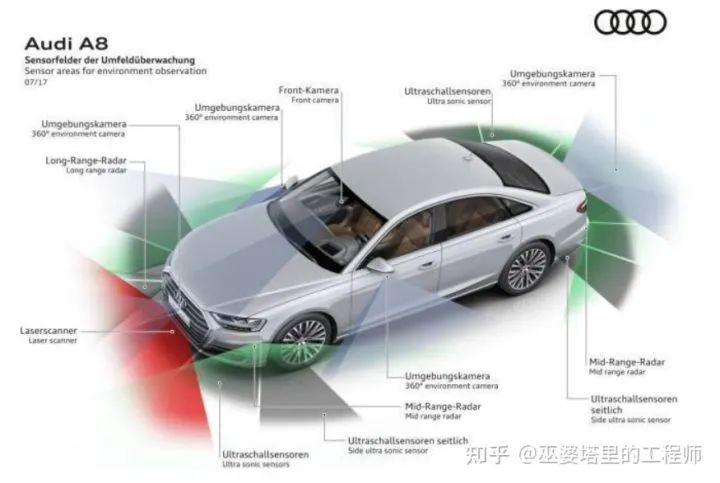
奧迪A8的傳感器配置(L3級別)
從L2到L3,再到L4,傳感器方面最大的變化就是增加了激光雷達(dá),而且數(shù)量逐漸增加。比如,在Waymo的傳感器方案中,除了前向的激光雷達(dá)外,還增加了后向和車頂?shù)?60度激光雷達(dá)。而且激光雷達(dá)的線束數(shù)量顯著提高,可以達(dá)到300米左右的感知范圍。除了Waymo,其它各家公司的L4系統(tǒng)都不可避免的包含了一個(gè)或者多個(gè)激光雷達(dá)。從目前的技術(shù)發(fā)展趨勢來看,實(shí)現(xiàn)L4級別的自動駕駛主要還是靠增加傳感器,從而大幅提升對駕駛路況和環(huán)境的感知能力,而這其中最重要的就是激光雷達(dá)。到了L4級別,車輛在限定場景下完全自主行駛,這時(shí)99%的準(zhǔn)確度就不夠了,而需要的是99.99999%的準(zhǔn)確度,而激光雷達(dá)就是小數(shù)點(diǎn)后幾位的保障。這種保障來自激光雷達(dá)與其它各種傳感器之間的配合,而不僅僅是簡單的堆疊,因此高效精確的傳感器融合在L4級別的系統(tǒng)中起到至關(guān)重要的作用。
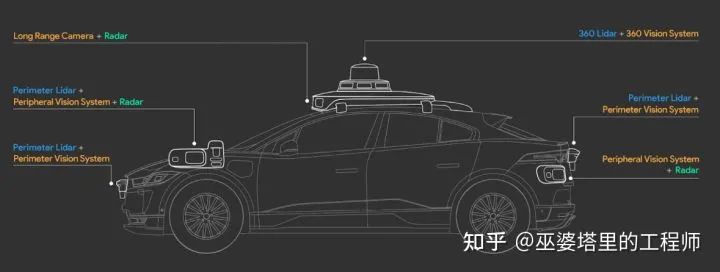
Waymo的傳感器配置(L4級別)
以上只是簡單的介紹了L2/3/4級別中傳感器配置的一些典型案例,專欄會在后續(xù)的文章中詳細(xì)分析不同公司的自動駕駛技術(shù)路線,以及相應(yīng)的傳感器配置和感知系統(tǒng)設(shè)計(jì)。
審核編輯 :李倩
-
傳感器
+關(guān)注
關(guān)注
2565文章
52930瀏覽量
766827 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14305瀏覽量
170510
原文標(biāo)題:入門 | 研究自動駕駛技術(shù)的算法需要哪些知識?
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
卡車、礦車的自動駕駛和乘用車的自動駕駛在技術(shù)要求上有何不同?

自動駕駛技術(shù)落地前為什么要先測試?
新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角
自動駕駛規(guī)控算法驗(yàn)證到底需要什么樣的場景仿真軟件?

2024年自動駕駛行業(yè)熱點(diǎn)技術(shù)盤點(diǎn)
如何實(shí)現(xiàn)自動駕駛規(guī)控算法的仿真驗(yàn)證

端到端自動駕駛技術(shù)研究與分析
一文聊聊自動駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新

自動駕駛汽車安全嗎?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論